Predictive Maintenance Program: Implementing ESA – Part II
This is a follow-up to the article that was published in the Dec/Jan 2012 issue of Uptime.
Abstract
This is the second part of a series of articles discussing using electrical signature analysis (ESA) to improve a plant’s electrical reliability. This article was written to give those not familiar with spectrum analysis the basics to read and interpret the graphs and displays used in spectrum analysis. It also introduces some basic analysis techniques to begin using ESA to identify developing problems in the motor system that could lead to either a loss of production or an increase in maintenance costs.
Electrical Signature Analysis
ESA is a predictive maintenance (PdM) technology that uses the motor’s supply voltage and operating current to identify existing and developing faults in the entire motor system. These measurements act as transducers and any disruptions in the motor system cause the motor supply current to vary (or modulate). By analyzing these modulations, it is possible to identify the source of these motor system disruptions.
Machinery Analysis Historically, vibration analysis has been the basis for rotating machinery analysis to assess the condition of rotating equipment and has been used very effectively for over 70 years. Modern electronics and microprocessors have matured this process, from simple vibration amplitude measurements using a coil, magnet and a meter to measure overall vibration amplitudes to quickly assessing the mechanical condition of rotating machinery. It soon became apparent that machines with high levels of vibration generally were in poor mechanical condition and led to the development of various vibration severity charts, all of which are based solely on users’ experience.
Spectrum Analysis
Spectrum analysis in signal processing is the process that defines the frequency content of a time domain signal. Once the frequency content of the measured signals are known, they are correlated to the operational and design characteristics of the machine or machines to help identify the force that creates the oscillating motion.
Machinery vibration spectrum analysis begins with the sensor (transducer) placed on or near the oscillating component; this is usually at the bearing or the bearing housing to convert the component’s mechanical motion to an electrical signal. The output electrical signal follows the component’s motion exactly, which varies with time and is referred to as time domain signals. The strength or amplitude of the signal varies depending on the amount of movement.
Early spectrum analysis used tunable filter analyzers to sweep an analog bandpass filter across a predetermined frequency range. These analyzers worked similar to tuning a radio. As the bandpass filter scans through the frequency range, any signals present in that range would create an output. The output of the bandpass filter would be traced on a frequency graph to identify the frequencies that were present in the output of the transducer.
The modern multi-channel, high resolution, digital analyzers create the frequency spectra using fast Fourier transform (FFT). Additionally, they allow various signal processing techniques, such as sideband analysis, synchronous time averaging, negative averaging, envelope processing and many other advanced techniques that accurately interpret the spectra.
Regardless of the advances in signal processing, vibration analysis is still limited by the laws of physics and the limits of the transducers. Since the vibration is a measure of a machine’s mechanical oscillations, either random or periodic, sufficient force is necessary from the machinery condition or component fault to overcome the mass and stiffness of the machine and structure, as well as any damping supplied by the bearing or support system.
Additional limitations are created by the measurement transducer itself. These are the types of measurement, relative or absolute, frequency response of the transducer and the inherent frequency limitations of the measurements themselves, displacement, velocity, or acceleration.
Frequency Analysis
Time Waveforms
A time waveform is simply a display of a variable function in relation to time. If the variations occur at the same time intervals, the waveform is periodic. A periodic waveform is one which repeats the exact same shape or pattern for the waveform’s whole duration. The simplest form of a waveform is a sine wave and consists of a single frequency. Waveforms that are made up of multiple frequencies are called complex waveforms. The graphical display of waveforms is called the time domain. The display simply shows the instantaneous value of the variable in relation to time. In the time domain, the horizontal axis indicates time, whereas the vertical axis indicates the magnitude of the variable.
Fourier Transform
Jean Baptiste Joseph Fourier, an 18th century French mathematician and physicist, was one of the first to recognize that complex waveforms are a combination of multiple sine waveforms and initiated research into this field. The mathematical solution used to determine the series of frequencies that make up any complex waveform is named in honor of him and is called Fourier transform. The original Fourier transform assumes an unbounded or infinite sample. Since then, it has been determined that Fourier transform can be applied to a finite waveform and has been called discrete Fourier transform (DFT). Algorithms have been developed for the efficient and high speed calculation of DFTs; these algorithms are referred to as fast Fourier transform (FFT).
In simple terms, FFT takes a finite sample of a time waveform, then calculates the amplitude and frequencies of the sine waves that are combined together to create the complex waveform.
The graphical displays of FFTs are presented in the frequency domain and are referred to as a frequency spectrum. The frequency spectrum displays the frequencies present in the complex waveform on the horizontal axis and the amplitude of the signal on the vertical axis. If sufficient motion is present at any frequency, a vertical line will be displayed on the horizontal axis to indicate the presence of that frequency. This height of the vertical line or spectral line indicates the strength or amplitude of the waveform at that frequency. If one of the sine waves present in the complex waveform is at 30 Hz with amplitude of 3 amps, a spectral peak would be placed at 30 Hz and the height would represent three units.
There are many programs available to perform FFT and the analyst is not required to perform these, but the analyst does require a basic understanding of this graphical display itself. The minimum understandings of the FFT display are the frequency range, resolution and bandwidth. More advanced analysis can be performed with an understanding of sidebands, harmonics, logarithmic scaling and demodulation. The following information attempts to provide a sufficient understanding of these basic FFT principles to allow the reader to accurately analyze the data gathered using ESA.
Understanding the FFT
Understanding the limits of any display is invaluable in the accurate analysis of that display. FFT is a mathematical computation and these limits are established before the mathematical computation is performed. These boundaries are frequency range and lines of resolution.
Frequency Range
The frequency range determines the frequencies that will be included in the FFT calculation. If the selected frequency range is too low, faults at higher frequencies will be missed. If the selected frequency range is too high, frequencies’ series that are close together might be combined. Additionally, the frequency range determines the data acquisition time. The frequency of a periodic signal is the inverse of time; the lower the selected frequency range, the longer it takes to perform the data collection. In PdM, most FFTs start at DC (0 Hz) and continue to some maximum value. The maximum frequency range is referred to as Fmax. For more in-depth analysis, it is possible to set the lower limit of the frequency range at a value greater than 0 Hz and some higher limit. This is referred to as a zoomed spectrum.
Resolution
The second pre-determined boundary is the lines of resolution. Each frequency spectrum is divided into a finite number of spectral lines. Spectral line is actually a misnomer since in reality it is not a line, but a spectral bin. Each spectral bin will have a high and low frequency limit. These limits are determined by the frequency range of FFT and the number of lines. The width of the spectral bin is called the bandwidth (BW). To determine the width of each spectral bin, simply divide the number of spectral lines into the frequency range (FR). If the frequency range is 100 Hz and there are 100 spectral lines, the width of each line is 1 Hz.
BW = # lines/FR
The bandwidth of each spectral bin also can be calculated by subtracting the low frequency limit (fl ) from the upper frequency limit (fu ) of each spectral bin.
BW = fu -fl
Each spectral bin is aligned next to the previous bin and the lower frequency limit of each bin is the upper frequency limit of the previous bin. The upper frequency limit will be the lower limit of the bin plus the bandwidth.
For example: In the first spectral bin in a 100 line spectrum with FR from DC to 100 Hz, the lower frequency limit is 0 and the upper frequency limit is 1 Hz. The BW of the spectral bin is 1 Hz. Then the second bin would The frequency range determines the frequencies that will be included in the fast Fourier transform (FFT) calculation. If the selected frequency range is too low, faults at higher frequencies will be missed. 20 june/july12 go from 1 Hz to 2 Hz, thethird bin from 2 Hz to 3 Hz and so on, with the last spectral bin 99 Hz to 100 Hz.
If the bandwidth of a spectral bin is too wide, multiple frequencies may reside in the same spectral bin. Additionally, when evaluating a frequency spectrum, the displayed frequency of the spectral bin is the center frequency (cf) of that spectral bin. To determine the cf of the spectral bin, simply calculate the average of the upper frequency limit and the lower frequency limit.
cf = (fu + fl)/2
What this means is that the indicated frequency may not be the frequency of the actual signal. The frequency value displayed is the center frequency of the spectral bin, whereas the actual frequencies of the waveform(s) could be any frequency within the bandwidth of the spectral bin. Each spectral bin may include more than one frequency. The wider the bandwidth, the less accurate the frequency of the displayed value of the spectral bin, and this increases the probability of analysis error.
To reduce this analysis error, simply increase the resolution of a FFT spectrum. Reducing the frequency range of FFT increases the resolution, but also increases both the time intervals between data sampling time and the data acquisition time. Another method is to increase the number of spectral bins into which FFT is divided. Increasing the number of spectral bins requires taking more samples of the measured signal. To double the number of lines of resolution, twice as much data must be acquired.
Determining Resolution
The number of lines of resolution (# lines) of a FFT spectrum can be determined by simply multiplying the period (P) of the time waveform by the frequency range (FR) in cycles per second (cps).
(# lines=P x FR)
Since ESA digitizes the time waveform, FFT is performed in the computer, where it is possible to change the FFT resolution after data collection. This allows the analyst to examine very small portions of the captured waveform. However, it is important to remember that by reducing the period of the time capture, the number of lines of resolution will be reduced proportionally and the probability of analysis error increases.
Amplitude Displays
Linear Scaling
The most commonly used graphical display of FFT is the linear scale. On the linear scale, the spacing between the markers is always the same and equally spaced. This allows all of the data to be conveniently displayed on a single graph. Linear graph displays work well with data sets when meaningful changes are important and very small changes are insignificant. The units displayed on the linear scale are the engineering units of the measured variable. In ESA, these units are either voltage (volts) or current (amps).
Logarithmic Scaling
The logarithmic scale displays the amplitude in order of magnitude or a logarithm of the variable instead of the variable itself. One advantage of the log scale is the ability to display a very large range of amplitudes on a single graph. When very small changes in the measured variable are significant, displaying the variable in the linear format may not adequately identify the change. In these instances a logarithmic (log) display is used.
In ESA, the log scale is commonly used since the measured variables are line voltage or current. Very small changes in either of these measurements are used to identify faults in the motor system. The carrier frequency of these variables is at the frequency of the applied voltage, usually 50 Hz or 60 Hz.
Since the logarithmic display is essentially a ratio, it is also a very convenient method for comparing unlike variables. This has proven extremely useful in ESA since one of its important aspects is the ability to differentiThe Revolution Begins! Only $2,450! The ALiSENSOR™ Level is here! The ALiSENSOR™ Level is the world’s first iOS Geometric Measurement System. Now, measurements like Straightness, Inclination, and Squareness are even easier and more affordable than ever! You can even use your own iPad, iPhone, or iPod Touch as the Display Unit, using FREE downloadable Apps from the App Store, including automatic updates! 2 Year Warranty! Call or visit Alignment Supplies, Inc. today to learn more about this revolutionary new system! 419.887.5890 / 800.997.4467 www.alignmentsupplies.com ate between faults in the incoming power and faults added by either the motor or the driven machine.
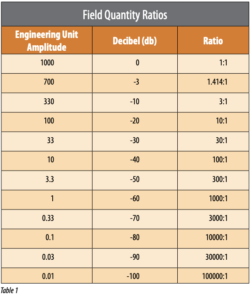
The units used in the log scale are decibels (db), which are a logarithm with a base ten. The db is a unit used to describe a ratio. The measurements of voltage and current are field quantities and the db ratios used in ESA are also field quantities. Table 1 provides a guide to the relationship of the measured variable and the peak value of the current and voltage waveforms compared to the highest peak in the spectrum.


Summary
Effective use of ESA as a PdM technology requires the ability to manipulate, interpret and understand the graphs, charts and displays developed by the ESA software. These graphs, charts and displays are then used to identify faults in the motor system. Engineers and PdM technicians familiar with vibration analysis will find that ESA FFT is similar to the vibration spectrum and many of the analysis techniques are the same. However, even in MVA, it is important that the analyst has a thorough understanding of not only what FFT is indicting, but more importantly, what it isn’t.
ATPOL III™
Comprehensively analyze power quality and electrical motor component integrity on AC/DC motors, generators, and transformers.

PVT-Hybrid Seminar MCA Level 1 – 08/04/2026-08/06/2026
8:30 am - 5:00 pm PLEASE CONTACT [email protected] AND MENTION REF#125-13896 FOR MORE INFORMATION. First Name * E-mail * Company Phone* Product of Interest* —Please choose an option—AT34EV™AT34™AT7™AT7™ PROFESSIONALATPOL III™MDIII™ALL-SAFE [...]
PVT-Hybrid Seminar ESA Level 1 – 08/11/2026-08/13/2026
8:30am-5:00pm EST PLEASE CONTACT [email protected] AND MENTION REF#125-13889 FOR MORE INFORMATION. First Name * E-mail * Company Phone* Product of Interest* —Please choose an option—AT34EV™AT34™AT7™AT7™ PROFESSIONALATPOL III™MDIII™ALL-SAFE PRO®AccessoriesSoftwareTechnical Support ConsultingOther [...]