Panduan Pengujian Mesin Berputar
1. Ikhtisar
1.1 Ruang Lingkup
Dokumen ini menjelaskan panduan untuk mengevaluasi armatur peralatan berputar dan belitan medan, dengan nilai 1 daya kuda (746 Watt) atau lebih besar, untuk korsleting belitan, ketidakseimbangan fasa, dan batang rotor. Ini berlaku untuk mesin induksi dan transformator.
Dokumen ini menjelaskan pengukuran analisis rangkaian belitan statis yang khas dan bagaimana pengukuran ini menunjukkan kondisi mesin. Ini memberikan panduan mengenai batas-batas untuk pengukuran sirkuit.
Jenis pengukuran yang ditinjau disediakan oleh individu atau kumpulan instrumentasi yang menyediakan pengukuran rangkaian belitan dasar seperti resistansi, impedansi, induktansi, kapasitansi, dan pengukuran uji khusus. Diakui bahwa teknik pengukuran harus mencakup (Referensi: IEEE Std 120-1989):
a) Pengukuran resistansi arus searah harus menggunakan nilai arus searah.
b) Pengukuran arus bolak-balik, seperti induktansi dan impedansi, harus berupa arus bolak-balik dengan menggunakan pengukuran gelombang sinus seperti yang dipilih oleh produsen instrumen.
c) Semua pengukuran harus dievaluasi melalui sirkuit yang dijembatani dan dilaporkan dalam batas-batas jembatan tersebut. Unit pengukuran teknik standar tidak boleh dihitung, seperti induktansi dan impedansi, kecuali jika nilainya disajikan sebagai rasio, derajat, atau persentase.
Pada saat rancangan awal pedoman ini dibuat, tegangan output, untuk memberikan hasil pengujian pada semua pengukuran kecuali pengukuran insulasi arde, berada dalam rentang elektronik dan biasanya ditemukan di bawah 10 Volt AC/DC. Frekuensi output standar untuk instrumen ini juga umumnya berkisar di atas 100 Hz. Jika instrumentasi dikembangkan dengan menggunakan prinsip-prinsip rekayasa suara yang melebihi nilai ini, atau jika nilai tambahan diberikan yang memberikan tampilan akurat dari rangkaian motor, maka nilai tersebut dapat dimasukkan dalam cakupan pedoman ini.
1.2 Tujuan
Tujuan dari pedoman ini adalah untuk menguraikan metode dan data umum yang dikumpulkan dengan menggunakan analisis rangkaian belitan dan untuk memberikan panduan dalam interpretasi hasil untuk insulasi antar belitan, insulasi dinding arde, dan evaluasi rotor sangkar tupai. Metode pengukuran insulasi dinding arde dan hasil pengujian harus mengacu pada revisi Standar IEEE 43 saat ini, ìPraktik yang Direkomendasikan IEEE untuk Menguji Resistansi Insulasi Mesin yang Berputar.”
a) Merekomendasikan kombinasi seragam dari hasil pengujian yang dapat digunakan untuk mengevaluasi kondisi mesin dan transformator yang berputar.
b) Memberikan panduan umum untuk metode pembacaan pengukuran rangkaian rotor induksi dan interpretasi hasil.
c) Tentukan jenis pengukuran yang digunakan untuk menentukan jenis insulasi antar-belokan, insulasi dinding-tanah, dan gangguan mesin berputar lainnya.
2. Referensi
Berikut ini adalah referensi yang berhubungan dengan standar ini.
a) IEEE Std 43-2000: Praktik yang Direkomendasikan IEEE untuk Menguji Resistensi Isolasi Mesin Berputar
b) IEEE Std 56-1977: Panduan IEEE untuk Pemeliharaan Insulasi Mesin Berputar Arus Bolak-balik Besar (10.000 kVA dan Lebih Besar)
c) IEEE Std 118 ñ 1978: Kode Uji Standar IEEE untuk Pengukuran Resistensi
d) IEEE Std 120-1989: Panduan Uji Utama IEEE untuk Pengukuran Listrik di Rangkaian Daya
e) IEEE Std 388 ñ 1992: Standar IEEE untuk Transformator dan Induktor dalam Peralatan Konversi Daya Elektronik
f) IEEE Std 389 ñ 1996: Praktik yang Direkomendasikan IEEE untuk Pengujian Transformator dan Induktor Elektronik
g) IEEE Std 1068 ñ 1990: Praktik yang Direkomendasikan IEEE untuk Perbaikan dan Penggulungan Ulang Motor untuk Industri Perminyakan dan Kimia
3. Pertimbangan Keamanan
Istilah ‘analisis rangkaian belitan statis’ didefinisikan sebagai metode pengujian yang dilakukan pada peralatan yang tidak diberi energi. Instrumen yang digunakan harus mengikuti beberapa sertifikasi yang diakui seperti UL, CE, CSA, atau yang setara. Tidaklah mungkin untuk mencakup semua aspek keselamatan dalam panduan ini. Personel penguji harus membaca buku petunjuk produsen, serikat pekerja, perusahaan, dan peraturan pemerintah.
4. Analisis Rangkaian Belitan Teori Umum
4.1 SIRKUIT MAGNETIK
Kumparan listrik dan mesin terdiri dari kombinasi sirkuit elektro-magnetik yang digabungkan. Sirkuit magnetik dikembangkan sebagai hasil dari arus listrik yang melewati konduktor dan dipandu melalui bahan magnetik.
Pertama, pertimbangkan konduktor dengan panjang l yang ditempatkan pada sudut yang tepat ke kutub magnet sambil membawa arus I. Hasilnya adalah gaya level F, di mana B adalah besarnya kerapatan fluks magnetik (dalam Tesla, atau T) dan fluks magnetik adalah pengukuran kekuatan magnet. Formula yang dihasilkan ditemukan sebagai:
Formula 1 Kekuatan (Newton)
F = BI l
Berdasarkan posisi sembarang konduktor dengan l adalah vektor dengan magnitudo l dalam arah arus.
Rumus 2: Gaya dengan Posisi Konduktor Sewenang-wenang
F = Il x B
Dengan mengasumsikan B konstan besarnya dengan area A:
Rumus 3: Fluks Magnetik (Φ, Webber)
Φ = BA atau B = Φ/A
B dinyatakan sebagai Webber (Wb) / m
Hubungan antara I dan B adalah sebagai berikut:
Rumus 4: Hukum Sirkuit Ampereís
A/m * d * l = I
Di mana A/m adalah intensitas medan magnet H
Apabila rangkaian tertutup dilewati oleh arus sebanyak N kali, misalnya dalam sebuah kumparan, maka gaya gerak magnet yang dihasilkan (mmf atau ℑ) adalah sebagai berikut:
Formula 5: MMF
ℑ = NI
NI juga dikenal sebagai putaran Ampere (At). N yang terdiri dari satu akan dikenal sebagai satu putaran.í
Induktansi (L) didefinisikan sebagai hubungan fluks per unit arus yang ditunjukkan sebagai unit Henry (H).1
Rumus 6: Induktansi
L = (NΦ) / I
Untuk luka toroid dengan kumparan yang berbeda, induktansi dapat ditentukan:
Formula 7: Bidang Toroid1
Lpq = (Np (kpqΦq)) / iq
Energi yang tersimpan dalam induktansi dapat dihitung, dengan membawa arus (i):
Rumus 8: Energi Induktif
W = (1/2) Li 2
Frekuensi mempengaruhi medan di dalam konduktor. Ketika frekuensi yang diterapkan meningkat, arus dan medan yang dihasilkan bergerak lebih dekat ke permukaan konduktor (efek kulit). Hal ini disebabkan oleh fakta bahwa ada ggl yang diinduksi dalam konduktor yang memiliki fluks bolak-balik. Ggl ini lebih besar di pusat daripada di keliling, sehingga perbedaan potensial cenderung membentuk arus yang menentang arus di pusat dan membantunya di keliling. Dengan demikian, arus dipaksa ke luar konduktor, mengurangi area efektif konduktor.î2
1 Mesin Listrik dan Elektromekanik, Syed A Nasar, Seri Garis Besar Schaum, 1981
2 Buku Pegangan Standar untuk Insinyur Listrik, Edisi Keempat Belas, Donald G Fink, Wayne Beaty, McGraw Hill, 2000.
4.2 SISTEM ISOLASI
“Isolasi listrik adalah media atau bahan yang, ketika ditempatkan di antara konduktor pada potensi yang berbeda, hanya memungkinkan arus yang dapat diabaikan dalam fase dengan tegangan yang diterapkan untuk mengalir melaluinya. Istilah dielektrik hampir identik dengan isolasi listrik, yang dapat dianggap sebagai dielektrik terapan. Dielektrik yang sempurna tidak melewatkan arus konduksi dan hanya arus pengisian kapasitif di antara konduktor. “2 (Lihat juga IEEE Std 120-1989, Bagian 5.4.2)
Representasi rangkaian dielektrik yang paling sederhana adalah resistor paralel dan kapasitor. Kapasitansi antara konduktor (dalam ruang hampa) adalah 0,0884 x 10-12 A/t di mana A adalah luas konduktor dalam sentimeter persegi dan t adalah jarak konduktor dalam sentimeter. “Ketika bahan dielektrik mengisi volume di antara elektroda, kapasitansi menjadi lebih tinggi berdasarkan muatan di dalam molekul dan atom bahan, yang menarik lebih banyak muatan ke bidang kapasitor untuk tegangan yang sama. Kapasitansi dengan dielektrik di antara elektroda adalah: “3
Rumus 9: Kapasitansi Antara Konduktor Melingkar Paralel
C = (2π∈í∈oL)/cosh-1(D/2r)
Permitivitas sistem insulasi menurun ke bawah (daerah dispersi) dengan peningkatan frekuensi yang diterapkan, seperti halnya polarisasi antarmuka ionik dan polarisasi dipolar molekuler. Pada polimer, dispersi dipolar terjadi pada frekuensi yang sangat rendah.
4.3 KERUSAKAN ISOLASI
Kerusakan isolasi, yang disebut sebagai ëfaultsí dalam pedoman ini, termasuk kontaminasi, pelacakan busur, penuaan termal, dan kesalahan mekanis. Setiap jenis gangguan memiliki faktor yang sama: Sifat resistif dan kapasitif dari isolasi listrik berubah.
Kontaminasi, khususnya penetrasi air, meningkatkan konduktivitas isolasi. Air cenderung terkumpul dalam retakan isolasi dan inklusi di dalam sistem isolasi. Medan listrik menyebabkan perubahan pada kontaminan, termasuk pemuaian, yang selanjutnya akan merusak sistem insulasi. Kontaminan lain, termasuk gas, uap, debu, dll., dapat menyerang susunan kimiawi sistem insulasi. Setelah sistem insulasi sepenuhnya dijembatani, sistem kemudian dianggap korslet. Hal ini biasanya akan terjadi pertama kali di antara konduktor, di mana sistem insulasi adalah yang paling lemah. Area gangguan utama meliputi bagian kumparan yang tidak diamankan, seperti putaran akhir mesin yang berputar (yang juga merupakan titik tegangan listrik tertinggi dari belitan), dan titik tegangan mekanis tertinggi, seperti titik kumparan meninggalkan slot pada mesin yang berputar.
Pelacakan busur api pada sistem insulasi terjadi ketika arus tinggi melintas di antara konduktor di permukaan sistem insulasi. Insulasi pada titik-titik tersebut mengalami karbonisasi, mengubah komponen kapasitif dan resistif dari sistem insulasi listrik. Pelacakan busur sering kali disebabkan oleh: Tekanan listrik yang kuat; Kontaminasi; atau, Keduanya. Jenis gangguan ini terutama terjadi di antara konduktor atau kumparan dan biasanya diakhiri dengan korsleting.
Penuaan termal dari sistem isolasi terjadi karena sistem isolasi listrik menurun sebagai akibat dari Persamaan Kimia Arrhenius. Aturan praktis yang diterima secara umum adalah umur termal sistem insulasi berkurang setengahnya untuk setiap kenaikan suhu operasi 10o C. Insulasi akan cepat rusak dan berkarbonisasi setelah mencapai batas suhu untuk sistem insulasi.
Faktor lingkungan lainnya juga memengaruhi masa pakai termal sistem insulasi termasuk: Kontaminasi belitan; Kelembaban; Elektrolisis; dan, Tekanan listrik lainnya.
Gangguan mekanis pada sistem isolasi listrik meliputi retak tegangan, getaran, serbuan mekanis, dan gangguan mekanis. Gaya di dalam kumparan selama berbagai operasi, akan menyebabkan gerakan mekanis dan dapat berakhir dengan retaknya bahan isolasi. Getaran listrik dan mekanis menyebabkan tekanan yang tidak semestinya pada sistem insulasi yang mengakibatkan fraktur tegangan dan kelonggaran pada sistem insulasi. Serangan mekanis mencakup pergerakan material ke dalam sistem insulasi baik di antara konduktor dan/atau sistem insulasi ke arde. Kesalahan mekanis termasuk kegagalan seperti kesalahan bantalan, pada mesin yang berputar, yang menyebabkan bantalan terlepas dan melewati komponen sistem yang bergerak. Gangguan ini dapat berakhir sebagai korsleting antara konduktor, kumparan, atau kumparan ke arde.
4.4 Tahapan Kegagalan Isolasi Belitan
Penyebab utama kegagalan belitan meliputi: Kerusakan isolasi (termal); Kontaminasi; Serangan kelembaban; transien; dan tekanan mekanis, dan pertama-tama mengakibatkan kerusakan isolasi antara konduktor dalam kumparan yang sama, antara kumparan dalam fase yang sama, atau antara kumparan dengan fase yang berbeda. Korsleting belitan ini mungkin, tetapi tidak selalu, berakhir sebagai gangguan resistensi isolasi ketika belitan benar-benar gagal. Deteksi perubahan antar konduktor memberikan peluang lebih besar untuk melakukan tindakan perbaikan atau penggantian dini sebelum peralatan berhenti beroperasi. Perhatikan bahwa tingkat gangguan akan tergantung pada tingkat keparahan gangguan (yaitu: rasio belokan) dan potensi antara konduktor (misalnya, gangguan mungkin cenderung terjadi pada peralatan di bawah 600 Vac dan akan gagal dengan cepat pada sistem di atas 1000 Vac.
Tahapan umum gangguan belitan antar konduktor adalah sebagai berikut:
– Tahap 1: Insulasi antara konduktor tertekan, menyebabkan perubahan pada nilai resistif dan kapasitif insulasi pada titik gangguan. Temperatur tinggi dan gangguan reaktif serupa mengakibatkan karbonisasi insulasi (dielektrik) pada titik tersebut. Karbonisasi juga dapat terjadi karena pelacakan di seluruh sistem insulasi.
– Tahap 2: Titik gangguan menjadi lebih resistif. Induktansi timbal balik terjadi antara bagian ëbaikí dari belitan (dan komponen pembawa arus lainnya dari sistem) dan belitan korslet. Kerugian I2 R meningkat pada titik gangguan karena peningkatan arus di dalam belitan korslet, meningkatkan suhu pada titik tersebut dan menyebabkan sistem insulasi berkarbonisasi dengan cepat. Motor mungkin mulai tersandung pada titik ini, meskipun mungkin dapat berjalan setelah periode pendinginan singkat.
– Tahap 3: Isolasi rusak dan energi di dalam titik korsleting dapat menyebabkan pecahnya sistem isolasi secara eksplosif dan penguapan belitan.
4.5 Perbandingan Peralatan
Mesin berputar dan transformator beroperasi berdasarkan prinsip yang sama. Sebagai contoh, motor induksi tiga fase memiliki sirkuit primer (belitan stator) dan sekunder (belitan rotor) seperti halnya belitan primer dan sekunder transformator. Perbedaannya adalah bahwa energi listrik diubah ke nilai energi listrik yang berbeda, dengan transformator. Energi listrik yang sama dikonversi menjadi energi mekanis menggunakan motor listrik.
Gulungan transformator dirancang sedemikian rupa sehingga, umumnya, seimbang di antara fase. Hal ini memungkinkan energi yang seimbang pada impedansi sirkuit sekunder dan impedansi sirkuit yang seimbang di seluruh sistem. Mesin berputar tiga fase (rakitan) memiliki induktansi timbal balik yang berubah seiring dengan perubahan posisi rotor. Hasilnya mungkin berupa ketidakseimbangan induktif yang diuji, dan ketidakseimbangan impedansi yang dihasilkan, dengan rotor terletak di satu posisi sementara ketiga fase diuji. Ketidakseimbangan belitan mesin yang berputar dapat dievaluasi dengan mengkompensasi posisi rotor atau dengan membandingkan pembacaan impedansi dan induktansi.
4.6 Uji Pengukuran untuk Evaluasi
Pengukuran kelistrikan dasar untuk evaluasi transformator dan belitan mesin berputar meliputi:
a) Resistansi (IEEE Std 118-1978, IEEE Std 389-1996) ñ Digunakan untuk mendeteksi variasi ukuran kabel, sambungan, dan sirkuit resistansi terbuka/tinggi.
b) Induktansi (IEEE Std 388-1992: Bagian 5.2 Ketidakseimbangan Induktansi (Impedansi), 5.6.1 Metode Pengukuran Jembatan Induktansi, IEEE Std 120-1989) ñ Induktansi merupakan fungsi dari geometri dan permeabilitas. Hal ini tidak tergantung pada tegangan, arus dan frekuensi. Induktansi keseluruhan yang diukur adalah kombinasi dari induktansi timbal balik dan induktansi internal rangkaian, yang dikenal sebagai induktansi rangkaian. Deteksi kesalahan hanya mungkin dilakukan pada korsleting belitan apabila kapasitansi sistem insulasi dielektrik menjadi resistif dan terjadi korsleting, yang mengakibatkan induktansi timbal balik antara bagian “baik” dari kumparan dan korsleting. Induktansi bersama juga digunakan dalam evaluasi belitan rotor pada mesin yang berputar.
c) Kapasitansi (IEEE Std 389-1996, IEEE Std 120-1989) ñ Digunakan untuk mengukur kapasitansi rangkaian keseluruhan dan kapasitansi isolasi dinding arde. Biasanya menjadi tren dari waktu ke waktu.
d) Impedansi (IEEE Std 388-1992: Bagian 5.2 Ketidakseimbangan Induktansi (Impedansi), IEEE Std 389-1996: Bagian 8.3 Ketidakseimbangan Impedansi, 8.4 Uji Keseimbangan, IEEE Std 120-1989: Bagian 5 Pengukuran Impedansi) ñ Impedansi bergantung pada frekuensi, resistansi, induktansi, dan kapasitansi. Resistansi memiliki dampak yang relatif kecil pada impedansi keseluruhan dan frekuensi yang diterapkan berdampak pada komponen reaktansi induktif dan kapasitif. Peningkatan induktansi memiliki efek aditif terhadap nilai impedansi, sedangkan kapasitansi memiliki dampak terbalik pada impedansi rangkaian. Sebagai contoh, peningkatan induktansi rangkaian keseluruhan akan menghasilkan peningkatan impedansi yang kira-kira paralel, peningkatan kapasitansi rangkaian keseluruhan akan menyebabkan impedansi menurun.
e) Sudut Fase (IEEE Std 120-1989) ñ Sudut fase rangkaian adalah pengukuran waktu jeda antara tegangan dan arus yang disajikan sebagai derajat pemisahan. Hal ini secara langsung dipengaruhi oleh impedansi rangkaian, tegangan dan frekuensi yang diterapkan.
f) Uji Respons Frekuensi (IEEE Std 389-1996: Bagian 11.1 Respons Frekuensi Transformator) ñ Uji respons frekuensi dapat dievaluasi dengan menggunakan beberapa metode. Untuk tujuan panduan ini, evaluasi akan disajikan sebagai persentase pengurangan arus kumparan ketika frekuensi digandakan, yang juga dikenal sebagai uji respons arus/frekuensi. Tanggapan arus/frekuensi dipengaruhi oleh perubahan kapasitansi rangkaian saat frekuensi meningkat.
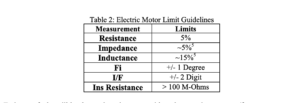
g) Uji Resistensi Isolasi ñ Tercakup dalam IEEE Std 43-2000.
Terlepas dari pengukuran yang diberikan, tujuan utamanya adalah untuk mengidentifikasi ketidakseimbangan antara kumparan yang serupa, seperti antara fase pada mesin berputar tiga fase atau transformator tiga fase.
5.0 Evaluasi Peralatan
5.1 Evaluasi Transformator Tiga Fasa
Saat melakukan pengujian pada transformator tiga fasa dengan menggunakan teknik analisis belitan, sirkuit yang berlawanan dengan sisi yang diuji harus disingkat dan diarde (IEEE Std 388- 1992: Bagian 5.6.1 Metode Pengukuran Jembatan Induksi, IEEE Std 389-1996). Masing-masing dari ketiga fase diukur dan dievaluasi untuk keseimbangan. Lihat Tabel 1 untuk batas hasil pengujian yang direkomendasikan.
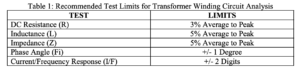
a) Tes Fi dan I/F akan mendeteksi kerusakan isolasi ñ perubahan pada kapasitansi dan resistansi sirkuit sistem isolasi.
b) Pengukuran Induktansi dan Impedansi akan mendeteksi kesalahan belitan tingkat lanjut dan cacat belitan pada saat produksi atau perbaikan.
c) Resistansi digunakan untuk mendeteksi sambungan yang longgar, konduktor yang rusak, dan masalah terkait.
5.2 Evaluasi Mesin Putar Induksi Tiga Fase
Stator dan rotor dievaluasi secara terpisah dengan menggunakan teknik analisis rangkaian belitan. Panduan berikut ini akan membahas keduanya.
5.2.1 Pengujian Rotor Motor Rakitan
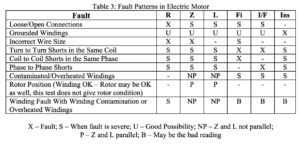
Jenis-jenis kesalahan yang umum terjadi pada rotor motor listrik adalah:
a) Celah udara (Eksentrisitas Rotor): Yang biasanya bukan merupakan kegagalan progresif, kecuali jika ada kelonggaran pada rotor, atau kesalahan di dalam poros motor atau bantalan telah menjadi parah. Masalah kelonggaran, bantalan, dan poros motor dapat dideteksi dengan lebih cepat, dan lebih aman, dengan menggunakan teknik analisis getaran. Masalah celah udara manufaktur dan perbaikan dapat dideteksi dengan analisis rangkaian belitan statis selama pengujian penerimaan atau di pabrik/bengkel perbaikan sebelum waktu yang hilang untuk memasang peralatan. Jenis pengujian penerimaan ini digunakan untuk menentukan apakah celah udara telah disetel dengan benar (+/- 10% dari pembacaan celah udara rata-rata yang diambil di kedua ujung rotor selama pemasangan).4
b) Pengecoran Rongga dan Sambungan Batang Rotor: Yang dapat berkembang menjadi kesalahan “batang rotor patah” seiring waktu. Selalu ada rongga pengecoran pada rotor aluminium cor, variasi dalam paduan aluminium dan variasi pada sambungan batang paduan tembaga yang akan mempengaruhi induktansi. Kesalahan dapat dideteksi dengan mengambil serangkaian pembacaan induktansi atau impedansi rangkaian saat poros diputar 360 derajat. Pembacaan ini dapat dibuat grafik sebagai bentuk gelombang dan melihat adanya gangguan dengan melihat posisi perubahan induktansi dan/atau impedansi gelombang. Perubahan kecil pada kemiringan atau kemiringan bentuk gelombang menunjukkan cacat kecil, biasanya tidak mengganggu, sedangkan perubahan signifikan pada puncak bentuk gelombang menunjukkan kesalahan rotor yang parah. Kesalahan yang parah dapat mengganggu karakteristik pengoperasian motor.
c) Batang Rotor Rusak: Adalah kesalahan progresif yang biasanya terjadi karena pengoperasian motor listrik yang salah. Saat motor listrik dihidupkan, panas menumpuk di rotor karena arus tinggi dan frekuensi tinggi, sehingga memerlukan periode pendinginan. Dalam kasus lain, rotor dapat terhenti, menyebabkan arus tinggi dan frekuensi rotor yang tinggi. Laju pemuaian paduan tembaga (atau aluminium) dan bahan rotor berbeda, sehingga memberikan tekanan mekanis pada batang itu sendiri. Di bawah tekanan yang ekstrem, batang rotor dapat retak, mengurangi kemampuan motor untuk menghasilkan torsi. Saat batang rotor patah, batang rotor di sekitarnya membawa arus tambahan, menyebabkan peningkatan lebih lanjut pada suhu batang rotor dan kemungkinan terjadinya retakan tambahan.
Kemampuan peralatan uji untuk mendeteksi gangguan melalui induktansi dan impedansi disebabkan oleh perubahan induktansi timbal balik rangkaian saat posisi rotor berubah. Karena motor listrik adalah transformator dengan sirkuit sekunder yang berputar, ketika posisi rotor berubah, rasio efektif primer (belitan stator) ke sekunder (belitan rotor) berubah dan induktansi timbal balik secara keseluruhan serta impedansi sirkuit yang dihasilkan berubah. Karena sifat peralatan yang berputar, perubahan dari waktu ke waktu akan berbentuk sinusoidal (atau beberapa variasi) dan simetris.
Proses umum untuk melakukan uji induktansi atau impedansi rotor adalah dengan melakukan pembacaan induktansi atau impedansi secara bertahap hingga 360 derajat rotasi, atau dengan menggunakan uji berbasis induktansi atau impedansi real-time. Hasil tes harus dibuat grafik untuk interpretasi.
5.2.2 Pengujian Stator Peralatan Berputar yang Dirakit
Penilaian hasil pengujian peralatan berputar yang dirakit akan memberikan tingkat akurasi deteksi kesalahan yang berbeda-beda. Sebagai contoh, hasil uji induktansi akan memberikan nilai yang tinggi dan bervariasi karena rotor ditempatkan pada posisi yang berbeda, sehingga posisi rotor harus disesuaikan agar nilai induktansi timbal balik antara belitan primer (stator) dan sekunder (rotor) relatif sama. Namun, induktansi yang digabungkan dengan impedansi menunjukkan dampak kapasitif dari kerusakan isolasi atau kontaminasi belitan. Misalnya, jika impedansi dan induktansi relatif paralel, ketidakseimbangan fasa disebabkan oleh posisi rotor. Jika terjadi pengurangan impedansi setidaknya satu fasa, atau impedansi dan induktansi tidak relatif paralel, maka kapasitansi rangkaian telah berubah yang mengindikasikan kemungkinan kontaminasi belitan atau kerusakan isolasi.
Gangguan belok awal akan terdeteksi sebagai perubahan pada sudut fasa atau respons arus/frekuensi sebagai pergeseran dalam pembacaan. Pergeseran dapat diindikasikan, misalnya, sebagai Fi: 77/76/77 dan/atau I/F: -44/-46/- 44.
5 Pembacaan ketidakseimbangan resistansi dan impedansi hanya dapat dihitung jika posisi rotor diperhitungkan. Pembacaan harus dilakukan pada puncak atau lembah gelombang sinus dari perubahan posisi rotor.
6.0 Daftar Pustaka
a) IEEE Std 43-2000: Praktik yang Direkomendasikan IEEE untuk Menguji Resistensi Isolasi Mesin Berputar
b) IEEE Std 56-1977: Panduan IEEE untuk Pemeliharaan Insulasi Mesin Berputar Arus Bolak-balik Besar (10.000 kVA dan Lebih Besar)
c) IEEE Std 118-1978: Kode Uji Standar IEEE untuk Pengukuran Resistensi
d) IEEE Std 120-1989: Panduan Uji Utama IEEE untuk Pengukuran Listrik di Rangkaian Daya
e) IEEE Std 388-1992: Standar IEEE untuk Transformator dan Induktor pada Peralatan Konversi Daya Elektronik
f) IEEE Std 389-1996: Praktik yang Direkomendasikan IEEE untuk Menguji Trafo dan Induktor Elektronik
g) IEEE Std 1068-1990: Praktik yang Direkomendasikan IEEE untuk Perbaikan dan Penggulungan Ulang Motor untuk Industri Perminyakan dan Kimia
h) Penrose, Dr. Howard W., Analisis Rangkaian Motor: Teori, Aplikasi dan Analisis Energi, SUCCESS by DESIGN, 2001
i) Fink, Donald dan Beaty, H. Wayne, Buku Pegangan Standar untuk Insinyur Listrik, Edisi Keempat Belas, McGraw-Hill, 2000.
j) Sarma, Mulukutl, Mesin-mesin Listrik: Teori Steady-State dan Kinerja Dinamis, Edisi Kedua, Perusahaan Penerbitan PWS, 1996
k) Mazur, Glen dan Proctor, Thomas, Troubleshooting Electric Motors, Edisi Kedua, ATP Publishing, 1997
l) Nasar, Syed, Mesin Listrik dan ElektroMagnetik, McGraw-Hill, 1981

AT34™
Menganalisis dan membuat tren integritas komponen motor untuk gangguan arde, gangguan belitan internal, koneksi terbuka, dan kontaminasi – semuanya dengan satu perangkat genggam.

Seminar Diagnostik Motor Kelas Dunia Online – Level 1 – 12-16 Juni
Kau sudah dengar? Kami akan mengadakan Seminar Diagnostik Motor Kelas Dunia Level 1 pada tanggal 12-16 Juni. Ini akan menjadi seminar online/virtual yang dimulai setiap hari pada pukul 8 pagi […]

Prakonferensi 15-16 Juni 2023 Leon, Meksiko
Bergabunglah dengan Manajer Regional LATAM ATP, Gloria Urizar, saat ia hadir di Preconlub 2023! Detail lebih lanjut: https://www.preconlub.com/ Gloria Urizar Manajer Regional – […]