แอพพลิเคชั่นการวิเคราะห์ลายเซ็นกระแสมอเตอร์ (MCSA)
เทคโนโลยีการวินิจฉัยมอเตอร์แพร่หลายมากขึ้นในช่วงปี 1990 และเข้าสู่ศตวรรษใหม่ เทคโนโลยีดังกล่าวรวมถึงการวิเคราะห์วงจรมอเตอร์ (MCA) และการวิเคราะห์ลายเซ็นกระแสมอเตอร์ (MCSA) ที่ใช้กับระบบมอเตอร์ไฟฟ้าทั้งที่มีพลังงานและไม่ใช้พลังงาน แอปพลิเคชั่นดูเหมือนจะไม่มีที่สิ้นสุด
ระบบที่รวมอยู่ในบทความนี้ ได้แก่ เครื่องวิเคราะห์วงจรมอเตอร์ ALLTEST IV PRO 2000, เครื่องวิเคราะห์ลายเซ็นกระแสไฟฟ้ามอเตอร์ ALL-TEST PRO OL, ซอฟต์แวร์การจัดการมอเตอร์ EMCAT, ซอฟต์แวร์ Power System Manager และซอฟต์แวร์ ATPOL MCSA ชุด ALL-TEST PRO MD รวมการบูรณาการของระบบเหล่านี้ทั้งหมด นอกเหนือจากซอฟต์แวร์ MotorMaster Plus ของกระทรวงพลังงานสหรัฐ วัตถุประสงค์ของบทความนี้คือการเน้นย้ำถึงแอปพลิเคชัน MCSA ของระบบ ALL-TEST PRO MD ซึ่งรักษาสิ่งต่อไปนี้:
- การอ่าน MCA ของความต้านทาน อิมพีแดนซ์ ความเหนี่ยวนำ มุมเฟส การตอบสนองกระแส/ความถี่ และการทดสอบความเป็นฉนวนกับพื้น (เมกโอห์ม)
- ความสามารถของ MCSA ในการดีมอดูเลตแรงดันและกระแส รวมถึงการวิเคราะห์ FFT ถึง 5 kHz
- ความสามารถในการวิเคราะห์อัตโนมัติและแนวโน้มสำหรับทั้ง MCA และ MCSA ผ่านซอฟต์แวร์
- การบันทึกและวิเคราะห์ข้อมูลคุณภาพกำลังไฟฟ้าเต็มรูปแบบ รวมถึงการจับภาพเหตุการณ์สามเฟสในทันที
ตัวอย่างที่พบในเอกสารนี้รวมถึงแอปพลิเคชันที่เป็นไปได้มากมายที่มีให้ผ่านการนำเทคโนโลยีการวินิจฉัยมอเตอร์มาใช้
การทดสอบโรเตอร์บาร์
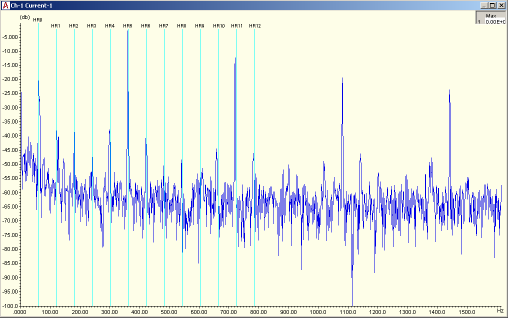
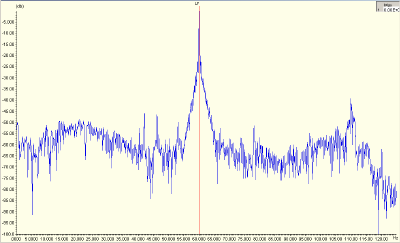
จุดประสงค์พื้นฐานที่อยู่เบื้องหลังการพัฒนาดั้งเดิมของเทคโนโลยี MCSA คือการตรวจจับความผิดปกติของโรเตอร์บาร์ แท่งโรเตอร์เป็นเรื่องยากที่จะประเมินด้วยวิธีการทดสอบแบบดั้งเดิม รวมถึงการวิเคราะห์การสั่นสะเทือน พิจารณาแล้วว่าสามารถใช้วิธีการที่ใช้กระแสเพื่อประเมินสภาพของแท่งโรเตอร์ได้ กฎพื้นฐานนั้นง่าย: แถบด้านข้างของความถี่ผ่านเสารอบความถี่สายพื้นฐาน เมื่อมอเตอร์อยู่ภายใต้ภาระ แสดงว่ามีปัญหากับโรเตอร์ กฎมาตรฐานได้รับการพิจารณาแล้วว่าปัญหาของแถบโรเตอร์นั้นร้ายแรงเมื่อจุดสูงสุดของแถบด้านข้างเข้าใกล้ภายใน 35 dB ของความถี่สูงสุดของบรรทัด
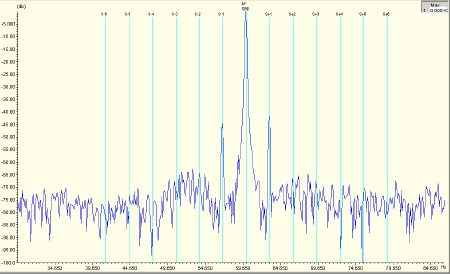
รูปที่ 1: ความถี่โรเตอร์บาร์
ตัวอย่างในรูปที่ 1 แสดงแถบข้างที่ประมาณ -40 dB จากความถี่ของสายสูงสุด สิ่งนี้จะบ่งบอกถึงแถบโรเตอร์ที่แตกหักอย่างน้อยหนึ่งตัวในมอเตอร์ 500 แรงม้า 4160 โวลต์บนคอมเพรสเซอร์
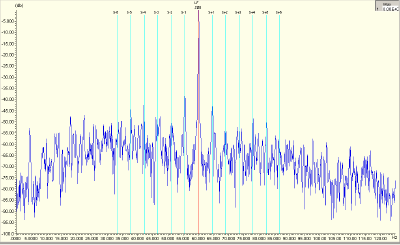
รูปที่ 2 เป็นตัวอย่างของหนึ่งในสองที่เป็นไปได้
สถานการณ์:
- การหล่อช่องว่างในโรเตอร์อะลูมิเนียม
- ฟันอ่อน (หรือฟัน) ในการใช้งานแบบเฟือง
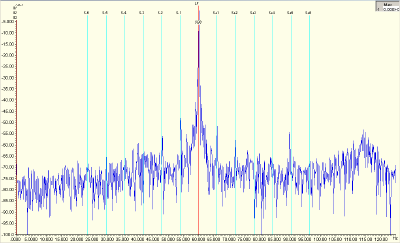
รูปที่ 2: การหล่อโมฆะหรือฟันเฟือง ‘อ่อน’
เมื่อใช้แรงดันไฟฟ้าดีโมดูเลตที่มีความถี่สูงกว่าและ FFT ในปัจจุบัน ปัญหาต่างๆ เช่น ความเยื้องศูนย์กลางแบบไดนามิกและแบบคงที่ แท่งโรเตอร์หลวม และข้อผิดพลาดอื่นๆ ที่เกี่ยวข้องกับโรเตอร์สามารถตรวจจับได้
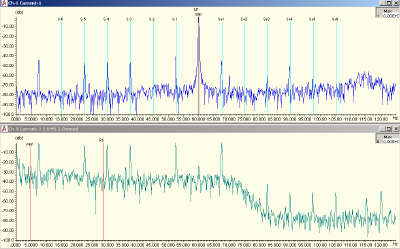
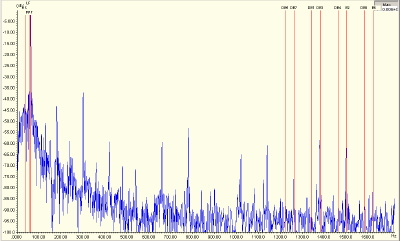
รูปที่ 3: โรเตอร์ถูเมื่อไม่มีโหลด
ข้อมูลในรูปที่ 3 เกี่ยวข้องกับปั๊มจุ่ม 7.5 แรงม้า 1800 รอบต่อนาที ทดสอบแบบแห้งโดยไม่มีโหลด โรเตอร์ถูกับแกนสเตเตอร์เล็กน้อยซึ่งระบุว่ามีความเยื้องศูนย์แบบคงที่และไดนามิกโดยมีกระแสสูงสุดหลายจุดดังที่แสดง
การทดสอบมอเตอร์เหนี่ยวนำ
สามารถประเมินมอเตอร์เฟสเดียวและสามเฟสได้โดยใช้การผสมผสานระหว่างแรงดันและกระแสดีมอดูเลต กฎเฉพาะข้อหนึ่งและจุดแข็งของก
การรวมกันของแรงดันและกระแส กล่าวคือ ถ้าพีคแสดงเป็นแรงดันและกระแส ฟอลต์จะเป็นไฟฟ้าโดยธรรมชาติ ถ้าพีคแสดงเป็นกระแส แต่ไม่ใช่แรงดัน แสดงว่าปัญหานั้นเป็นธรรมชาติทางกล ข้อดีอีกประการหนึ่งในการประเมินระบบด้วย MCSA คือคุณสามารถตรวจจับแหล่งจ่ายไฟและข้อผิดพลาดเกี่ยวกับโหลดได้
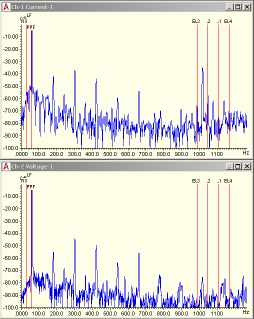
รูปที่ 4: ความผิดพลาดทางกลของสเตเตอร์
ดังที่คุณจะทราบในรูปที่ 4 จุดสูงสุดจะถูกระบุในกระแส แต่ไม่แสดงในแรงดันไฟฟ้า FFT สิ่งนี้บ่งชี้ว่ามีข้อผิดพลาดทางกลอยู่ เนื่องจากเกี่ยวข้องกับความเร็วในการวิ่งและจำนวนช่องของสเตเตอร์ จึงเป็นความผิดปกติทางกลที่เกี่ยวข้องกับขดลวด มีจุดสูงสุดเฉพาะปัจจุบันอื่นๆ อีกหลายจุด ซึ่งบ่งชี้ถึงข้อผิดพลาดที่เกี่ยวข้องกับโหลด ในกรณีนี้ เป็นไปได้มากที่สุดว่าเป็นปัญหาของกระปุกเกียร์ (โปรดทราบว่านี่คือข้อมูลความถี่สูงที่เกี่ยวข้องกับรูปที่ 2)

รูปที่ 5: ความไม่สมดุลทางกล
มอเตอร์ที่แสดงในรูปที่ 5 มีความไม่สมดุลทางกลไก ลายเซ็นจะแสดงเป็นความถี่สองบรรทัด (LF) ความถี่บรรทัดสี่ครั้ง จากนั้นรูปแบบความถี่บรรทัดสองครั้ง ในกรณีนี้ แท่งโรเตอร์จะคูณความเร็วด้วยแถบด้านข้าง LF จากนั้นรูปแบบที่เหลือจะปรากฏขึ้น
การทดสอบมอเตอร์กระแสตรง
มอเตอร์กระแสตรงได้รับการประเมินด้วยวิธีเดียวกันกับการสั่นสะเทือน ตามความเป็นจริง ลายเซ็นจะเหมือนกันในการสั่นสะเทือนเช่นเดียวกับใน MCSA แรงดันและกระแส DC นำมาจากวงจรกระดอง
รูปที่ 6: ข้อผิดพลาดของไดรฟ์ DC
ในกรณีของรูปที่ 6 ความถี่หลายฮาร์มอนิกของความถี่เส้นบวกหลายฮาร์มอนิกของจำนวนอุปกรณ์อิเล็กทรอนิกส์กำลัง (SCR’s) ความถี่เส้น (360 Hz ในกรณีนี้) บ่งชี้ถึงข้อผิดพลาดของ SCR หรือการเชื่อมต่อหลวม สิ่งนี้สามารถยืนยันได้โดยการดูการกระเพื่อมของแรงดันและความถี่ในข้อมูลความถี่ต่ำ
การทดสอบเครื่องกำเนิดไฟฟ้ากระแสสลับแบบซิงโครนัส
กระแสสลับแบบซิงโครนัสสามารถประเมินได้อย่างรวดเร็วและง่ายดายโดยใช้แรงดันและกระแสดีมอดูเลตในปัจจุบัน ในกรณีตัวอย่างต่อไปนี้ ไดชาร์จสะดุดที่อุณหภูมิสูง ใช้ทั้ง MCA และ MCSA ในการประเมินระบบ
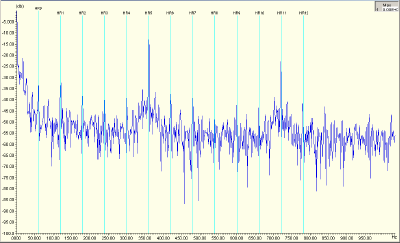
รูปที่ 7: ข้อมูล MCSA บนเครื่องกำเนิดไฟฟ้ากระแสสลับแบบซิงโครนัส (ความถี่ต่ำ)
รูปที่ 8: ความเยื้องศูนย์ไดนามิกของเครื่องกำเนิดไฟฟ้ากระแสสลับ
เครื่องกำเนิดไฟฟ้ากระแสสลับที่กำลังทดสอบแสดงค่าความเยื้องศูนย์ที่เพิ่มขึ้นในช่วงการทดสอบ 40 นาที ความผิดพลาดของสนามหมุน และสัญญาณความผิดปกติทางไฟฟ้าบางอย่าง ข้อมูลนี้ประกอบกับข้อมูล MCA ซึ่งระบุขดลวดสั้น สายเคเบิลสั้น และความต้านทานของฉนวนลดลงอย่างมากในช่วงโหลดชิ้นส่วนสั้น เครื่องกำเนิดไฟฟ้ากระแสสลับคือเครื่องกำเนิดไฟฟ้ากระแสสลับขนาด 475 กิโลวัตต์ 480 Vac ซึ่งต้องใช้สายเคเบิลขนานกันสามเส้นต่อเฟส มีตัวเลือกมากมายสำหรับระบบ ATPOL สำหรับสายเคเบิลขนาดใหญ่ อย่างไรก็ตาม ในชั่วพริบตา มีการใช้สายเคเบิลหนึ่งในสามสายของแต่ละเฟส ดังนั้นค่าปัจจุบันจึงอยู่ที่ประมาณ 1 ใน 3

รูปที่ 9: การเชื่อมต่อกระแสไฟสำหรับอัลเทอร์เนเตอร์
ไดรฟ์ความถี่ตัวแปร
ไดรฟ์แบบปรับความถี่ได้เป็นสิ่งที่ท้าทายสำหรับระบบ MCSA หลายระบบ อย่างไรก็ตามในกรณีของ ATPOL นี่ไม่ใช่ปัญหา สามารถดูสัญญาณแรงดันเอาต์พุตและกระแสได้ (รูปที่ 10)
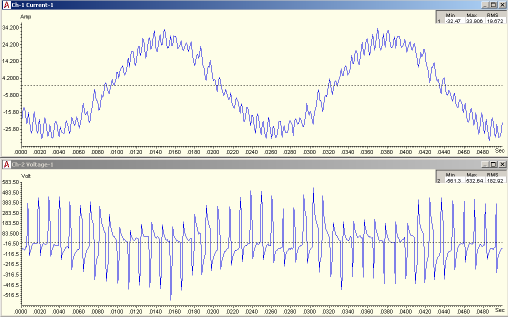
รูปที่ 10: แรงดัน VFD และรูปคลื่นปัจจุบัน (0.05 วินาทีจับภาพ)
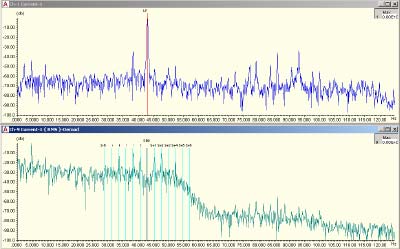
รูปที่ 11: ข้อมูลความถี่ต่ำ VFD
ในรูปที่ 11 ซึ่งเป็นความถี่ต่ำ (< 120 Hz) ข้อมูลสำหรับระบบเดียวกันกับรูปที่ 10 แสดงว่าความถี่สายเอาต์พุตของไดรฟ์คือ 43 Hz และความเร็วการทำงานของมอเตอร์ 3600 RPM คือ 2570 RPM
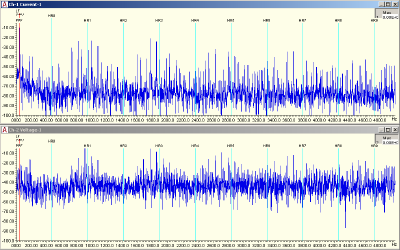
รูปที่ 12: ข้อมูลความถี่สูง VFD
ดังที่สามารถสังเกตได้ในรูปที่ 12 แรงดันไฟฟ้าแรงสูงและกระแสไฟสูงสุดบ่งชี้ถึงความผิดปกติที่เกี่ยวข้องกับระบบมอเตอร์ เสียงรบกวนเพิ่มเติมบางส่วนเกิดจากแรงดันและรูปคลื่นกระแสที่มาจาก VFD อย่างไรก็ตาม ซอฟต์แวร์จะวางเคอร์เซอร์ที่เกี่ยวข้องกับความผิดปกติต่างๆ ในรูปคลื่นโดยอัตโนมัติ
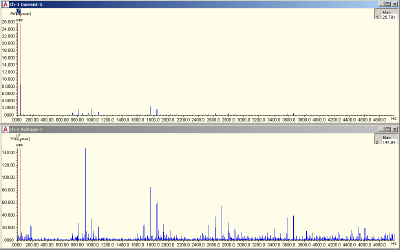
รูปที่ 13: การวิเคราะห์พิเศษในค่าสูงสุด
รูปที่ 13 แสดงข้อมูลเดียวกัน แต่แสดงแรงดันและกระแสสูงสุด กระแสความถี่ที่สูงขึ้นบ่งชี้ถึงปัญหาที่เกี่ยวข้องกับฮาร์มอนิกของแรงดันไฟฟ้า ซึ่งแสดงในรูปคลื่นด้านล่าง ข้อมูลทั้งหมดที่รวมกันแสดงปัญหาที่เกี่ยวข้องกับแรงดันไฟฟ้าขาเข้า เมื่อทดสอบที่ 46 Hz ปัญหาจะมีนัยสำคัญมากขึ้นและชี้ไปที่ข้อผิดพลาดที่อาจเกิดขึ้นกับระบบจ่ายไฟที่แพร่หลายมากกว่า 45 Hz
วิธีแก้ปัญหาจะบรรเทาลงได้ด้วยการกรองที่ใช้กับเอาต์พุตไดรฟ์ VFD
Punch Press พร้อมมอเตอร์และ Eddy-Current Drive
สามารถดูระบบมอเตอร์ทั้งหมดรวมถึงโหลดที่ขับเคลื่อนได้
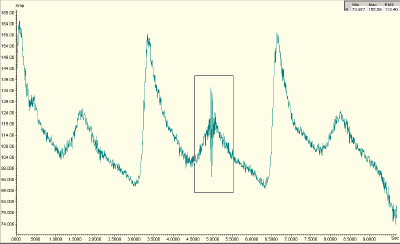
รูปที่ 14: รอบการโหลดของ Punch Press
รูปที่ 14 แสดงรอบปัจจุบันใน 10 วินาที จุดสูงสุด A เป็นหนึ่งในสามจุดสูงสุดในรอบนี้ที่เกี่ยวข้องกับหมัด (ด้านล่าง) ของจังหวะการกด ในขณะที่จุด C เกี่ยวข้องกับจุดสูงสุดของจังหวะ จุด B ระบุประเภทของปัญหาการถูหรือการคว้าในขณะที่ระบบเข้าใกล้จุดสูงสุดของจังหวะ จังหวะด้านล่างสามจังหวะช่วยระบุว่าการดำเนินการเกิดขึ้น 18 ครั้งต่อนาที
รูปที่ 15: Sidebands ความถี่ของสายที่เกี่ยวข้องกับมอเตอร์
รูปที่ 15 ระบุ ‘จุดรบกวน’ ที่สูงและแถบด้านข้างจำนวนมากรอบๆ ความถี่ LF สูงสุด ข้อมูลนี้พร้อมกับข้อมูลความถี่สูงช่วยในการชี้ทิศทางไปยังโหลด
รูปที่ 16: ข้อมูลความถี่สูงของคลัตช์กระแสไหลวน
รูปที่ 16 ระบุว่ามีการเชื่อมต่อและ/หรือข้อผิดพลาด SCR อยู่ในแรงดันไฟฟ้า DC ที่จ่ายจากวงจรเรียงกระแส (SCR หกตัว) ยอดเขาสูง
สเปกตรัมความถี่ยังระบุข้อผิดพลาดในไดรฟ์กระแสไหลวนและตัวหมัดกดเอง ซึ่งน่าจะเกิดการหลวมในระบบ (ลายเซ็นที่เกี่ยวข้องแสดงระดับเสียงรบกวนที่เพิ่มขึ้น)
MCSA และการประยุกต์ใช้พลังงาน
คุณลักษณะการรายงานอัตโนมัติและการบันทึกข้อมูลของระบบ ATPOL ยังรวมถึงความสามารถในการทำงานร่วมกับซอฟต์แวร์ MotorMaster Plus ของกระทรวงพลังงานสหรัฐฯ
คุณสมบัติเพิ่มเติมได้รับการสนับสนุนสำหรับการรวมไว้ใน MotorMaster Plus โดย ALL-TEST Pro, Dreisilker Electric Motors และ Pruftechnik เพื่อให้รวมข้อมูลการวินิจฉัยมอเตอร์สำหรับการวิเคราะห์ การใช้ทั้ง MCA และ MCSA ช่วยให้ผู้ใช้สามารถประเมินสภาพของมอเตอร์ไฟฟ้า จากนั้นทำการซ่อมแซมที่เกี่ยวข้องกับพลังงานแทนที่จะตัดสินใจเปลี่ยนด้วยผลตอบแทนจากการลงทุนที่ยืนยันได้
ตัวอย่างเช่น มอเตอร์ 40 แรงม้า 1800 รอบต่อนาทีที่ทดสอบกับ MCSA ระบุข้อผิดพลาดทางกลและทางไฟฟ้าบางประการ ข้อมูลดังกล่าวรวมอยู่ในรายงาน MotorMaster Plus และกำหนดความถี่ในการทำงานว่ามีประสิทธิภาพ 91.5% ที่โหลด 90% สมมติว่าต้นทุนด้านพลังงานอยู่ที่ 0.07 ดอลลาร์/กิโลวัตต์ชั่วโมง และความต้องการ 14 ดอลลาร์/กิโลวัตต์ โดยมีการทำงาน 2,000 (1 กะ) ต่อปี มอเตอร์ไฟฟ้าที่มีประสิทธิภาพระดับพรีเมียมทดแทนได้รับการระบุด้วยการคืนทุนอย่างง่าย 0.9 ปี และ 866% หลังการคืนภาษีจากการลงทุน
นอกจากนี้ยังสามารถใช้ข้อมูลโดยเครื่องมือประเมินระบบปั๊ม (PSAT), AirMaster และเครื่องมืออื่นๆ ของกระทรวงพลังงานสหรัฐฯ
กำลังการวินิจฉัยมอเตอร์ – ระบบ ALL-TEST PRO MD
พลังรวมของ MCA และ MCSA ที่มีอยู่ในชุด ALL-TEST PRO MD ซึ่งผสานรวมผ่านระบบซอฟต์แวร์การจัดการมอเตอร์ EMCAT ช่วยให้
ผู้ใช้เพื่อดำเนินการต่อไปนี้:
- การวิเคราะห์อัตโนมัติของทั้งข้อมูล MCA และ MCSA
- การคำนวณคืนทุนผ่านระบบซอฟต์แวร์ Power System Manager และ MotorMaster Plus
- การว่าจ้างเครื่องจักรไฟฟ้า
- การแก้ไขปัญหาเครื่องจักรไฟฟ้า
- แนวโน้มของเครื่องจักรไฟฟ้า
- การวิเคราะห์สาเหตุที่แท้จริงของเครื่องจักรไฟฟ้า
- มุมมองระบบไฟฟ้าและเครื่องกลที่สมบูรณ์
- การประเมินระบบ AC/DC โหลดผ่านระบบ ‘ข้อต่ออ่อน’ (เช่น: ไดรฟ์กระแสไหลวน)
- การศึกษาและสำรวจพลังงาน
- รองรับเทคโนโลยีการวินิจฉัยอื่นๆ เช่น การสั่นสะเทือน อินฟราเรด และอื่นๆ
ทั้งหมดผ่านระบบการวินิจฉัยมอเตอร์อย่างง่าย สามารถรวบรวมข้อมูลได้โดยใช้ตัวรวบรวมข้อมูลแบบมือถือหรือผ่านความสามารถ ‘การทำงานระยะไกล’ ผ่านคอมพิวเตอร์หรือแล็ปท็อป (สามารถใช้งานระบบจากระยะไกลจากหน้าจอคอมพิวเตอร์)
บทสรุป
เอกสารไวท์เปเปอร์ ALL-TEST Pro นี้มีวัตถุประสงค์เพื่อนำเสนอความสามารถของ MCSA ของระบบวินิจฉัยมอเตอร์ ALL-TEST PRO MD
ความสามารถดังที่แสดงให้เห็น นอกเหนือไปจากการวิเคราะห์อย่างง่ายของมอเตอร์เหนี่ยวนำ และรวมถึง:
- มอเตอร์ไฟฟ้ากระแสสลับและเครื่องกำเนิดไฟฟ้ากระแสสลับ
- มอเตอร์กระแสตรงและเครื่องกำเนิดไฟฟ้า
- ระบบเฟสเดียวและสามเฟส
- ไดรฟ์ Eddy-Current
- ไดรฟ์ความถี่ตัวแปร
- คุณภาพไฟฟ้าขาเข้า
- ขับเคลื่อนโหลด
- ล้นหลาม
ความสามารถไปไกลเกินกว่าที่อ้างถึงในบทความนี้
เอกสารเพิ่มเติมจะถูกนำเสนอเพื่อระบุโอกาสโดยใช้คุณภาพไฟฟ้า, MCA, MCSA และการตรวจจับข้อผิดพลาดที่เกี่ยวข้องกับโหลด

AT34™
วิเคราะห์และแนวโน้มความสมบูรณ์ของส่วนประกอบมอเตอร์สำหรับความผิดปกติของกราวด์ ความผิดปกติของขดลวดภายใน การเชื่อมต่อแบบเปิด และการปนเปื้อน – ทั้งหมดนี้ทำได้ด้วยอุปกรณ์มือถือเครื่องเดียว

