การทดสอบมอเตอร์ออนไลน์พร้อมการวิเคราะห์ลายเซ็นทางไฟฟ้า
การทดสอบมอเตอร์ไฟฟ้าแบบออนไลน์ 101
การวิเคราะห์ลายเซ็นทางไฟฟ้า (ESA) เป็นวิธีการทดสอบออนไลน์โดยจับรูปคลื่นของแรงดันไฟฟ้าและกระแสในขณะที่ระบบมอเตอร์กำลังทำงาน จากนั้นการวิเคราะห์สเปกตรัมจะดำเนินการโดยใช้ซอฟต์แวร์ที่ให้มาผ่านการแปลงฟูเรียร์แบบเร็ว (FFT) จาก FFT นี้ ฟอลต์ที่เกี่ยวข้องกับกำลังขาเข้า วงจรควบคุม ตัวมอเตอร์เอง และโหลดที่ขับเคลื่อนจะถูกตรวจพบ จากนั้นจึงสามารถคาดการณ์ได้เพื่อวัตถุประสงค์ในการบำรุงรักษาตามเงื่อนไข/การบำรุงรักษาเชิงคาดการณ์ เครื่องมือ ESA เฉพาะของเราเป็นแบบมือถือ แบบพกพา และใช้แบตเตอรี่
ระบบการวิเคราะห์ ESA ทั้งหมดต้องการข้อมูลป้ายชื่อมอเตอร์เกี่ยวกับแรงดันไฟฟ้า ความเร็วในการทำงาน กระแสโหลดเต็ม และแรงม้า (หรือ kW) นอกจากนี้ สามารถป้อนข้อมูลเสริม เช่น แท่งโรเตอร์และจำนวนช่องสเตเตอร์ หมายเลขแบริ่ง และข้อมูลสำหรับส่วนประกอบโหลดที่ขับเคลื่อน เช่น จำนวนใบมีดสำหรับพัดลมหรือจำนวนฟันสำหรับการใช้งานกล่องเกียร์เพื่อการวิเคราะห์ที่ละเอียดและแม่นยำมากขึ้น
การทดสอบออนไลน์แบบใช้พลังงานจะให้ข้อมูลที่เป็นประโยชน์สำหรับมอเตอร์เหนี่ยวนำกระแสสลับและมอเตอร์กระแสตรง เครื่องกำเนิดไฟฟ้า มอเตอร์โรเตอร์แบบพันแผล มอเตอร์ซิงโครนัส มอเตอร์เครื่องมือกล ฯลฯ เนื่องจาก ESA ยังใหม่สำหรับคนจำนวนมาก แผนภูมิด้านล่างจึงแสดงความสามารถในการประเมินของ ESA ของส่วนประกอบหลักภายในระบบมอเตอร์
![]()
ทำการวิเคราะห์คุณภาพไฟฟ้าด้วย
- การบันทึกข้อมูลคุณภาพไฟฟ้า
- แรงดันไฟฟ้า 3 ช่องและการบันทึกกระแสไฟฟ้า 4 ช่อง
- การจับรูปคลื่นของเหตุการณ์ ≥ ½ รอบ
- การตรวจจับเหตุการณ์ชั่วคราว ≥ 8 ไมโครวินาที
- การบันทึกข้อมูลพลังงาน · การวิเคราะห์ฮาร์มอนิกถึงอันดับที่ 63 (V & I)
- กราฟเฟสเซอร์ · เทมเพลตรายงานที่ตั้งไว้ล่วงหน้าและใช้งานง่าย
- รายงานการประหยัดพลังงานโดยใช้ฟังก์ชันการวิเคราะห์ก่อนและหลัง
การทดสอบออนไลน์พร้อมการวิเคราะห์ลายเซ็นทางไฟฟ้า
การทดสอบทั้งหมด PRO OL II (ATPOL IITM)
- อีเอสเอ
- คุณภาพไฟฟ้า
- Sags & บวม
- การจับรูปคลื่น
- การบันทึกข้อมูลพลังงาน

การสมัคร ESA ที่ประสบความสำเร็จ
- มอเตอร์ AC/DC
- การใช้งานมอเตอร์ไดรฟ์
- เครื่องกำเนิดไฟฟ้า/เครื่องกำเนิดไฟฟ้ากระแสสลับ
- มอเตอร์ฉุด
- มอเตอร์เครื่องมือกล
- กล่องเกียร์
- ปั๊มและพัดลม
- เพื่อความน่าเชื่อถือ
- สำหรับการว่าจ้าง
- สำหรับการแก้ไขปัญหา

กล่องเชื่อมต่อ ALL-SAFE PROTM ช่วยให้ช่างเทคนิครวบรวมข้อมูลการทดสอบออนไลน์โดยไม่ต้องเปิดแผงที่จ่ายไฟ
การตรวจจับข้อผิดพลาดอัตโนมัติ
ตัวอย่างโดยสรุปด้านล่างนี้สำหรับมอเตอร์เหนี่ยวนำกระแสสลับที่มีโรเตอร์แบบกรงกระรอก
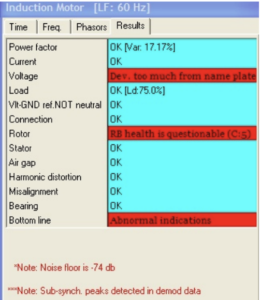
ข้อมูลจะถูกรวบรวมผ่านโพรบวัดแรงดันไฟฟ้าและกระแสแบบพกพาหรือกล่องเชื่อมต่อที่ติดตั้งถาวร (ALL-SAFE PRO TM)
ข้อมูลที่รวบรวมไว้จะถูกวิเคราะห์โดยซอฟต์แวร์ที่ให้มา
สัญญาณเตือนจะถูกตั้งค่าไว้ล่วงหน้าและมีเทมเพลตรายงานอัตโนมัติสำหรับมอเตอร์เหนี่ยวนำ AC, ซิงโครนัส และ DC รวมถึงหม้อแปลงไฟฟ้า

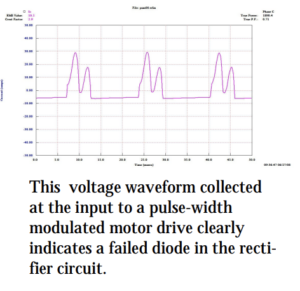
การกระเพื่อมที่มากเกินไปบนรูปคลื่นแรงดันไฟฟ้านี้บ่งชี้ว่าตัวเก็บประจุล้มเหลวในมอเตอร์ไดรฟ์แบบปรับความกว้างพัลส์นี้ สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการทดสอบไดรฟ์มอเตอร์ PWM โดยใช้อีเมล ESA [email protected]
การวิเคราะห์กำลังที่เข้ามา
- เพาเวอร์แฟกเตอร์
- ความไม่สมดุลของกระแสและแรงดัน
- แรงดัน RMS ไปยังแผ่นป้าย
- แรงดันและกระแสสูงสุดและปัจจัยยอด
- ความต้านทานเฟส
- กำลัง (ปรากฏ จริง และโต้ตอบ)
- ความเพี้ยนฮาร์มอนิกรวม (แรงดันและกระแส)
การวิเคราะห์กำลังของมอเตอร์
- โหลดไปที่แผ่นป้าย
- THDF (ปัจจัยการลดพิกัดฮาร์มอนิกของหม้อแปลงไฟฟ้า)
- VDF (ปัจจัยการลดพิกัดแรงดันไฟฟ้า)
- ผลิตภัณฑ์ของ THDF และ VDF สามารถใช้ในการลดพิกัดแรงม้าได้
- ความต้องการพลังงาน
- ฮาร์โมนิกลำดับลบ บวก และศูนย์รวม
- ประสิทธิภาพสำหรับมอเตอร์เหนี่ยวนำกระแสสลับและมอเตอร์กระแสตรง
- * สามารถใช้กับโปรแกรมซอฟต์แวร์ Motor Master+ ของกระทรวงพลังงานสหรัฐฯ เพื่อการตัดสินใจซ่อมแซมหรือเปลี่ยนชิ้นส่วน MM+ จะคำนวณการคืนทุนหากอัปเกรดเป็นมอเตอร์ประหยัดพลังงาน
การวิเคราะห์มอเตอร์
- ความถี่ของเส้น
- ความเร็วในการทำงาน
- ความถี่ในการผ่านเสา
- สุขภาพของโรเตอร์
- Air Gap (ความเยื้องศูนย์แบบคงที่และไดนามิก)
- การวางแนวไม่ตรง/ไม่สมดุล
- สเตเตอร์ไฟฟ้า
- เครื่องกลสเตเตอร์
- ความสมบูรณ์ของการเชื่อมต่อเฟส
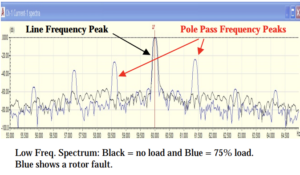
ซอฟต์แวร์การวิเคราะห์มีฟังก์ชันเปรียบเทียบ โดยที่สเปกตรัมหนึ่งสามารถวางซ้อนบนอีกสเปกตรัมหนึ่งเพื่อวัตถุประสงค์ในการเปรียบเทียบ รูปด้านล่างแสดงสเปกตรัม FFT ของมอเตอร์ที่ไม่มีโหลด จากนั้นที่โหลด 75% ยอดเขาเล็กๆ สีฟ้าที่ด้านใดด้านหนึ่งของยอดเขาสีน้ำเงินขนาดใหญ่อยู่ที่สิ่งที่เรียกว่าความถี่ผ่านขั้วโลก จุดสูงสุดเหล่านี้มีสาเหตุมาจากแท่งโรเตอร์หักหลายเส้น
การวิเคราะห์โหลด
ระบบเครื่องกลสามารถวิเคราะห์ได้หลังจากป้อนข้อมูลลงในซอฟต์แวร์แล้ว
- เชื่อมต่อโดยตรง
- กล่องเกียร์
- คาดเข็มขัด
- ใบพัด
- ใบพัด
รายละเอียดเพิ่มเติมเกี่ยวกับการวิเคราะห์ออนไลน์
การดำเนินการหลักประการหนึ่งของซอฟต์แวร์ ATPOL II คือการดำเนินการกระบวนการดีโมดูเลชันรูท-ค่าเฉลี่ย-กำลังสองบนสัญญาณพาหะของสายไฟ เพื่อให้มีวิธีการแยกสัญญาณที่มีความไวสูงและเลือกสรรในการแยกสัญญาณกระแสออกจากโหลดของมอเตอร์ ดีโมดูเลชั่นของสัญญาณกระแสดิบนี้จะกำจัดส่วนประกอบความถี่ของเส้นขนาดใหญ่ออก เพื่อให้อัตราส่วนสัญญาณต่อเสียงรบกวนดีขึ้นมากสำหรับส่วนประกอบต่างๆ ที่ทำให้เกิดการมอดูเลต เช่น ความเร็วในการวิ่ง การส่งผ่านของสายพาน เฟืองเมช ฯลฯ
ข้อบ่งชี้ประสิทธิภาพหลายประการจะถูกเปิดเผยภายในโดเมนเวลาและความถี่ที่ให้ข้อมูลที่จำเป็นเพื่อพิจารณา ‘สภาพ’ ของมอเตอร์และผลกระทบของโหลดที่ส่งมอบ ซึ่งจะทำให้สามารถ ‘มองเห็น’ ความเร็วในการวิ่งที่แท้จริง ความถี่การสลิปของมอเตอร์ ความถี่ของเฟืองเกียร์ ส่วนประกอบของชุดขับเคลื่อน และความเร็วในการหมุนของเฟือง
เพื่อแยกความถี่ต่างๆ จะใช้ Fast Fourier Transform (FFT) และสเปกตรัมความถี่ที่ได้จะแสดงบนหน้าจอ จุดสูงสุดในสเปกตรัมนี้สอดคล้องกับความเร็วในการหมุนของส่วนประกอบต่างๆ ในเครื่องจักร ตัวอย่างเช่น ในกรณีของพัดลมที่ขับเคลื่อนด้วยมอเตอร์ไฟฟ้าผ่านสายพาน ยอดจะสัมพันธ์กับความเร็วของมอเตอร์ ความถี่ในการผ่านขั้ว ความเร็วพัดลม และความเร็วของสายพาน หากใช้กล่องเกียร์แทนการขับเคลื่อนด้วยสายพาน ยอดสเปกตรัมจะปรากฏขึ้นที่ความเร็วการหมุนของเฟืองและความถี่การประกบเฟือง
The height of these spectral peaks depends on two things: the overall current level delivered to the motor and the amplitude of the mechanical disturbance originating from the machine and perceived by the motor. This mechanical disturbance begins with torque variations and ends at the motor with small speed changes, allowing for the measurement of small current fluctuations under constant overall speed conditions. For example, a change in the peak height of a fan indicates deterioration in the fan’s mechanical condition. By observing these changes, various faults such as imbalance, misalignment, worn drive pulleys, or faulty bearings can be easily identified. Therefore, after periodic data collection, frequency readings are used to monitor electric motor-driven machinery, providing early warning of potential deterioration.
A key difference between Motor Current Signature Analysis (MCSA) and Electrical Signature Analysis (ESA) is that with MCSA, the FFT only processes the current waveform, not the voltage, making it more difficult to distinguish input power-related problems from motor and driven load issues. With ESA, you have both current and voltage FFTs to view on the same screen, so it’s simply a matter of comparing the voltage and current FFT spectra to identify the source of the fault.
Generally, if the peak is dominant in the voltage spectrum, the source of this peak is the motor. If the peak is dominant in the current spectrum, the source is related to the motor or the load.
ESA abnormality patterns
Types of offenses:
Stator mechanism: CF = RS x Stator slots with LF Sidebands
Fixed eccentricity CF = RS x rotor bar with side bars LF and 2LF
Uses a proprietary algorithm for mechanical imbalance/misalignment.
Dynamic eccentricity CF = RS x Rotor bar LF and 2LF sidebar with sidebar RS.
Electrical stator (shorts) CF = RS x LF stator slot, side strip with RS side strip.
CF = Center Frequency, RS = Operating Speed, LF = Line Frequency

AT34™
วิเคราะห์และแนวโน้มความสมบูรณ์ของส่วนประกอบมอเตอร์สำหรับความผิดปกติของกราวด์ ความผิดปกติของขดลวดภายใน การเชื่อมต่อแบบเปิด และการปนเปื้อน – ทั้งหมดนี้ทำได้ด้วยอุปกรณ์มือถือเครื่องเดียว

