ข้อดีของการทดสอบมอเตอร์กระแสตรงโดยใช้การวิเคราะห์วงจรมอเตอร์
การทดสอบทางไฟฟ้าของมอเตอร์ไฟฟ้ากระแสตรง (DC) ถือเป็นความท้าทายในอุตสาหกรรม การผลิต และศูนย์ซ่อม ประเด็นสำคัญเกี่ยวข้องกับความสามารถในการเปรียบเทียบขดลวดหนึ่งกับขดลวดถัดไป หากไม่มีข้อมูลที่แน่นอน ในบทความนี้จะกล่าวถึงประเด็นของการทดสอบอย่างง่ายเพื่อเพิ่มความมั่นใจในการทดสอบและสรุปผลการวิเคราะห์โดยใช้การวิเคราะห์วงจรมอเตอร์ (MCA)
คำว่า MCA มาจากวิธีการทดสอบที่ให้ข้อมูลเกี่ยวกับส่วนประกอบพื้นฐานของมอเตอร์ไฟฟ้ากระแสสลับหรือกระแสตรง ส่วนประกอบพื้นฐานเหล่านี้ประกอบด้วย:
- ความต้านทานวัดเป็นโอห์ม
- ความต้านทาน วัดเป็นโอห์ม
- ความเหนี่ยวนำ วัดในหน่วยเฮนรีส์
- มุมเฟสของขดลวดเหนี่ยวนำ วัดเป็นองศา
- ความต้านทานของฉนวน วัดเป็นเมกะโอห์ม
เครื่องมือที่จะกล่าวถึงในบทความนี้ให้การอ่านเหล่านี้โดยการสร้างแรงดันไฟฟ้าต่ำ คลื่นไซน์จริง กระแสสลับ (อิมพีแดนซ์ ความเหนี่ยวนำ มุมเฟส) สัญญาณที่ความถี่ตั้งแต่ 100 ถึง 800 เฮิรตซ์ สัญญาณ DC แรงดันต่ำสำหรับ ความต้านทานไฟฟ้ากระแสตรง 500 หรือ 1,000 โวลต์ สำหรับการทดสอบความต้านทานของฉนวน
นอกจากนี้ ยังมีการทดสอบพิเศษที่เรียกว่า I/F ซึ่งความถี่ที่ใช้เป็นสองเท่า และอัตราส่วนเป็นผลมาจากการเปลี่ยนแปลงของอิมพีแดนซ์ของขดลวด การทดสอบนี้ใช้เพื่อระบุกางเกงขาสั้นที่ม้วนเร็วซึ่งอาจมีอยู่ในม้วน เมื่อใช้ข้อมูลที่นำไปใช้ เงื่อนไขของขดลวดมอเตอร์กระแสตรงสามารถประเมินได้ผ่านการเปรียบเทียบขดลวด การเปรียบเทียบกับค่าที่อ่านได้ หรือโดยแนวโน้มการเปลี่ยนแปลงของขดลวดในช่วงระยะเวลาหนึ่ง
มอเตอร์ไฟฟ้ากระแสตรงที่จะรวมอยู่ในบทความนี้ ได้แก่ มอเตอร์กระแสตรงแบบอนุกรม, สับเปลี่ยน และมอเตอร์กระแสตรงแบบผสม การทดสอบพื้นฐานบางส่วนที่อธิบายไว้สามารถทำได้กับแม่เหล็กถาวร เซอร์โวกระแสตรง เครื่องมือกลกระแสตรง และอื่นๆ (แม้ว่ามอเตอร์กระแสตรงแบบไร้แปรงถ่านจะได้รับการประเมินในลักษณะเดียวกันกับมอเตอร์กระแสสลับ) ประเภทของมอเตอร์ไฟฟ้ากระแสตรงสามารถอธิบายได้จากขดลวดและการเชื่อมต่อ
ทฤษฎีมอเตอร์กระแสตรง
มอเตอร์ไฟฟ้ากระแสตรงทำงานภายใต้หลักการพื้นฐานของไฟฟ้า: อันตรกิริยาระหว่างสนามแม่เหล็กสองสนามที่วางทำมุมจากกันจะดึงดูด/ผลักกันทำให้เกิดการเคลื่อนที่ ในกรณีของมอเตอร์ไฟฟ้ากระแสตรง พลังงานจะถูกส่งไปยังสนามสเตเตอร์และอาร์เมเจอร์ซึ่งสร้างสนามแม่เหล็กซึ่งทำมุมกันทางไฟฟ้าประมาณ 90 องศา ผลของการดึงดูด/แรงผลักของกระดองจากสนามจะสร้างแรงบิดและกระดองจะหมุน
ส่วนประกอบพื้นฐานของมอเตอร์ไฟฟ้ากระแสตรงประกอบด้วย:
- กรอบ – ประกอบขึ้นเป็นโครงสร้างภายนอกของเครื่อง ใช้สำหรับยึดส่วนประกอบอื่นๆ ของมอเตอร์เป็นส่วนใหญ่
- สนาม – คือขดลวดที่ติดตั้งอยู่บนชิ้นส่วนขั้วสนามซึ่งสร้างสนามแม่เหล็กที่อยู่นิ่ง
- อินเตอร์โพล – คือคอยล์ที่วางอยู่ระหว่างคอยล์สนามซึ่งสร้างสนามที่ใช้เพื่อป้องกันประกายไฟของแปรงมากเกินไป
- แผงปิดท้าย – เรียกอีกอย่างว่าตัวเรือนแบริ่ง ใช้สำหรับวางแปรง และชุดแปรง และเพื่อวางแบริ่งเพลา โดยยึดกระดองไว้ตรงกลางเฟรม
- แปรงเสื้อผ้า – ถือและจัดตำแหน่งแปรงเหนือตัวสับเปลี่ยนกระดอง โดยปกติจะใช้อุปกรณ์ปรับความตึงเพื่อรักษาแรงกดบนแปรงให้คงที่
- แปรง – สิ่งเหล่านี้ใช้เพื่อจ่าย DC ให้กับกระดอง แปรงจะขี่บนเครื่องสับเปลี่ยน
- ตัวสับเปลี่ยน – ประกอบด้วยแท่งทองแดงจำนวนมากที่คั่นด้วยไมกา แต่ละแถบเชื่อมต่อกับขดลวดในกระดอง
- กระดอง – นี่คือส่วนที่หมุนของมอเตอร์ที่มีขดลวด
ซึ่งแตกต่างจากมอเตอร์ AC ส่วนใหญ่ มอเตอร์ DC ต้องการพลังงานแยกต่างหากเพื่อจ่ายให้กับทั้งสนามและกระดอง DC ที่ให้กับฟิลด์สเตเตอร์จะสร้างชุดของฟิลด์ทิศเหนือและทิศใต้คงที่ DC ที่ให้กับอาร์เมเจอร์จะสร้างฟิลด์เหนือและใต้ที่มีองศาไฟฟ้า 90 องศาจากฟิลด์ที่อยู่นิ่ง
ในขณะที่กระดองสร้างแรงบิดและเคลื่อนไปยังขั้วเหนือหรือขั้วใต้ที่เหมาะสม แปรงจะเปลี่ยนตำแหน่งบนตัวสับเปลี่ยน โดยจ่ายพลังงานให้กับขดลวดอีกชุดที่ 90 องศาไฟฟ้าจากสนามที่อยู่นิ่ง สิ่งนี้ทำให้กระดองเป็นส่วนประกอบของกระแสสลับเนื่องจากกระแสจะเคลื่อนที่ไปในทิศทางเดียวโดยขึ้นอยู่กับตำแหน่งของแปรง จากนั้นไปในทิศทางอื่นเมื่อมอเตอร์ทำงาน
แปรงถูกตั้งค่าในตำแหน่งที่ “เป็นกลาง” ทางไฟฟ้า (ไม่มีกระแสไฟฟ้าเหนี่ยวนำจากสนามสเตเตอร์) เพื่อลดการเกิดประกายไฟ ในการเชื่อมต่อมอเตอร์กระแสตรงส่วนใหญ่ โดยการเปลี่ยนแปลงแรงดันกระดอง ความเร็วในการทำงานอาจเปลี่ยนแปลงได้ อันตรายทั่วไปประการหนึ่งที่มีอยู่ในมอเตอร์กระแสตรงคือถ้ากระแสไฟสนามหายไปในขณะที่กระแสกระดองยังคงอยู่ มอเตอร์อาจหลุดออกและความเร็วจะเพิ่มขึ้นจนกระทั่งกระดองทำลายตัวเอง
ขดลวดพื้นฐานสามประเภทที่สามารถใช้เพื่อระบุประเภทของมอเตอร์กระแสตรง ได้แก่ :
- ซีรีส์: มักพบในงานที่ต้องการแรงบิดเริ่มต้นสูง ประกอบด้วยชุดของขดลวดสนามที่มีเส้นลวดขนาดใหญ่และมีรอบค่อนข้างน้อย มีเครื่องหมาย S1 และ S2 ซึ่งเชื่อมต่อเป็นอนุกรมกับอินเตอร์โพลและอาร์มาเจอร์ โดยมีเครื่องหมาย A1 และ A2 (ดูรูปที่ 1) มอเตอร์ที่ต่อแบบอนุกรมมักจะใช้เป็นมอเตอร์ฉุดและมีความต้านทานพื้นฐานต่ำมาก
- Shunt : ปกติจะพบในการใช้งานที่ต้องการความเร็วคงที่ ประกอบด้วยชุดขดลวดสนามที่ทำจากลวดขนาดเล็กที่มีหลายรอบ โดยมีเครื่องหมาย F1 และ F2 สำหรับแรงดันไฟฟ้าเดี่ยว และ F1, F2, F3 และ F4 สำหรับแรงดันไฟฟ้าคู่ และ A1 และ A2 สำหรับอินเตอร์โพลและกระดอง (ดูรูปที่ 2) มอเตอร์ที่เชื่อมต่อแบบสับเปลี่ยนโดยปกติจะใช้เป็นมอเตอร์เครนและมอเตอร์เครื่องมือกล และมีความต้านทานพื้นฐานค่อนข้างสูง
- Compound : รวมคุณประโยชน์ของมอเตอร์ทั้งแบบซีรีส์และแบบชาวน์ดเข้าด้วยกัน พวกมันให้แรงบิดที่ค่อนข้างสูงพร้อมความต้านทานพื้นฐานต่อการเปลี่ยนแปลงของความเร็วในการทำงาน การเชื่อมต่อจะรวมทั้งการเชื่อมต่อแบบอนุกรมและการแบ่ง (ดูรูปที่ 3) มอเตอร์แบบผสมเป็นสิ่งที่พบได้บ่อยที่สุดและพบได้ทั่วไปในอุตสาหกรรมการผลิต
อย่างที่คุณเห็น มีคอยล์น้อยสำหรับเปรียบเทียบกันในเครื่อง DC ที่ประกอบแล้ว อย่างไรก็ตาม สามารถพัฒนาขั้นตอนสำหรับการทดสอบการพันขดลวดที่ให้ความมั่นใจผลการทดสอบในระดับสูงได้
ข้อผิดพลาดทางไฟฟ้าของมอเตอร์ DC ทั่วไป
มีข้อผิดพลาดทางไฟฟ้าของมอเตอร์ DC ทั่วไปจำนวนหนึ่ง ซึ่งโดยทั่วไปจะอธิบายไว้ที่นี่ สิ่งเหล่านี้เป็นผลมาจากปัญหาเฉพาะของการออกแบบมอเตอร์กระแสตรงอันเป็นผลจากอุณหภูมิ แรงเสียดทาน และการปนเปื้อนภายใน เช่น คาร์บอนหรือกราไฟท์
สาเหตุที่พบบ่อยที่สุดประการหนึ่งของความผิดปกติของการพันขดลวดในมอเตอร์กระแสตรงคือการปนเปื้อนของขดลวดจากคาร์บอนหรือฝุ่นกราไฟต์ (คาร์บอน) จากแปรง ผงละเอียดจะซึมผ่านขดลวดที่อยู่นิ่งและหมุนทั้งหมด และจะสร้างเส้นทางระหว่างตัวนำหรือระหว่างตัวนำไปยังกราวด์ คาร์บอนมักจะติดอยู่และปัญหาจะรุนแรงขึ้นอีกโดยการทำความสะอาดและบำรุงรักษาเมื่อคาร์บอนถูกเป่าด้วยอากาศอัด หรือทำความสะอาดและอบกระดอง ไม่ว่าในกรณีใด คาร์บอนอาจจับตัวกันแน่นตามมุมต่างๆ ซึ่งมักจะอยู่ด้านหลังคอมมิวเตเตอร์ สิ่งนี้จะจบลงด้วยความผิดพลาดของกราวด์หรือการเลี้ยวขวาที่การเชื่อมต่อคอมมิวเตเตอร์
ข้อผิดพลาดทั่วไปอีกประการหนึ่งที่มักไม่พิจารณาคือการระบายความร้อนของเครื่อง DC สิ่งนี้อาจเกิดขึ้นเนื่องจากการปิดกั้นทางเดินระบายความร้อน กระดองเปิดช้าเกินไปโดยไม่มีการระบายความร้อนเพิ่มเติม หรือจากตัวกรองที่สกปรก (ข้อผิดพลาดที่เกี่ยวข้องกับการระบายความร้อนที่พบบ่อยที่สุด) อุณหภูมิเป็นศัตรูตัวฉกาจของอุปกรณ์ไฟฟ้า โดยเฉพาะระบบฉนวน ซึ่งอายุการใช้งานจะลดลงครึ่งหนึ่งสำหรับอุณหภูมิที่เพิ่มขึ้นทุกๆ 10 องศาเซนติเกรด (กฎทั่วไปที่ยอมรับ) เมื่อฉนวนอ่อนตัวลง ความน่าเชื่อถือของฉนวนก็จะลดลงจนเกิดความผิดพลาดที่คดเคี้ยวระหว่างรอบ นอกจากระบบฉนวนจะเสื่อมสภาพแล้ว แปรงถ่านยังเสื่อมสภาพเร็วขึ้น ทำให้คอมมิวเตเตอร์สึกหรอมากขึ้น และมีการปนเปื้อนของคาร์บอนเพิ่มเติมที่ขดลวด
ความผิดปกติอีกประการหนึ่งที่เกี่ยวข้องกับความร้อนนั้นเกิดจากการฝึกฝนที่มีสนามพลังด้วยกระดองที่เหลือ (ไม่มีพลังงาน) นี่คือโหมดการทำงานทั่วไปที่ต้องใช้โบลเวอร์แยกต่างหากเพื่อให้ความเย็นแก่มอเตอร์ ซึ่งปกติแล้วจะมีตัวกรองที่ต้องรักษาความสะอาด ข้อผิดพลาดประเภทนี้มักส่งผลให้ขดลวดสับเปลี่ยนสั้นลง ความสามารถของมอเตอร์ในการผลิตแรงบิดลดลง และอาจจบลงด้วยสภาวะที่เป็นอันตรายของกระดองเกินความเร็วหากไม่บำรุงรักษาอย่างเหมาะสม
ตัวสับเปลี่ยนยังเปิดโอกาสให้เกิดข้อผิดพลาด เช่นเดียวกับตัวบ่งชี้การทำงานและสภาพของมอเตอร์ มอเตอร์กระแสตรงที่ทำงานอย่างถูกต้องจะมีการเคลือบคาร์บอนที่ละเอียดบนตัวสับเปลี่ยนโดยที่แถบจะดูสม่ำเสมอ แถบสับเปลี่ยนไหม้ กระจกเป็นริ้ว คาร์บอนหนา หรือสภาพสับเปลี่ยนร้อนเกินไป บ่งชี้ถึงปัญหาที่อาจเกิดขึ้นซึ่งควรได้รับการแก้ไข
การทดสอบกระดอง
เกราะ DC เป็นส่วนประกอบที่ใช้เวลานานที่สุดแต่ทดสอบได้ง่ายที่สุด มีสามวิธีพื้นฐานที่จะแนะนำ: แนวโน้ม; ล้อม; และถอดประกอบ ในกรณีที่มีแนวโน้มเกิดขึ้น การวัดทั้งหมดจะถูกนำมาใช้ อย่างไรก็ตาม ในกรณีของการทดสอบแบบประกอบและแยกชิ้นส่วน จะใช้การวัดอิมพีแดนซ์แบบบาร์ต่อบาร์ ดูอิมพีแดนซ์เนื่องจากอาร์มาเจอร์เป็นส่วนประกอบไฟฟ้ากระแสสลับ และการวัดค่าความต้านทานอย่างง่ายอาจพลาดข้อผิดพลาดบางอย่าง รวมทั้งการลัดวงจรและกราวด์ แนวโน้มจะได้รับการตรวจสอบในขั้นตอนแนวโน้มโดยรวมสำหรับมอเตอร์กระแสตรงในบทความนี้
เมื่อทดสอบชุดกระดองมอเตอร์ DC ที่ประกอบแล้ว วิธีที่ดีที่สุดคือดำเนินการสิ่งที่เรียกกันทั่วไปว่าเป็นการทดสอบแบบแท่งต่อแท่งโดยใช้แปรงมอเตอร์ ในกรณีของมอเตอร์ไฟฟ้ากระแสตรงที่มีแปรงสองชุด ไม่จำเป็นต้องยกแปรงใด ๆ ขึ้น ในกรณีของมอเตอร์ไฟฟ้ากระแสตรงที่มีแปรงตั้งแต่สี่ชุดขึ้นไป จะต้องยกชุดทั้งหมดยกเว้นสองชุดโดยทำมุม 90 องศาจากกัน ซึ่งนำพวกเขาออกจากวงจรการทดสอบ ตรวจสอบให้แน่ใจว่ามีการสัมผัสที่ดีบนตัวสับเปลี่ยนโดยให้แน่ใจว่า 90%+ ของแปรงสัมผัสกับแถบสับเปลี่ยนและแถบสับเปลี่ยนสะอาด หากไม่สะอาด ให้ขัดกระดองเบา ๆ โดยใช้วิธีที่ได้รับอนุมัติก่อนทำการทดสอบ หากตัวสับเปลี่ยนมีการสึกหรอไม่ดี จะต้องถอดชิ้นส่วนและตัวสับเปลี่ยนจะ “หมุนและตัดราคา” ซึ่งในกรณีนี้ การทดสอบแบบชิ้นต่อชิ้นแบบแยกชิ้นส่วนจะเหมาะสม เมื่อตั้งค่าแล้ว ให้ทำเครื่องหมายที่ตำแหน่งของแถบหนึ่งบนตัวสับเปลี่ยน จากนั้นนำแถบไปยังตำแหน่งที่อยู่ใต้ขอบนำของแปรงตัวใดตัวหนึ่ง ในการทดสอบประกอบ คุณอาจจะทาแปรงอย่างน้อยหนึ่งแท่งครึ่งแท่ง ทำการทดสอบอิมพีแดนซ์ ทำเครื่องหมายค่าที่อ่านได้ และย้ายกระดองเพื่อให้ขอบนำของแปรงอยู่เหนือแถบสับเปลี่ยนถัดไป อ่านค่าอิมพีแดนซ์ถัดไปและดำเนินการต่อจนกว่าแต่ละแถบจะได้รับการทดสอบ ผลลัพธ์ที่ดีจะแสดงรูปแบบที่สอดคล้องกัน ในขณะที่รูปแบบที่ไม่สอดคล้องกันจะระบุถึงเกราะที่ไม่ดี
การทดสอบแบบแท่งต่อแท่งแบบแยกส่วนนั้นคล้ายกับการทดสอบแบบประกอบ ยกเว้นว่าเกราะจะอยู่นอกเฟรมและผู้ทดสอบสามารถเข้าถึงตัวสับเปลี่ยนได้อย่างเต็มที่ ในกรณีนี้ ผู้ทดสอบจะใช้ฟิกซ์เจอร์กระดองหรือสายวัดทดสอบเพื่อเชื่อมต่อจากแท่งหนึ่งไปยังอีกแท่งหนึ่ง ระยะห่างระหว่างการอ่านอิมพีแดนซ์แต่ละครั้งควรคงที่และห่างจากกันประมาณ 90 ถึง 180 องศา แถบแรกควรทำเครื่องหมายไว้และการทดสอบดำเนินต่อไปจนกระทั่งขาข้างหนึ่งของฟิกซ์เจอร์ทดสอบหรือสายวัดทดสอบทำให้หมุนได้ 360 องศารอบตัวสับเปลี่ยน ทำเครื่องหมายอิมพีแดนซ์สำหรับการทดสอบแบบแท่งต่อแท่งแต่ละครั้ง จากนั้นดูให้แน่ใจว่ามีรูปแบบที่สอดคล้องกัน
การทดสอบมอเตอร์ซีรีส์
มอเตอร์ไฟฟ้าซีรีส์เป็นสิ่งที่ท้าทายมากในการแก้ปัญหาเนื่องจากไม่มีชุดของฟิลด์ให้เปรียบเทียบ การอ่านอาจนำมาจาก S1 ถึง S2 และ A1 ถึง A2 จากนั้นจึงมีแนวโน้มเมื่อเวลาผ่านไปหรือเปรียบเทียบกับเครื่องอื่นที่คล้ายคลึงกัน
เมื่อมีแนวโน้มการอ่านเมื่อเวลาผ่านไป การอ่านค่าความต้านทานอย่างง่ายจะต้องได้รับการแก้ไขสำหรับอุณหภูมิ ซึ่งโดยปกติจะสัมพันธ์กับ 25 o C โดยปกติแล้วอิมพีแดนซ์และค่าความเหนี่ยวนำจะมีการเปลี่ยนแปลงจำกัดเนื่องจากอุณหภูมิ ในขณะที่มุมเฟสและค่า I/F ที่อ่านได้จะคงที่โดยไม่คำนึงถึงอุณหภูมิ การเปลี่ยนแปลงของ I/F และมุมเฟสจะบ่งบอกถึงการเลี้ยวที่สั้น ในขณะที่การเปลี่ยนแปลงของอิมพีแดนซ์และอินดักแตนซ์โดยปกติจะบ่งชี้ว่าขดลวดสกปรก
การเปรียบเทียบเช่นมอเตอร์จะต้องมีข้อมูลเพิ่มเติม ผู้ปฏิบัติงานจะต้องตรวจสอบให้แน่ใจว่ามอเตอร์นั้นมาจากผู้ผลิตและการออกแบบเดียวกัน รวมถึงความเร็ว กำลัง ฯลฯ มอเตอร์ “รุ่น” จะต้องเป็นมอเตอร์ใหม่หรือสร้างใหม่ตามข้อกำหนดเฉพาะของผู้ผลิตเดิม เมื่อทำการอ่านค่าเปรียบเทียบ อุณหภูมิในการทดสอบควรใกล้เคียงกันระหว่างมอเตอร์หนึ่งถึงมอเตอร์ อย่างไรก็ตาม สามารถเปรียบเทียบการอ่าน I/F และมุมเฟสได้โดยตรง การอ่านเหล่านี้ไม่ควรเปลี่ยนมากกว่า +/- 2 จุดสำหรับ I/F และ +/-1 องศาสำหรับมุมเฟส ข้อผิดพลาดทั่วไปเมื่อมีการสร้างขดลวดสนามแบบอนุกรมขึ้นมาใหม่ แม้ว่าจะพบได้น้อยกว่าขดลวดแบบแบ่ง แต่เป็นการเปลี่ยนขนาดสายไฟที่ไม่ถูกต้อง ซึ่งจะส่งผลต่อความสามารถของมอเตอร์ในการสร้างแรงบิด
การทดสอบมอเตอร์ปัด
มอเตอร์แบบแบ่งแรงดันคู่ให้ความสามารถในการเปรียบเทียบขดลวดสองชุด ในขณะที่มอเตอร์แบบแรงดันเดียวจะมีขั้นตอนการทดสอบเดียวกันกับการทดสอบขดลวดของมอเตอร์แบบอนุกรม โดยใช้ F1 ถึง F2 แทนที่จะเป็น S1 ถึง S2
ด้วยแรงดันไฟฟ้าคู่ ขดลวดแบ่งจะมีป้ายกำกับว่า F1 ถึง F2 และ F3 ถึง F4 ทำให้นักวิเคราะห์สามารถทดสอบและเปรียบเทียบขดลวดสองชุดนี้ได้
เมื่อทำการทดสอบและแก้ไขปัญหาการอ่านเมื่อเวลาผ่านไป การอ่านค่าความต้านทานอย่างง่ายจะต้องได้รับการแก้ไขสำหรับอุณหภูมิ ซึ่งโดยปกติจะสัมพันธ์กับ 25 o C อิมพีแดนซ์และค่าความเหนี่ยวนำจะเปลี่ยนแปลงมากกว่ามอเตอร์แบบพันแผลเนื่องจากค่าความต้านทานอย่างง่ายของวงจรที่สูงขึ้น มุมเฟสและ I/F จะคงที่ภายใน 1 ถึง 2 จุด โดยไม่คำนึงถึงอุณหภูมิ การเปลี่ยนแปลงของ I/F และมุมเฟสจะบ่งบอกถึงการเลี้ยวที่สั้น ในขณะที่การเปลี่ยนแปลงของอิมพีแดนซ์และอินดักแตนซ์โดยปกติจะบ่งชี้ว่าขดลวดสกปรก การเปรียบเทียบระหว่าง F1 ถึง F2 และ F3 ถึง F4 ควรมีความต้านทาน ตัวเหนี่ยวนำ และอิมพีแดนซ์น้อยกว่า 3% และต่างกันไม่เกิน 1 จุดใน I/F หรือมุมเฟส
เช่นเดียวกับมอเตอร์ที่สามารถทดสอบและเปรียบเทียบได้เช่นเดียวกับมอเตอร์แบบซีรีย์ เมื่อเป็นไปได้ ควรทดสอบมอเตอร์เมื่ออ่านค่าแนวโน้ม ที่อุณหภูมิเดียวกับการทดสอบครั้งก่อน ตัวอย่างเช่น ภายในไม่กี่นาทีหลังจากปิดอุปกรณ์ที่ใช้งานหรือก่อนเริ่มอุปกรณ์ สิ่งนี้ทำให้สามารถทำการทดสอบที่อุณหภูมิเดียวกันได้
การทดสอบมอเตอร์กระแสตรงแบบผสม
การทดสอบในสถานที่ แนวโน้มและการแก้ไขปัญหาทำได้ง่ายกว่ามากด้วยมอเตอร์แบบผสม มอเตอร์ผสมแรงดันไฟฟ้าเดี่ยวจะมีป้ายกำกับ A1 ถึง A2, S1 ถึง S2 และ F1 ถึง F2 และมอเตอร์ผสมแรงดันไฟฟ้าคู่จะมีป้ายกำกับ A1 ถึง A2, S1 ถึง S2, F1 ถึง F2 และ F3 ถึง F4 ประเด็นเพิ่มเติมที่สำคัญสำหรับมอเตอร์ที่มีแผลแบบผสมคือโดยปกติแล้วขดลวดแบบอนุกรมจะพันไว้ด้านบนของขดลวดแบบปัด ทำให้เกิดข้อผิดพลาดระหว่างขดลวดทั้งสองนี้ได้
สำหรับมอเตอร์แบบคอมพาวด์ การทดสอบมักจะนำมาจากขั้วต่อไดรฟ์ DC การทดสอบ MCA มาตรฐานโดยใช้ ALL-TEST เกี่ยวข้องกับแรงดันไฟฟ้าต่ำ สัญญาณความถี่สูงที่จะไม่เป็นอันตรายต่อเอาต์พุตอิเล็กทรอนิกส์ของอุปกรณ์ ช่วยลดความจำเป็นในการถอดสายไฟออกจากไดรฟ์ขณะทำการทดสอบ อย่างไรก็ตาม หากนักวิเคราะห์ต้องการตรวจสอบความต้านทานของฉนวนระหว่างขดลวดอนุกรมและขดลวด จะต้องถอดสายไฟออกจากไดรฟ์ เมื่อมีแนวโน้มจากไดรฟ์ DC ให้ทดสอบ A1 ถึง S2 และสายไฟฟ้าทั้งสองสนาม จากนั้นทำการทดสอบความต้านทานฉนวน 500 โวลต์ระหว่างสาย S2 และ F1 และเปรียบเทียบกับการทดสอบก่อนหน้าหรือมอเตอร์ที่คล้ายกัน ไม่ว่าในกรณีใด ค่าความต้านทานฉนวนที่อ่านได้ควรอยู่เหนือ 100 เม็ก-โอห์ม.
หน่วย ALL-TEST ช่วยให้เครื่องวิเคราะห์สามารถเปรียบเทียบการอ่านค่าในอดีตกับปัจจุบันได้ทันที เป็นการตรวจสอบอย่างรวดเร็ว ช่วยให้เครื่องวิเคราะห์สามารถตัดสินใจได้อย่างรวดเร็วเพื่อทดสอบขดลวดต่อไป ตามที่กล่าวไว้ในเทคนิคการทดสอบมอเตอร์แบบอนุกรมและแบบแบ่ง การอ่าน I/F และมุมเฟสไม่ควรเปลี่ยนมากกว่า 1 จุดระหว่างการทดสอบ เมื่อเวลาผ่านไป ขดลวดแบบอนุกรมและสนามจะแตกต่างกันอย่างมากจากกันและกัน
การแก้ไขปัญหามอเตอร์แบบผสมควรทำที่ตัวมอเตอร์เอง ถอดสายมอเตอร์ทั้งหมดและแยกออกจากกัน ทดสอบขดลวดแบบอนุกรมและขดลวดสนามตามที่ระบุไว้ในคำแนะนำแบบอนุกรมและขดลวดแบบปัด จากนั้นทำการทดสอบความต้านทานของฉนวนระหว่างขดลวดแบบอนุกรมและขดลวดแบบปัด ความต้านทานของฉนวนควรมากกว่า 100 เม็กโอห์ม
หมายเหตุการทดสอบมอเตอร์ DC MCA
ประเด็นสำคัญหลายประการสามารถทำได้โดยใช้การทดสอบ MCA กับมอเตอร์กระแสตรงประเภทใดก็ได้:
- การอ่านค่า I/F ใดๆ นอกช่วง –15 ถึง –50 เช่น -56 บ่งชี้ถึงความผิดปกติที่ขดลวด
- หากการทดสอบแสดงความต้านทานไม่สิ้นสุดระหว่างสายของวงจรเดียวกัน แสดงว่าขดลวดเปิด
- การเพิ่มขึ้นของความต้านทานอย่างง่ายระหว่างการทดสอบ เมื่อแก้ไขอุณหภูมิแล้ว บ่งชี้ถึงการเชื่อมต่อที่หลวม โดยเฉพาะอย่างยิ่งเมื่อการอ่านอิมพีแดนซ์และค่าความเหนี่ยวนำเปลี่ยนแปลง ความต้านทานอย่างง่ายที่ลดลง เมื่อแก้ไขอุณหภูมิ อาจบ่งบอกถึงการสั้น ซึ่งมักจะมาพร้อมกับการเปลี่ยนแปลงของอิมพีแดนซ์ ความเหนี่ยวนำ มุมเฟส และ I/F
- เมื่อทำการทดสอบเช่นมอเตอร์ I/F และมุมเฟสไม่ควรเปลี่ยนเกิน 2 จุด ความแตกต่างที่มากกว่านี้ควรทำการวิเคราะห์อย่างเต็มรูปแบบ
- การเปลี่ยนแปลงเมื่อทดสอบผ่านวงจรกระดองควรกระตุ้นให้มีการทดสอบแบบบาร์ต่อบาร์
การปฏิบัติตามคำแนะนำง่ายๆ เหล่านี้โดยใช้อุปกรณ์ MCA จะช่วยให้คุณตรวจจับข้อผิดพลาดล่วงหน้าได้นานก่อนที่อุปกรณ์จะล้มเหลวระหว่างการทำงาน หากดำเนินการทดสอบโดยเป็นส่วนหนึ่งของโปรแกรมการบำรุงรักษาเชิงคาดการณ์ ช่วงเวลาควรเป็นอย่างน้อยตามที่แสดงในตารางที่ 1
ตารางที่ 1: ความถี่ทดสอบมอเตอร์กระแสตรง
| ประเภทการทดสอบ | ไม่สำคัญ | ทั่วไป | วิกฤต |
| บำรุงรักษาทั่วไป | 1 ปี | 6-9 เดือน | 3-6 เดือน |
| การบำรุงรักษาเชิงคาดการณ์ | 6 เดือน | 3 เดือน | 1 เดือน |
| การทดสอบกระดอง | 1 ปี | 6 เดือน | 3 เดือน |
การทดสอบการบำรุงรักษาทั่วไปคือการทดสอบที่ไม่มีแนวโน้มเมื่อเวลาผ่านไป มักจะมาพร้อมกับการสั่นสะเทือน การหล่อลื่นแบริ่ง การตรวจสอบสับเปลี่ยน และการตรวจสอบแปรง โดยปกติการทดสอบการบำรุงรักษาเชิงคาดการณ์เกี่ยวข้องกับการอ่านแนวโน้มในช่วงเวลาต่างๆ เพื่อตรวจหาข้อบกพร่องที่อาจเกิดขึ้น จากนั้นกำหนดเวลาที่ดีที่สุดในการถอดมอเตอร์เพื่อการบำรุงรักษาแก้ไข เมื่อตรวจพบข้อผิดพลาดที่อาจเกิดขึ้น ความถี่ในการทดสอบควรเพิ่มขึ้นจนกว่าจะกำหนดได้ว่าจำเป็นต้องถอดมอเตอร์ออก ควรทำการทดสอบเกราะอย่างสมบูรณ์ร่วมกับการทดสอบทั่วไปหรือการทดสอบการบำรุงรักษาเชิงคาดการณ์ เนื่องจากความเค้นสูงที่ตัวสับเปลี่ยนและการปนเปื้อนของคาร์บอน
บทสรุป
การทดสอบทางไฟฟ้าทั่วไปของมอเตอร์ไฟฟ้ากระแสตรงทำได้ง่ายขึ้นด้วยเทคนิคใหม่ๆ ที่มีในการวิเคราะห์วงจรมอเตอร์แบบคงที่ นับเป็นครั้งแรกที่สามารถตรวจพบข้อผิดพลาดในการเลี้ยวก่อนกำหนดในขดลวดแบบอนุกรม ขดลวดแบบแยก และแบบกระดอง ก่อนที่จะนำอุปกรณ์ออกจากการทำงาน สามารถทำการทดสอบการบำรุงรักษาเชิงคาดการณ์ได้จากไดรฟ์โดยมีการทดสอบการแก้ไขปัญหาที่มอเตอร์ โดยทั่วไป การทดสอบค่อนข้างรวดเร็ว โดยใช้เวลาน้อยกว่าห้านาทีต่อมอเตอร์สำหรับการทดสอบการบำรุงรักษาเชิงคาดการณ์ โดยต้องใช้เวลาเพิ่มเติมสำหรับการแก้ไขปัญหา โดยรวมแล้ว การทดสอบ MCA ช่วยปรับปรุงการทดสอบมอเตอร์กระแสตรงได้อย่างมากเมื่อเทียบกับวิธีการทดสอบความต่อเนื่องแบบดั้งเดิม
เกี่ยวกับผู้เขียน
ดร.โฮเวิร์ด ดับบลิว เพนโรส มีประสบการณ์มากกว่า 15 ปีในอุตสาหกรรมซ่อมมอเตอร์ไฟฟ้าและมอเตอร์ไฟฟ้า เริ่มต้นจากการเป็นช่างซ่อมมอเตอร์ไฟฟ้าในกองทัพเรือสหรัฐฯ เพื่อให้บริการภาคสนามและการประเมินอุปกรณ์หมุนขนาดเล็กถึงขนาดใหญ่ทุกประเภท เป็นหัวหน้าวิศวกรของร้านซ่อมมอเตอร์ขนาดใหญ่ในแถบมิดเวสต์เทิร์น ดร. เพนโรสมีส่วนร่วมโดยตรงในการกรอ การฝึกอบรม และการแก้ไขปัญหา AC, DC, โรเตอร์แบบพัน, ซิงโครนัส, เครื่องมือกล และอุปกรณ์พิเศษ การศึกษาเพิ่มเติมของเขาเกี่ยวข้องกับมอเตอร์ไฟฟ้าและความน่าเชื่อถือทางอุตสาหกรรม วิธีการทดสอบ ประสิทธิภาพพลังงาน และผลกระทบต่อการบำรุงรักษาต่อการผลิต ดร. เพนโรสเคยเป็นประธานแผนกชิคาโกของ IEEE, อดีตประธานสมาคมไดอิเล็กทริกและฉนวนไฟฟ้าของ IEEE ชิคาโก, เป็นสมาชิกมืออาชีพของสมาคมการผลิตไฟฟ้าและขดลวด, กระทรวงพลังงานสหรัฐที่ได้รับการรับรอง MotorMaster Professional, a Vibration นักวิเคราะห์อินฟราเรดและนักวิเคราะห์วงจรมอเตอร์

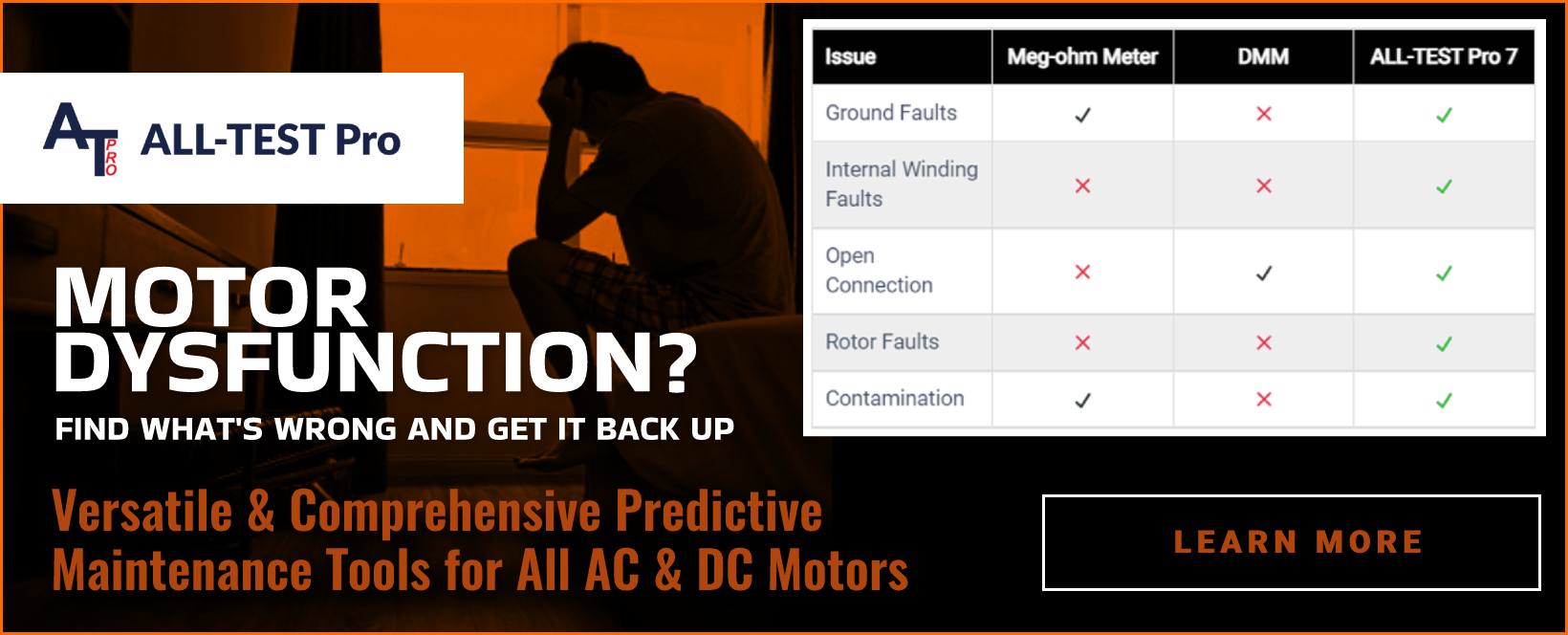
AT34™
วิเคราะห์และแนวโน้มความสมบูรณ์ของส่วนประกอบมอเตอร์สำหรับความผิดปกติของกราวด์ ความผิดปกติของขดลวดภายใน การเชื่อมต่อแบบเปิด และการปนเปื้อน – ทั้งหมดนี้ทำได้ด้วยอุปกรณ์มือถือเครื่องเดียว

