Rotating Machine Testing Guidelines
1. Overview
1.1 Scope
This document describes a guideline for evaluating rotating equipment armature and field windings, rated from 1 horsepower (746 Watts) or greater, for winding shorts, phase unbalances and rotor bars. It applies to induction machines and transformers.
The document describes typical static winding circuit analysis measurements and how these measurements indicate machine condition. It provides guidelines as to the limits for circuit measurements.
The types of measurements reviewed are provided by individual or collections of instrumentation that provide basic winding circuit measurements such as resistance, impedance, inductance, capacitance and specialized test measurements. It is recognized that the measurement techniques shall include (Reference: IEEE Std 120-1989):
a) Direct current resistance measurements shall use direct current values.
b) Alternating current measurements, such as inductance and impedance, shall be alternating current using sine-wave measurements as selected by the instrument manufacturer.
c) All measurements are to be evaluated through bridged circuits and are reported within the limits of such bridges. Standard engineering units of measurement are not to be calculated, such as inductance and impedance, except where the values are presented as ratios, degrees or percentages.
At the time of the initial draft of this guideline, output voltage, to provide test results in all but the ground-wall insulation measurements, are in the electronic range and usually found under 10 Volts AC/DC. Standard output frequencies for these instruments also generally range above 100 Hz. If instrumentation is developed using sound engineering principles which exceed these values, or if additional values are provided which provide an accurate view of the motor circuit, they may be included within the scope of this guideline.
1.2 Purpose
The purpose of this guideline is to outline methods and common data collected using winding circuit analysis and to provide guidance in the interpretation of the results for both inter-turn insulation, ground-wall insulation and the evaluation of squirrel-cage rotors. Ground-wall insulation measurement methods and test results shall reference the current revision of IEEE Standard 43, ìIEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery.”
a) Recommend uniform combinations of test results that can be used to evaluate the condition of rotating machinery and transformers.
b) Provide general guidelines for the method of readings for induction rotor circuit measurements and interpretation of results.
c) Define the types of measurements used to determine types of inter-turn insulation, ground-wall insulation and other rotating machinery faults.
2. References
Following are references that relate to this standard.
a) IEEE Std 43-2000: IEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery
b) IEEE Std 56-1977: IEEE Guide for Insulation Maintenance of Large Alternating Current Rotating Machinery (10,000 kVA and Larger)
c) IEEE Std 118 ñ 1978: IEEE Standard Test Code for Resistance Measurements
d) IEEE Std 120-1989: IEEE Master Test Guide for Electrical Measurements in Power Circuits
e) IEEE Std 388 ñ 1992: IEEE Standard for Transformers and Inductors in Electronic Power Conversion Equipment
f) IEEE Std 389 ñ 1996: IEEE Recommended Practice for Testing Electronics Transformers and Inductors
g) IEEE Std 1068 ñ 1990: IEEE Recommended Practice for the Repair and Rewinding of Motors for the Petroleum and Chemical Industry
3. Safety Considerations
The term ‘static winding circuit analysis’ is defined as a test method performed on deenergized equipment. The instruments used must follow some recognized certification such as UL, CE, CSA, or equivalent. It is not possible to cover all safety aspects in this guideline. Test personnel should consult manufacturers instruction manuals, union, company and government regulations.
4. Winding Circuit Analysis General Theory
4.1 MAGNETIC CIRCUITS
Electrical coils and machines are made up of a combination of coupled electro-magnetic circuits. The magnetic circuits are developed as a result of electrical current passing through conductors and guided through magnetic materials.
First, consider a conductor of length l placed at right angles to the poles of a magnet while carrying a current I. The result is a force of level F, where B is the magnitude of the magnetic flux density (in Tesla, or T) and magnetic flux is the measurement of the strength of magnetism. The resulting formula is found as:
Formula 1: Force (Newtons)
F = BI l
Based upon the arbitrary position of a conductor with l being a vector of magnitude l in the direction of the current.
Formula 2: Force with Arbitrary Conductor Position
F = Il x B
Assuming B is constant in magnitude with area A:
Formula 3: Magnetic Flux (Φ, Webber)
Φ = BA or B = Φ/A
B is expressed as Webber(Wb)/m
The relationship between I and B is as follows:
Formula 4: Ampereís Circuital Law
A/m *d*l = I
Where A/m is the magnetic field intensity H
When a closed circuit is passed by the current N times, such as in a coil, then the resulting magnetomotive force (mmf or ℑ) is as follows:
Formula 5: MMF
ℑ = NI
NI is also known as the Ampere turns (At). An N of one will be known as one ëturn.í
The Inductance (L) is defined as the flux linkage per unit of current shown as units of Henry (H).1
Formula 6: Inductance
L = (NΦ)/I
For a toroid wound with ëní distinct coils, the inductances may be defined:
Formula 7: Toroid Fields1
Lpq = (Np(kpqΦq))/iq
The energy stored in an inductance can be calculated, carrying a current (i):
Formula 8: Inductive Energy
W = (1/2)Li 2
Frequency impacts the fields within a conductor. As the applied frequency is increased, the current, and resulting fields, travel closer to the surface of the conductor (skin effect). ìThis is due to the fact that there are induced emfís in a conductor in which there is alternating flux. These emfís are greater at the center than at the circumference, so the potential difference tends to establish currents that oppose the current at the center and assist it at the circumference. The current is thus forced to the outside of the conductor, reducing the effective area of the conductor.î2
1 Electric Machines and Electromechanics, Syed A Nasar, Schaumís Outline Series, 1981
2 Standard Handbook for Electrical Engineers, Fourteenth Edition, Donald G Fink, Wayne Beaty, McGraw Hill, 2000.
4.2 INSULATION SYSTEMS
“Electrical insulation is a medium or a material which, when placed between conductors at different potentials, permits only a negligible current in phase with the applied voltage to flow through it. The term dielectric is almost synonymous with electrical insulation, which can be considered the applied dielectric. A perfect dielectric passes no conduction current and only capacitive charging current between conductors.”2 (Also see IEEE Std 120-1989, Section 5.4.2)
The simplest circuit representation of a dielectric is a parallel resistor and capacitor. The capacitance between conductors (in a vacuum) is 0.0884 x 10-12 A/t where A is the area of the conductor in square centimeters and t is the spacing of the conductors in centimeters. “When a dielectric material fills the volume between the electrodes, the capacitance is higher by virtue of the charges within the molecules and atoms of the material, which attract more charge to the capacitor planes for the same applied voltage. The capacitance with the dielectric between the electrodes is: “3
Formula 9: Capacitance Between Parallel Circular Conductors
C = (2π∈í∈oL)/cosh-1(D/2r)
The permittivity of insulation systems decrease downward (dispersion region) with an increase in applied frequency, as does the ionic-interface polarization and the molecular dipolar polarizations. In polymers, dipolar dispersion occurs in very low frequencies.
4.3 INSULATION BREAKDOWN
Insulation breakdown, termed as ëfaultsí within this guideline, include contamination, arc tracking, thermal aging and mechanical faults. Each type of fault carries a common factor: The resistive and capacitive properties of the electrical insulation change.
Contamination, in particular water penetration, increases the insulation conductivity. The water tends to collect in insulation fractures and inclusions within the insulation system. The electrical fields cause changes to the contaminants, including expansion, which further break down the insulation system. Other contaminants, including gasses, vapors, dust, etc., can attack the chemical makeup of the insulation system. Once the insulation system is completely bridged the system is then considered shorted. This normally will occur first between conductors, where the insulation system is the weakest. Key fault areas include the non-secured portion of the coil, such as the end-turns of a rotating machine (which also is the highest electrical stress point of the windings), and the highest mechanical stress point, such as the point the coils leave the slots on a rotating machine.
Arc tracking of insulation systems occur where high current passes between conductors across the surface of an insulation system. The insulation at those points carbonize, changing the capacitive and resistive components of the electrical insulation system. Arc tracking is often the result of: Strong electrical stresses; Contamination; or, Both. This type of fault primarily occurs between conductors or coils and normally ends with a short.
Thermal aging of an insulation system occurs as electrical insulation systems degrade as a result of the Arrhenius Chemical Equation. The generally accepted ìrule of thumbî is that the thermal life of the insulation system halves for every 10o C increase in operating temperature. The insulation will quickly degrade and carbonize once it obtains the temperature limit for the insulation system.
Other environmental factors also impact the thermal life of the insulation system including: Winding contamination; Moisture; Electrolysis; and, Other electrical stresses.
Mechanical faults in the electrical insulation system include stress cracking, vibration, mechanical incursion, and mechanical faults. The forces within a coil during various operations, will cause mechanical movement and may end in the fracturing of insulation materials. Electrical and mechanical vibration cause undue stress on the insulation system resulting in stress fractures and looseness of the insulation system. Mechanical incursion includes the movement of materials into the insulation system either between conductors and/or insulation system to ground. Mechanical faults include failures such as bearing faults, in rotating machines, that cause the bearing to come apart and pass through the moving components of the system. These faults may end as shorts between conductors, coils, or coil to ground.
4.4 Stages of Winding Insulation Failure
Primary causes of winding failure include: Insulation (thermal) breakdown; Contamination; Moisture incursion; transients; and mechanical stresses, and first result in a breakdown of insulation between conductors within the same coil, between coils in the same phase or between coils of separate phases. These winding ëshortsí may, but not always, end up as an insulation resistance fault when the winding actually fails. Detection of changes between conductors provides a greater chance of early repair or replace action before equipment stops operating. Note that the rate of fault will depend upon the severity of the fault (ie: turns ratio) and the potential between conductors (for instance, faults may be trended in equipment under 600 Vac and will rapidly fail in systems over 1000 Vac.
The general stages of a winding fault between conductors is as follows:
• Stage 1: The insulation between conductors is stressed, causing a change to the resistive and capacitive values of the insulation at the fault point. High temperatures and similar reactive faults result in carbonization of the insulation (dielectric) at that point. Carbonization may also occur due to tracking across the insulation system.
• Stage 2: The point of fault becomes more resistive. A mutual inductance occurs between the ëgoodí portion of the winding (and other current carrying components of the system) and the shorting turns. I2 R losses increase at the point of the fault due to the increase in current within the shorting turns, increasing the temperature at that point and causing the insulation system to carbonize quickly. The motor may start tripping at this point, although it may be able to run after a short cooling period.
• Stage 3: Insulation breaks down and the energy within the point of the short can cause an explosive rupture in the insulation system and vaporization of the windings.
4.5 Comparison of Equipment
Rotating machinery and transformers operate due to similar principles. For instance, a three-phase induction motor has a primary (stator winding) and secondary (rotor winding) circuit just as with a transformerís primary and secondary windings. The difference is that the electrical energy is transformed to a different value of electrical energy, with transformers. The same electrical energy is converted to mechanical energy using an electric motor.
Transformer windings are designed so that they are, commonly, balanced between phases. This allows for balanced energy on the secondary and balanced circuit impedances throughout the system. Three-phase rotating machines (assembled) have changing mutual inductance as rotor position changes. The result may be a tested inductive unbalance, and resulting impedance unbalance, with the rotor located in one position while all three phases are tested. Rotating machinery winding unbalances can be evaluated by either compensating for the rotor position or by comparing readings of impedance and inductance.
4.6 Test Measurements for Evaluation
Basic electrical measurements for the evaluation of transformer and rotating machinery windings include:
a) Resistance (IEEE Std 118-1978, IEEE Std 389-1996) ñ Used for detecting variations in wire size, connections and open/high resistance circuits.
b) Inductance (IEEE Std 388-1992: Section 5.2 Inductance (Impedance) Unbalance, 5.6.1 Inductance Bridge Method of Measurement, IEEE Std 120-1989) ñ Inductance is a function of geometry and permeability. It is independent of voltage, current and frequency. The overall inductance measured is a combination of the mutual and internal inductances of the circuit, known as circuit inductance. Fault detection is possible in winding shorts only when the capacitances of dielectric insulation systems become resistive and a shorted circuit exists, resulting in mutual inductance between the “good” part of the coil and shorted turns. Mutual inductance is also used in the evaluation of rotor windings in rotating machines.
c) Capacitance (IEEE Std 389-1996, IEEE Std 120-1989) ñ Used for measuring the overall circuit capacitance and the ground wall insulation capacitance. Normally trended over time.
d) Impedance (IEEE Std 388-1992: Section 5.2 Inductance (Impedance) Unbalance, IEEE Std 389-1996: Section 8.3 Impedance Unbalance, 8.4 Balance Tests, IEEE Std 120-1989: Section 5 Impedance Measurements) ñ Impedance is frequency, resistance, inductance and capacitance dependent. Resistance has a relatively small impact on the overall impedance and the applied frequency impacts the inductive and capacitive reactance components. Increases in inductance have a additive effect to the impedance values while capacitance has an inverse impact on circuit impedance. For instance, an increase in the overall circuit inductance will generate a roughly parallel increase in impedance, an increase in the overall circuit capacitance will cause the impedance to decrease.
e) Phase Angle (IEEE Std 120-1989) ñ The circuit phase angle is a measurement of the lag time between voltage and current presented as degrees of separation. It is directly impacted by the circuit impedance, voltage and frequency applied.
f) Frequency Response Tests (IEEE Std 389-1996: Section 11.1 Transformer Frequency Response) ñ Frequency response tests can be evaluated using a number of methods. For purposes of this guideline, the evaluation will be presented as the percentage reduction in current of a coil when the frequency is doubled, also known as the current/frequency response test. Current/frequency responses are impacted by changes to the capacitances of the circuit as the frequency increases.
g) Insulation Resistance Tests ñ Covered under IEEE Std 43-2000.
Regardless of the measurements provided, the primary purpose is to identify unbalances between like coils, such as between phases in a three-phase rotating machine or threephase transformer.
5.0 Evaluation of Equipment
5.1 Evaluation of Three-Phase Transformers
While performing tests on three-phase transformers using winding analysis techniques, the circuit opposite the side being tested must be shorted and grounded (IEEE Std 388- 1992: Section 5.6.1 Induction Bridge Method of Measurement, IEEE Std 389-1996). Each of the three phases are measured and evaluated for balance. See Table 1 for recommended test result limits.
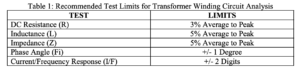
a) Fi and I/F tests will detect insulation breakdown ñ changes to the insulation system circuit capacitances and resistances.
b) Inductance and Impedance measurements will detect advanced winding faults and turn defects in manufacturing or repair.
c) Resistance is used to detect loose connections, broken conductors and related issues.
5.2 Evaluation of Three-Phase Induction Rotating Machines
The stator and rotor are separately evaluated using winding circuit analysis techniques. The following guidelines will cover both.
5.2.1 Assembled Motor Rotor Testing
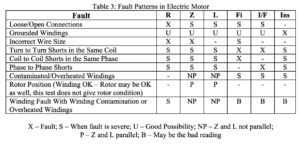
The types of faults common to electric motor rotors are:
a) Air gap (Rotor Eccentricity): Which is normally not a progressive failure, unless there is looseness in the rotor, or a fault within either the motor shaft or bearings has become severe. Looseness, bearings and motor shaft issues can be detected faster, and safer, using vibration analysis techniques. Manufacturing and repair air gap issues can be detected with static winding circuit analysis during acceptance testing or at the manufacturer/repair shop prior to time lost installing the equipment. This type of acceptance testing is used to determine if the air gap has been set properly (+/- 10% of average airgap reading taken at either end of the rotor during installation).4
b) Casting Voids and Rotor Bar Connections: Which may progress to ëbroken rotor barí faults over time. There are always casting voids in cast aluminum rotors, variations in the aluminum alloy and variations in the joints of copper alloy bars that will effect inductance. The faults can be detected by taking a series of circuit inductance or impedance readings as the shaft is rotated 360 degrees. These readings can be graphed as a waveform and viewed for faults by looking at the position of inductance and/or impedance changes of the waveform. A small change on the incline or slope of the waveform indicates a small, usually non-intrusive defect, while a significant change at the peak of the waveform indicate severe rotor faults. Severe faults may interfere with the operating characteristics of the motor.
c) Broken Rotor Bars: Are progressive faults that normally occur due to incorrect operation of the electric motor. As an electric motor is started, heat builds up in the rotor due to high currents and high frequency, requiring a cool-down period. In other cases, a rotor may be stalled, causing high currents and high rotor frequencies. The expansion rate of the copper alloys (or aluminum) and the rotor materials are different, putting mechanical stress on the bars themselves. Under extreme stress, the rotor bars may crack, reducing the ability of the motor to produce torque. As rotor bars fracture, the surrounding rotor bars carry additional current, causing a further increase in rotor bar temperatures and possibility that additional cracks will occur.
The ability of test equipment to detect faults through inductance and impedance is due to changes in the mutual inductance of the circuit as the rotor position changes. As an electric motor is a transformer with a rotating secondary circuit, when the rotor position changes the effective primary (stator windings) to secondary (rotor windings) ratio changes and the overall mutual inductance and resulting circuit impedance changes. Because of the nature of rotating equipment, the changes over time will be sinusoidal (or some variation) and symmetrical.
The general process for performing either a rotor inductance or impedance test is to take inductance or impedance readings in even increments through 360 degrees of rotation, or by using a real-time inductance or impedance based test. The test results should be graphed for interpretation.
5.2.2 Assembled Rotating Equipment Stator Testing
The assessment of assembled rotating equipment test results will provide varying degrees of fault detection accuracy. For instance, inductance test results will provide high and varying degrees of value as the rotor is placed in different positions, so the rotor position has to be adjusted so that the values of mutual inductance between the primary (stator) and secondary (rotor) windings are relatively the same. However, inductance coupled with impedance shows the capacitive impact of insulation breakdown or contamination of the winding. For instance, if the impedance and inductance are relatively parallel, the phase unbalance would be due to rotor position. If there is a reduction in impedance of at least one phase, or the impedance and inductance are not relatively parallel, then the circuit capacitance has changed indicating possible winding contamination or insulation breakdown.
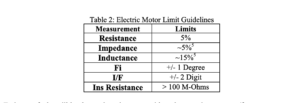
Early turn faults will be detected as changes to either phase angle or current/frequency response as a ëshiftí in readings. A shift can be indicated, for example, as Fi: 77/76/77 and/or I/F: -44/-46/- 44.
5 The resistance and impedance unbalance readings can only be counted if the rotor position is accounted for. The readings must be taken at either a peak or valley of the sine wave from the change of rotor position.
6.0 Bibliography
a) IEEE Std 43-2000: IEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery
b) IEEE Std 56-1977: IEEE Guide for Insulation Maintenance of Large Alternating Current Rotating Machinery (10,000 kVA and Larger)
c) IEEE Std 118-1978: IEEE Standard Test Code for Resistance Measurements
d) IEEE Std 120-1989: IEEE Master Test Guide for Electrical Measurements in Power Circuits
e) IEEE Std 388-1992: IEEE Standard for Transformers and Inductors in Electronic Power Conversion Equipment
f) IEEE Std 389-1996: IEEE Recommended Practice for Testing Electronics Transformers and Inductors
g) IEEE Std 1068-1990: IEEE Recommended Practice for the Repair and Rewinding of Motors for the Petroleum and Chemical Industry
h) Penrose, Dr. Howard W., Motor Circuit Analysis: Theory, Application and Energy Analysis, SUCCESS by DESIGN, 2001
i) Fink, Donald and Beaty, H. Wayne, Standard Handbook for Electrical Engineers, Fourteenth Edition, McGraw-Hill, 2000.
j) Sarma, Mulukutl, Electric Machines: Steady-State Theory and Dynamic Performance, Second Edition, PWS Publishing Company, 1996
k) Mazur, Glen and Proctor, Thomas, Troubleshooting Electric Motors, Second Edition, ATP Publishing, 1997
l) Nasar, Syed, Electric Machines and ElectroMagnetics, McGraw-Hill, 1981
ATPOL III™
Comprehensively analyze power quality and electrical motor component integrity on AC/DC motors, generators, and transformers.

PVT-Hybrid Seminar MCA Level 1 – 08/04/2026-08/06/2026
8:30 am - 5:00 pm PLEASE CONTACT [email protected] AND MENTION REF#125-13896 FOR MORE INFORMATION. First Name * E-mail * Company Phone* Product of Interest* —Please choose an option—AT34EV™AT34™AT7™AT7™ PROFESSIONALATPOL III™MDIII™ALL-SAFE [...]
PVT-Hybrid Seminar ESA Level 1 – 08/11/2026-08/13/2026
8:30am-5:00pm EST PLEASE CONTACT [email protected] AND MENTION REF#125-13889 FOR MORE INFORMATION. First Name * E-mail * Company Phone* Product of Interest* —Please choose an option—AT34EV™AT34™AT7™AT7™ PROFESSIONALATPOL III™MDIII™ALL-SAFE PRO®AccessoriesSoftwareTechnical Support ConsultingOther [...]