Industry Leading
Electric Motor Testing Equipment
Electric motor testing is integral to the success and efficiency of your business. ALL-TEST Pro’s electric motor testing equipment provides comprehensive motor health analyses that go beyond standard testing methods to ensure that your motors stay dependable.

Electric Motor Predictive Maintenance Done Right.
Unplanned downtime can cost manufacturers up to $22,000 per minute! Don’t let your business’ production stall and lose valuable time and money.
Our advanced motor analysis devices alleviate the stress from unpredictable motor failures so your business will remain up and running. Our electric motor predictive maintenance (PdM) product line fills in the gaps that other predictive maintenance products, such as vibration monitors and infrared sensors, do not test. Our products apply to all industries that use transformers, electric motors, and generators.
With our long-standing reputation for excellent products and top-notch customer service, our company takes pride in being relied upon by major businesses worldwide.
There are no other instruments on the market that test as many factors as accurately and quickly as our products.
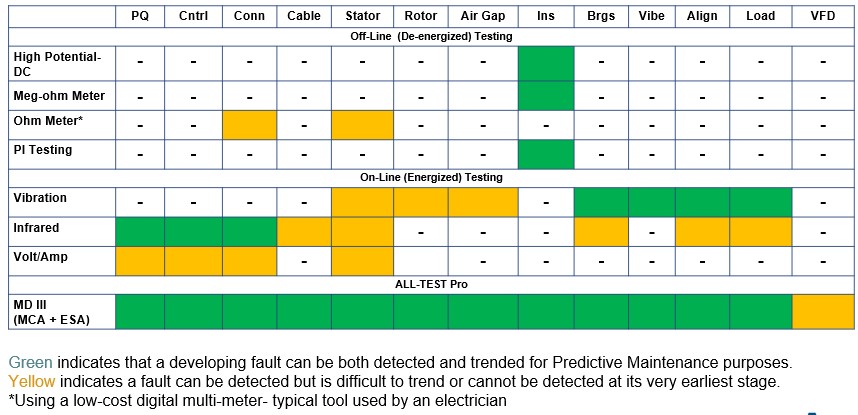



Traditional Meghommeter & Multi-Meter Testing Isn’t Enough
Megohmmeter insulation testing only detects faults to ground. Since only a portion of motor electrical winding failures begin as ground faults, they will go undetected using this method alone. Moreover, surge testing requires the application of high voltages which can be destructive when testing a motor, making it an unsuitable method for troubleshooting and true predictive maintenance testing.
ALL-TEST Pro devices provide more comprehensive diagnostics of your motors health than any other device on the market.
Issue | Meg-ohm Meter | Multi-Meter | ALL-TEST PRO 7 |
Ground Faults |
|
|
|
Internal Winding Faults |
|
|
|
Open Connection |
|
|
|
Rotor Faults |
|
|
|
Contamination |
|
|
|


Extensive, Dependable Solutions

Deenergized (MCA™) Testing
Motor Circuit Analysis (MCA™) allows for deenergized motor testing of the entire electrical portion of the motor system. Our products in this category include our extremely popular ALL-TEST PRO 7™, ALL-TEST PRO 7™ PROFESSIONAL, ALL-TEST PRO 34™, ALL-TEST PRO 34 EV™ and MOTOR GENIE®.

Energized (ESA) Testing
Electrical Signature Analysis (ESA) is an energized test method where voltage and current waveforms are captured while the motor system is running, to assess the health of the motor system. In this category, you can choose our ALL-TEST PRO On-Line III™ and our ALL-SAFE PRO®, an accessory to the ATPOL III™.

Assemblies
Our Assemblies combine ESA, MCA, and software to improve your plant productivity with a rapid ROI. For a full motor analysis, we offer the ALL-TEST PRO MD III™ assembly.
What Reliability Professionals are saying
Upcoming Training

Motor Diagnostic Seminar at the University of Tennessee Reliability Center – Level 1 & Level 2 – July 22
The University of Tennessee Reliability Center and ALL-TEST Pro have teamed up to publicly present Motor Diagnostic Seminar Level I and Level II training courses this summer! This is a […]
Online World Class Motor Diagnostic Seminar – Level 1 – April 15-19
Have you heard? We will be holding our World Class Motor Diagnostic Seminar Level 1 on April 15-19. This will be an online/virtual seminar starting each day at 8AM EST. […]
Testing Electric Motors Made Easy
With unmatched portability, ease of use, and safety features, ALL-TEST Pro’s line of electrical motor testing equipment enable technicians to evaluate equipment in the field, on the shop floor, or at a service facility.
Why test motors? Because motors fail.
Not all winding faults start as ground faults. Identifying motor faults before the motor fails can save you countless hours in downtime and maintenance fees.
Predictive Maintenance (PdM) & Electric Motor Reliability
All-TEST Pro is an industry leader in developing preventive electric motor testing equipment and predictive maintenance (PdM) tools. Our electric motor testing devices use patented technologies to analyze and diagnose issues to ensure motor reliability and reduce unnecessary business costs.