Wytyczne dotyczące testowania maszyn wirujących
1. Przegląd
1.1 Zakres
Niniejszy dokument opisuje wytyczne dotyczące oceny uzwojeń twornika i pola urządzeń wirujących o mocy znamionowej od 1 KM (746 W) wzwyż pod kątem zwarć uzwojeń, asymetrii faz i prętów wirnika. Dotyczy to maszyn indukcyjnych i transformatorów.
W dokumencie opisano typowe pomiary analizy obwodu uzwojenia statycznego oraz sposób, w jaki pomiary te wskazują stan maszyny. Zawiera wytyczne dotyczące limitów dla pomiarów obwodów.
Przeglądane rodzaje pomiarów są wykonywane przez pojedyncze urządzenia lub zestawy urządzeń, które zapewniają podstawowe pomiary obwodów uzwojenia, takie jak rezystancja, impedancja, indukcyjność, pojemność i specjalistyczne pomiary testowe. Uznaje się, że techniki pomiarowe powinny obejmować (odniesienie: IEEE Std 120-1989):
a) Pomiary rezystancji prądem stałym powinny wykorzystywać wartości prądu stałego.
b) Pomiary prądu przemiennego, takie jak indukcyjność i impedancja, powinny być pomiarami prądu przemiennego z wykorzystaniem fali sinusoidalnej zgodnie z wyborem producenta przyrządu.
c) Wszystkie pomiary mają być oceniane poprzez zmostkowane obwody i są raportowane w granicach takich mostków. Nie należy obliczać standardowych inżynierskich jednostek miary, takich jak indukcyjność i impedancja, z wyjątkiem przypadków, gdy wartości są przedstawiane jako współczynniki, stopnie lub procenty.
W czasie opracowywania wstępnej wersji niniejszych wytycznych, napięcie wyjściowe, zapewniające wyniki testów we wszystkich pomiarach oprócz pomiarów izolacji ścian uziemiających, mieści się w zakresie elektronicznym i zwykle wynosi poniżej 10 V AC/DC. Standardowe częstotliwości wyjściowe dla tych instrumentów również zazwyczaj przekraczają 100 Hz. Jeśli oprzyrządowanie zostało opracowane przy użyciu solidnych zasad inżynieryjnych, które przekraczają te wartości, lub jeśli zapewniono dodatkowe wartości, które zapewniają dokładny obraz obwodu silnika, mogą one zostać uwzględnione w zakresie niniejszych wytycznych.
1.2 Cel
Celem niniejszych wytycznych jest przedstawienie metod i wspólnych danych zebranych przy użyciu analizy obwodu uzwojenia oraz dostarczenie wskazówek dotyczących interpretacji wyników zarówno dla izolacji międzyzwojowej, izolacji uziemienia, jak i oceny wirników klatkowych. Metody pomiaru izolacji ścian uziemiających i wyniki testów powinny odnosić się do aktualnej wersji normy IEEE 43, “IEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery”.
a) Zaleca jednolite kombinacje wyników testów, które mogą być wykorzystane do oceny stanu maszyn wirujących i transformatorów.
b) Przedstawić ogólne wytyczne dotyczące metody odczytu pomiarów obwodu wirnika indukcyjnego i interpretacji wyników.
c) Określić rodzaje pomiarów stosowanych do określania typów izolacji międzyzwojowej, izolacji uziemienia i innych usterek maszyn wirujących.
2. Odniesienia
Poniżej znajdują się odniesienia do niniejszego standardu.
a) IEEE Std 43-2000: Zalecana praktyka IEEE dotycząca testowania rezystancji izolacji maszyn wirujących
b) IEEE Std 56-1977: Przewodnik IEEE dotyczący konserwacji izolacji dużych maszyn wirujących prądu przemiennego (10 000 kVA i większych)
c) IEEE Std 118 ñ 1978: Standardowy kodeks testowy IEEE dla pomiarów rezystancji
d) IEEE Std 120-1989: IEEE Master Test Guide for Electrical Measurements in Power Circuits (Główny przewodnik IEEE dotyczący pomiarów elektrycznych w obwodach zasilania)
e) IEEE Std 388 ñ 1992: IEEE Standard for Transformers and Inductors in Electronic Power Conversion Equipment (Norma IEEE dla transformatorów i cewek w elektronicznych urządzeniach do przetwarzania energii)
f) IEEE Std 389 ñ 1996: Zalecana przez IEEE praktyka testowania transformatorów elektronicznych i cewek indukcyjnych
g) IEEE Std 1068 ñ 1990: IEEE Recommended Practice for the Repair and Rewinding of Motors for the Petroleum and Chemical Industry (Zalecana praktyka naprawy i przezwajania silników dla przemysłu naftowego i chemicznego)
3. Kwestie bezpieczeństwa
Termin “statyczna analiza obwodu uzwojenia” jest definiowany jako metoda testowa przeprowadzana na urządzeniach pozbawionych napięcia. Używane przyrządy muszą posiadać uznane certyfikaty, takie jak UL, CE, CSA lub równoważne. Nie jest możliwe uwzględnienie wszystkich aspektów bezpieczeństwa w niniejszych wytycznych. Personel przeprowadzający testy powinien zapoznać się z instrukcjami producenta, przepisami związkowymi, firmowymi i rządowymi.
4. Analiza obwodu uzwojenia Teoria ogólna
4.1 OBWODY MAGNETYCZNE
Cewki i maszyny elektryczne składają się z kombinacji sprzężonych obwodów elektromagnetycznych. Obwody magnetyczne powstają w wyniku przepływu prądu elektrycznego przez przewodniki i kierowania go przez materiały magnetyczne.
Najpierw rozważmy przewodnik o długości l umieszczony pod kątem prostym do biegunów magnesu, w którym płynie prąd o natężeniu I. Wynikiem jest siła na poziomie F, gdzie B jest wielkością gęstości strumienia magnetycznego (w Teslach lub T), a strumień magnetyczny jest miarą siły magnetyzmu. Wynikowa formuła ma postać
Formuła 1: Siła (niutony)
F = BI l
W oparciu o arbitralne położenie przewodnika z l będącym wektorem o wielkości l w kierunku prądu.
Wzór 2: Siła z dowolną pozycją przewodnika
F = Il x B
Zakładając, że B ma stałą wielkość w stosunku do obszaru A:
Wzór 3: Strumień magnetyczny (Φ, Webber)
Φ = BA lub B = Φ/A
B jest wyrażona jako Webber(Wb)/m
Zależność między I i B jest następująca:
Wzór 4: Prawo obwodów Ampere’a
A/m *d*l = I
Gdzie A/m oznacza natężenie pola magnetycznego H
Gdy zamknięty obwód jest przepuszczany przez prąd N razy, na przykład w cewce, wówczas wynikowa siła magnetomotoryczna (mmf lub ℑ) jest następująca:
Wzór 5: MMF
ℑ = NI
NI jest również znany jako Ampere turns (At). Liczba N równa jeden będzie określana jako jeden “obrót”.
Indukcyjność (L) jest definiowana jako strumień na jednostkę prądu wyrażony w jednostkach Henry’ego (H).1
Wzór 6: Indukcyjność
L = (NΦ)/I
Dla toroidu nawiniętego z ëní różnych cewek, indukcyjności mogą być zdefiniowane:
Wzór 7: Pola toroidalne1
Lpq = (Np(kpqΦq))/iq
Energię zmagazynowaną w indukcyjności można obliczyć, przenosząc prąd (i):
Wzór 8: Energia indukcyjna
W = (1/2)Li 2
Częstotliwość ma wpływ na pola wewnątrz przewodnika. Wraz ze wzrostem zastosowanej częstotliwości, prąd i wynikające z niego pola przemieszczają się bliżej powierzchni przewodnika (efekt naskórkowości). Wynika to z faktu, że w przewodniku, w którym występuje zmienny strumień, indukowane są pola elektromagnetyczne. Emisje te są większe w środku niż na obwodzie, więc różnica potencjałów ma tendencję do tworzenia prądów, które przeciwstawiają się prądowi w środku i wspomagają go na obwodzie. W ten sposób prąd jest wypychany na zewnątrz przewodnika, zmniejszając jego efektywną powierzchnię.î2
1 Maszyny elektryczne i elektromechanika, Syed A Nasar, Schaumís Outline Series, 1981
2 Standardowy podręcznik dla inżynierów elektryków, wydanie czternaste, Donald G Fink, Wayne Beaty, McGraw Hill, 2000.
4.2 SYSTEMY IZOLACJI
“Izolacja elektryczna to medium lub materiał, który po umieszczeniu między przewodnikami o różnych potencjałach pozwala na przepływ przez niego jedynie znikomego prądu w fazie z przyłożonym napięciem. Termin dielektryk jest prawie synonimem izolacji elektrycznej, którą można uznać za zastosowany dielektryk. Idealny dielektryk nie przepuszcza prądu przewodzenia, a jedynie pojemnościowy prąd ładowania między przewodnikami. “2 (Patrz także IEEE Std 120-1989, sekcja 5.4.2)
Najprostszą reprezentacją obwodu dielektryka jest równoległy rezystor i kondensator. Pojemność między przewodnikami (w próżni) wynosi 0,0884 x 10-12 A/t, gdzie A to powierzchnia przewodnika w centymetrach kwadratowych, a t to odległość między przewodnikami w centymetrach. “Gdy materiał dielektryczny wypełnia objętość między elektrodami, pojemność jest wyższa dzięki ładunkom w cząsteczkach i atomach materiału, które przyciągają więcej ładunku do płaszczyzn kondensatora przy tym samym przyłożonym napięciu. Pojemność z dielektrykiem między elektrodami wynosi: “3
Wzór 9: Pojemność między równoległymi przewodnikami okrągłymi
C = (2π∈í∈oL)/cosh-1(D/2r)
Przenikalność systemów izolacyjnych zmniejsza się w dół (obszar dyspersji) wraz ze wzrostem zastosowanej częstotliwości, podobnie jak polaryzacja jonowo-interfejsowa i molekularna polaryzacja dipolarna. W polimerach dyspersja dipolarna występuje przy bardzo niskich częstotliwościach.
4.3 PODZIAŁ IZOLACJI
Uszkodzenia izolacji, określane w niniejszych wytycznych jako “usterki”, obejmują zanieczyszczenie, śledzenie łuku elektrycznego, starzenie termiczne i usterki mechaniczne. Każdy rodzaj usterki ma wspólny czynnik: Zmiana właściwości rezystancyjnych i pojemnościowych izolacji elektrycznej.
Zanieczyszczenia, w szczególności wnikanie wody, zwiększają przewodność izolacji. Woda ma tendencję do gromadzenia się w pęknięciach izolacji i wtrąceniach w systemie izolacji. Pola elektryczne powodują zmiany w zanieczyszczeniach, w tym ekspansję, która dodatkowo niszczy system izolacji. Inne zanieczyszczenia, w tym gazy, opary, kurz itp., mogą wpływać na skład chemiczny systemu izolacji. Gdy system izolacji zostanie całkowicie zmostkowany, system uznaje się za zwarty. Zwykle występuje to najpierw między przewodnikami, gdzie system izolacji jest najsłabszy. Kluczowe obszary uszkodzeń obejmują niezabezpieczoną część cewki, taką jak końcowe zwoje obracającej się maszyny (która jest również punktem największego naprężenia elektrycznego uzwojeń) oraz punkt największego naprężenia mechanicznego, taki jak punkt, w którym cewki opuszczają szczeliny obracającej się maszyny.
Śledzenie łuku w systemach izolacyjnych występuje, gdy wysoki prąd przepływa między przewodnikami przez powierzchnię systemu izolacyjnego. Izolacja w tych punktach ulega zwęgleniu, zmieniając komponenty pojemnościowe i rezystancyjne systemu izolacji elektrycznej. Śledzenie łuku jest często wynikiem silnych naprężeń elektrycznych; zanieczyszczenia; lub obu. Ten typ usterki występuje głównie między przewodnikami lub cewkami i zwykle kończy się zwarciem.
Starzenie termiczne systemu izolacji występuje, gdy systemy izolacji elektrycznej ulegają degradacji w wyniku równania chemicznego Arrheniusa. Ogólnie przyjęta zasada mówi, że trwałość termiczna systemu izolacji zmniejsza się o połowę na każde 10o C wzrostu temperatury roboczej. Izolacja ulegnie szybkiej degradacji i zwęgleniu po osiągnięciu temperatury granicznej dla systemu izolacyjnego.
Inne czynniki środowiskowe również wpływają na trwałość termiczną systemu izolacji, w tym: zanieczyszczenie uzwojenia, wilgoć, elektroliza i inne naprężenia elektryczne.
Usterki mechaniczne w systemie izolacji elektrycznej obejmują pękanie naprężeniowe, wibracje, wtargnięcie mechaniczne i usterki mechaniczne. Siły występujące w cewce podczas różnych operacji powodują ruch mechaniczny i mogą prowadzić do pękania materiałów izolacyjnych. Wibracje elektryczne i mechaniczne powodują nadmierne naprężenia w systemie izolacyjnym, powodując pęknięcia naprężeniowe i poluzowanie systemu izolacyjnego. Naruszenie mechaniczne obejmuje przemieszczanie się materiałów do układu izolacyjnego pomiędzy przewodami i/lub układem izolacyjnym a uziemieniem. Usterki mechaniczne obejmują awarie, takie jak usterki łożysk w maszynach wirujących, które powodują, że łożysko rozpada się i przechodzi przez ruchome elementy systemu. Usterki te mogą kończyć się zwarciem między przewodami, cewkami lub cewką a uziemieniem.
4.4 Etapy uszkodzenia izolacji uzwojenia
Podstawowe przyczyny awarii uzwojenia obejmują: uszkodzenie izolacji (termiczne); zanieczyszczenie; przedostanie się wilgoci; stany nieustalone; oraz naprężenia mechaniczne i w pierwszej kolejności skutkują uszkodzeniem izolacji między przewodnikami w tej samej cewce, między cewkami w tej samej fazie lub między cewkami w oddzielnych fazach. Te “zwarcia” uzwojenia mogą, ale nie zawsze, zakończyć się usterką rezystancji izolacji, gdy uzwojenie faktycznie ulegnie awarii. Wykrywanie zmian między przewodami zapewnia większą szansę na wczesną naprawę lub wymianę, zanim sprzęt przestanie działać. Należy pamiętać, że szybkość usterki będzie zależeć od ciężkości usterki (tj. współczynnika zwojów) i potencjału między przewodami (na przykład usterki mogą być trendowane w sprzęcie poniżej 600 Vac i szybko ulegną awarii w systemach powyżej 1000 Vac).
Ogólne etapy usterki uzwojenia między przewodnikami są następujące:
– Etap 1: Izolacja między przewodnikami jest obciążona, powodując zmianę wartości rezystancyjnych i pojemnościowych izolacji w punkcie uszkodzenia. Wysokie temperatury i podobne usterki reaktywne powodują zwęglenie izolacji (dielektryka) w tym punkcie. Zwęglenie może również wystąpić z powodu śledzenia przez system izolacji.
– Etap 2: Punkt usterki staje się bardziej oporny. Wzajemna indukcyjność występuje pomiędzy “dobrą” częścią uzwojenia (i innymi elementami systemu przenoszącymi prąd) a zwojami zwarciowymi. Straty I2 R wzrastają w punkcie awarii z powodu wzrostu prądu w zwojach zwarciowych, zwiększając temperaturę w tym punkcie i powodując szybkie zwęglenie układu izolacyjnego. Silnik może zacząć się wyłączać w tym momencie, chociaż może być w stanie pracować po krótkim okresie chłodzenia.
– Etap 3: Izolacja ulega uszkodzeniu, a energia w punkcie zwarcia może spowodować wybuchowe pęknięcie systemu izolacji i odparowanie uzwojeń.
4.5 Porównanie urządzeń
Maszyny wirujące i transformatory działają na podobnych zasadach. Na przykład, trójfazowy silnik indukcyjny ma obwód pierwotny (uzwojenie stojana) i wtórny (uzwojenie wirnika), podobnie jak w przypadku uzwojenia pierwotnego i wtórnego transformatora. Różnica polega na tym, że energia elektryczna jest przekształcana w inną wartość energii elektrycznej za pomocą transformatorów. Ta sama energia elektryczna jest przekształcana w energię mechaniczną za pomocą silnika elektrycznego.
Uzwojenia transformatorów są projektowane w taki sposób, aby były zwykle zrównoważone między fazami. Pozwala to na zrównoważenie energii na obwodzie wtórnym i zrównoważenie impedancji obwodu w całym systemie. Trójfazowe maszyny wirujące (zmontowane) mają zmieniającą się indukcyjność wzajemną wraz ze zmianą położenia wirnika. Rezultatem może być testowana nierównowaga indukcyjna i wynikająca z niej nierównowaga impedancji, z wirnikiem umieszczonym w jednej pozycji, podczas gdy testowane są wszystkie trzy fazy. Niewyważenie uzwojenia maszyny wirującej można ocenić poprzez kompensację położenia wirnika lub porównanie odczytów impedancji i indukcyjności.
4.6 Pomiary testowe na potrzeby oceny
Podstawowe pomiary elektryczne do oceny uzwojeń transformatorów i maszyn wirujących obejmują:
a) Rezystancja (IEEE Std 118-1978, IEEE Std 389-1996) ñ Służy do wykrywania zmian rozmiaru przewodów, połączeń i obwodów otwartych/wysokiej rezystancji.
b) Indukcyjność (IEEE Std 388-1992: Sekcja 5.2 Niezrównoważenie indukcyjności (impedancji), 5.6.1 Metoda pomiaru mostka indukcyjności, IEEE Std 120-1989) ñ Indukcyjność jest funkcją geometrii i przenikalności. Jest on niezależny od napięcia, natężenia i częstotliwości. Całkowita zmierzona indukcyjność jest kombinacją indukcyjności wzajemnej i wewnętrznej obwodu, znanej jako indukcyjność obwodu. Wykrywanie usterek w zwarciach uzwojeń jest możliwe tylko wtedy, gdy pojemności dielektrycznych układów izolacyjnych stają się rezystancyjne i istnieje zwarty obwód, co powoduje wzajemną indukcyjność między “dobrą” częścią cewki a zwartymi zwojami. Wzajemna indukcyjność jest również wykorzystywana do oceny uzwojeń wirnika w maszynach wirujących.
c) Pojemność (IEEE Std 389-1996, IEEE Std 120-1989) ñ Służy do pomiaru całkowitej pojemności obwodu i pojemności izolacji ściany uziemiającej. Normalnie trend w czasie.
d) Impedancja (IEEE Std 388-1992: Sekcja 5.2 Niezrównoważenie indukcyjności (impedancji), IEEE Std 389-1996: Sekcja 8.3 Niezrównoważenie impedancji, 8.4 Testy równowagi, IEEE Std 120-1989: Sekcja 5 Pomiary impedancji) ñ Impedancja zależy od częstotliwości, rezystancji, indukcyjności i pojemności. Rezystancja ma stosunkowo niewielki wpływ na ogólną impedancję, a zastosowana częstotliwość wpływa na składowe reaktancji indukcyjnej i pojemnościowej. Wzrost indukcyjności ma addytywny wpływ na wartości impedancji, podczas gdy pojemność ma odwrotny wpływ na impedancję obwodu. Na przykład, wzrost ogólnej indukcyjności obwodu wygeneruje w przybliżeniu równoległy wzrost impedancji, wzrost ogólnej pojemności obwodu spowoduje spadek impedancji.
e) Kąt fazowy (IEEE Std 120-1989) ñ Kąt fazowy obwodu jest pomiarem czasu opóźnienia między napięciem a prądem przedstawionym jako stopnie separacji. Ma na nią bezpośredni wpływ impedancja obwodu, zastosowane napięcie i częstotliwość.
f) Testy odpowiedzi częstotliwościowej (IEEE Std 389-1996: Sekcja 11.1 Odpowiedź częstotliwościowa transformatora) ñ Testy odpowiedzi częstotliwościowej mogą być oceniane przy użyciu wielu metod. Do celów niniejszych wytycznych ocena zostanie przedstawiona jako procentowa redukcja prądu cewki przy podwojeniu częstotliwości, znana również jako test odpowiedzi prąd/częstotliwość. Na odpowiedzi prąd/częstotliwość wpływają zmiany pojemności obwodu wraz ze wzrostem częstotliwości.
g) Testy rezystancji izolacji ñ Objęte normą IEEE Std 43-2000.
Niezależnie od wykonywanych pomiarów, głównym celem jest identyfikacja niewyważenia między podobnymi cewkami, np. między fazami w trójfazowej maszynie wirującej lub transformatorze trójfazowym.
5.0 Ocena sprzętu
5.1 Ocena transformatorów trójfazowych
Podczas przeprowadzania testów transformatorów trójfazowych przy użyciu technik analizy uzwojeń, obwód po przeciwnej stronie testowanej strony musi być zwarty i uziemiony (IEEE Std 388-1992: Sekcja 5.6.1 Metoda pomiaru mostka indukcyjnego, IEEE Std 389-1996). Każda z trzech faz jest mierzona i oceniana pod kątem równowagi. Zalecane limity wyników testów znajdują się w tabeli 1.
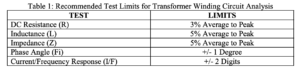
a) Testy Fi i I/F wykryją uszkodzenie izolacji – zmiany pojemności i rezystancji obwodu układu izolacyjnego.
b) Pomiary indukcyjności i impedancji pozwalają wykryć zaawansowane usterki uzwojenia i wady produkcyjne lub naprawcze.
c) Rezystancja jest używana do wykrywania luźnych połączeń, uszkodzonych przewodów i powiązanych problemów.
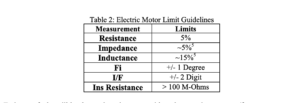
5.2 Ocena trójfazowych indukcyjnych maszyn wirujących
Stojan i wirnik są oceniane oddzielnie przy użyciu technik analizy obwodu uzwojenia. Poniższe wytyczne dotyczą obu tych kwestii.
5.2.1 Testowanie zmontowanego wirnika silnika
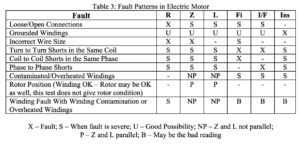
Rodzaje usterek typowych dla wirników silników elektrycznych są następujące:
a) Szczelina powietrzna (mimośrodowość wirnika): Zwykle nie jest to postępująca awaria, chyba że występuje luz w wirniku lub usterka wału silnika lub łożysk stała się poważna. Luzy, problemy z łożyskami i wałem silnika mogą być wykrywane szybciej i bezpieczniej przy użyciu technik analizy drgań. Problemy związane ze szczeliną powietrzną podczas produkcji i naprawy można wykryć za pomocą statycznej analizy obwodu uzwojenia podczas testów akceptacyjnych lub u producenta/warsztatu naprawczego przed utratą czasu na instalację sprzętu. Ten rodzaj testów akceptacyjnych służy do określenia, czy szczelina powietrzna została ustawiona prawidłowo (+/- 10% średniego odczytu szczeliny powietrznej pobranego na obu końcach wirnika podczas instalacji).4
b) Pustki odlewnicze i połączenia prętów wirnika: Z czasem może dojść do pęknięcia pręta wirnika. W odlewanych wirnikach aluminiowych zawsze występują puste przestrzenie, różnice w stopie aluminium i różnice w połączeniach prętów ze stopu miedzi, które wpływają na indukcyjność. Usterki można wykryć, wykonując serię odczytów indukcyjności lub impedancji obwodu podczas obracania wału o 360 stopni. Odczyty te można przedstawić na wykresie w postaci fali i sprawdzić pod kątem usterek, patrząc na położenie zmian indukcyjności i/lub impedancji fali. Niewielka zmiana nachylenia fali wskazuje na niewielką, zwykle nieinwazyjną usterkę, podczas gdy znaczna zmiana na szczycie fali wskazuje na poważne usterki wirnika. Poważne usterki mogą wpływać na charakterystykę pracy silnika.
c) Uszkodzone pręty wirnika: Są to postępujące usterki, które zwykle występują z powodu nieprawidłowego działania silnika elektrycznego. Po uruchomieniu silnika elektrycznego w wirniku gromadzi się ciepło z powodu wysokich prądów i wysokiej częstotliwości, co wymaga okresu chłodzenia. W innych przypadkach wirnik może utknąć w martwym punkcie, powodując wysokie prądy i wysokie częstotliwości wirnika. Szybkość rozszerzania się stopów miedzi (lub aluminium) i materiałów wirnika jest różna, co powoduje naprężenia mechaniczne na samych prętach. Pod wpływem ekstremalnych naprężeń pręty wirnika mogą pękać, zmniejszając zdolność silnika do wytwarzania momentu obrotowego. Gdy pręty wirnika pękają, otaczające je pręty wirnika przenoszą dodatkowy prąd, powodując dalszy wzrost temperatury prętów wirnika i możliwość wystąpienia dodatkowych pęknięć.
Zdolność sprzętu testowego do wykrywania usterek poprzez indukcyjność i impedancję wynika ze zmian wzajemnej indukcyjności obwodu wraz ze zmianą położenia wirnika. Ponieważ silnik elektryczny jest transformatorem z wirującym obwodem wtórnym, gdy zmienia się położenie wirnika, zmienia się efektywny stosunek uzwojenia pierwotnego (uzwojenia stojana) do wtórnego (uzwojenia wirnika), a także zmienia się ogólna wzajemna indukcyjność i wynikająca z niej impedancja obwodu. Ze względu na charakter obracającego się sprzętu, zmiany w czasie będą sinusoidalne (lub ich pewna odmiana) i symetryczne.
Ogólny proces przeprowadzania testu indukcyjności lub impedancji wirnika polega na dokonywaniu odczytów indukcyjności lub impedancji w równych przyrostach przez 360 stopni obrotu lub przy użyciu testu opartego na indukcyjności lub impedancji w czasie rzeczywistym. Wyniki testu powinny zostać przedstawione na wykresie w celu ich interpretacji.
5.2.2 Testowanie stojana zmontowanego urządzenia obrotowego
Ocena wyników testów zmontowanego sprzętu wirującego zapewni różny stopień dokładności wykrywania usterek. Na przykład, wyniki testu indukcyjności będą dostarczać wysokich i zmiennych wartości, gdy wirnik jest umieszczony w różnych pozycjach, więc pozycja wirnika musi być dostosowana tak, aby wartości wzajemnej indukcyjności między uzwojeniem pierwotnym (stojanem) i wtórnym (wirnikiem) były względnie takie same. Jednak indukcyjność w połączeniu z impedancją pokazuje pojemnościowy wpływ uszkodzenia izolacji lub zanieczyszczenia uzwojenia. Na przykład, jeśli impedancja i indukcyjność są względnie równoległe, asymetria faz wynikałaby z położenia wirnika. Jeśli występuje spadek impedancji co najmniej jednej fazy lub impedancja i indukcyjność nie są względnie równoległe, wówczas pojemność obwodu uległa zmianie, co wskazuje na możliwe zanieczyszczenie uzwojenia lub uszkodzenie izolacji.
Wczesne usterki będą wykrywane jako zmiany kąta fazowego lub odpowiedzi prądowej/częstotliwościowej jako “przesunięcie” w odczytach. Przesunięcie może być wskazywane na przykład jako Fi: 77/76/77 i/lub I/F: -44/-46/- 44.
5 Odczyty niezrównoważenia rezystancji i impedancji można policzyć tylko wtedy, gdy uwzględniona jest pozycja wirnika. Odczyty muszą być wykonane w szczycie lub dolinie fali sinusoidalnej od zmiany położenia wirnika.
6.0 Bibliografia
a) IEEE Std 43-2000: Zalecana praktyka IEEE dotycząca testowania rezystancji izolacji maszyn wirujących
b) IEEE Std 56-1977: Przewodnik IEEE dotyczący konserwacji izolacji dużych maszyn wirujących prądu przemiennego (10 000 kVA i większych)
c) IEEE Std 118-1978: Standardowy kodeks testowy IEEE dla pomiarów rezystancji
d) IEEE Std 120-1989: IEEE Master Test Guide for Electrical Measurements in Power Circuits (Główny przewodnik IEEE dotyczący pomiarów elektrycznych w obwodach zasilania)
e) IEEE Std 388-1992: Standard IEEE dla transformatorów i cewek indukcyjnych w elektronicznych urządzeniach do konwersji mocy
f) IEEE Std 389-1996: IEEE Recommended Practice for Testing Electronics Transformers and Inductors (Zalecana praktyka testowania transformatorów elektronicznych i cewek indukcyjnych)
g) IEEE Std 1068-1990: IEEE Recommended Practice for the Repair and Rewinding of Motors for the Petroleum and Chemical Industry (Zalecana praktyka naprawy i przezwajania silników dla przemysłu naftowego i chemicznego)
h) Penrose, Dr. Howard W., Motor Circuit Analysis: Teoria, zastosowanie i analiza energetyczna, SUCCESS by DESIGN, 2001
i) Fink, Donald i Beaty, H. Wayne, Standard Handbook for Electrical Engineers, wydanie czternaste, McGraw-Hill, 2000.
j) Sarma, Mulukutl, Electric Machines: Teoria stanu ustalonego i parametry dynamiczne, Wydanie drugie, Wydawnictwo PWS, 1996
k) Mazur, Glen i Proctor, Thomas, Troubleshooting Electric Motors, wydanie drugie, ATP Publishing, 1997.
l) Nasar, Syed, Electric Machines and ElectroMagnetics, McGraw-Hill, 1981.

AT34™
Analizuj i monitoruj integralność komponentów silnika pod kątem usterek uziemienia, wewnętrznych usterek uzwojenia, otwartych połączeń i zanieczyszczeń – wszystko za pomocą jednego ręcznego urządzenia.

Światowej klasy seminarium diagnostyczne online – poziom 1 – 12-16 czerwca
Słyszałeś? W dniach 12-16 czerwca odbędzie się światowej klasy seminarium diagnostyki samochodowej na poziomie 1. Będzie to seminarium online/wirtualne rozpoczynające się każdego dnia o 8:00 EST. Jest to świetna okazja […]

Preconlub 15-16 czerwca 2023 Leon, Meksyk
Dołącz do Glorii Urizar, regionalnej menedżerki ATP na region Ameryki Łacińskiej, która wystąpi na Preconlub 2023! Więcej szczegółów: https://www.preconlub.com/ Gloria Urizar Kierownik regionalny […]