Linee guida per i test sulle macchine rotanti
1. Overview
1.1 Scope of application
This document describes a guideline for evaluating field and armature windings of rotating equipment rated 1 horsepower (746 watts) or more for winding short circuits, phase imbalances, and rotor bars. It applies to induction machines and transformers.
The document describes typical measurements for static winding circuit analysis and how these measurements indicate machine condition. It provides guidelines on circuit measurement limits.
The types of measurements discussed are provided by single instruments or collections of instruments that provide basic winding circuit measurements such as resistance, impedance, inductance, capacitance, and specialized test measurements. It is recognized that measurement techniques should include (reference: IEEE Std 120-1989):
a) DC resistance measurements must use DC values.
b) Le misure di corrente alternata, come l’induttanza e l’impedenza, devono essere effettuate in corrente alternata utilizzando misure ad onda sinusoidale come selezionato dal produttore dello strumento.
c) Tutte le misure devono essere valutate attraverso circuiti a ponte e sono riportate entro i limiti di tali ponti. Le unità di misura ingegneristiche standard non devono essere calcolate, come l’induttanza e l’impedenza, tranne quando i valori sono presentati come rapporti, gradi o percentuali.
Al momento della stesura iniziale di questa linea guida, le tensioni di uscita, per fornire i risultati dei test in tutte le misure dell’isolamento della parete di terra, tranne quella di terra, sono nell’intervallo elettronico e di solito si trovano al di sotto dei 10 Volt CA/CC. Anche le frequenze di uscita standard di questi strumenti sono generalmente superiori a 100 Hz. Se la strumentazione sviluppata secondo principi ingegneristici validi supera questi valori, o se vengono forniti valori aggiuntivi che forniscono una visione accurata del circuito del motore, essi possono essere inclusi nell’ambito di questa linea guida.
1.2 Scopo
Lo scopo di questa linea guida è quello di delineare i metodi e i dati comuni raccolti utilizzando l’analisi del circuito di avvolgimento e di fornire una guida all’interpretazione dei risultati sia per l’isolamento tra i giri, sia per l’isolamento delle pareti di terra e per la valutazione dei rotori a gabbia di scoiattolo. I metodi di misurazione dell’isolamento della parete di terra e i risultati delle prove devono fare riferimento alla revisione attuale dello standard IEEE 43, ìIEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery”.
a) Raccomandare combinazioni uniformi di risultati di test che possono essere utilizzati per valutare le condizioni delle macchine rotanti e dei trasformatori.
b) Fornire linee guida generali per il metodo di lettura delle misure del circuito del rotore a induzione e l’interpretazione dei risultati.
c) Definire i tipi di misurazioni utilizzate per determinare i tipi di isolamento intergiro, isolamento della parete di terra e altri guasti delle macchine rotanti.
2. Riferimenti
Di seguito sono riportati i riferimenti relativi a questo standard.
a) IEEE Std 43-2000: IEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery (Pratica raccomandata per testare la resistenza di isolamento delle macchine rotanti).
b) IEEE Std 56-1977: Guida IEEE per la manutenzione dell’isolamento di grandi macchine rotanti a corrente alternata (10.000 kVA e oltre).
c) IEEE Std 118 ñ 1978: Codice di prova standard IEEE per le misure di resistenza
d) IEEE Std 120-1989: IEEE Master Test Guide for Electrical Measurements in Power Circuits (Guida alle prove elettriche nei circuiti di potenza)
e) IEEE Std 388 ñ 1992: Standard IEEE per trasformatori e induttori in apparecchiature elettroniche di conversione di potenza
f) IEEE Std 389 ñ 1996: IEEE Recommended Practice for Testing Electronics Transformers and Inductors (Pratica raccomandata per il collaudo di trasformatori e induttori elettronici)
g) IEEE Std 1068 ñ 1990: Pratica raccomandata dall’IEEE per la riparazione e il riavvolgimento di motori per l’industria petrolifera e chimica.
3. Considerazioni sulla sicurezza
Il termine “analisi statica del circuito di avvolgimento” è definito come un metodo di prova eseguito su apparecchiature prive di tensione. Gli strumenti utilizzati devono seguire una certificazione riconosciuta come UL, CE, CSA o equivalente. In questa linea guida non è possibile trattare tutti gli aspetti della sicurezza. Il personale addetto ai test deve consultare i manuali di istruzione del produttore, le norme sindacali, aziendali e governative.
4. Analisi del circuito di avvolgimento Teoria generale
4.1 CIRCUITI MAGNETICI
Le bobine e le macchine elettriche sono costituite da una combinazione di circuiti elettromagnetici accoppiati. I circuiti magnetici si sviluppano come risultato di una corrente elettrica che passa attraverso i conduttori e viene guidata attraverso i materiali magnetici.
In primo luogo, si consideri un conduttore di lunghezza l posto ad angolo retto rispetto ai poli di un magnete e che trasporta una corrente I. Il risultato è una forza di livello F, dove B è la grandezza della densità di flusso magnetico (in Tesla, o T) e il flusso magnetico è la misura della forza del magnetismo. La formula risultante è la seguente:
Formula 1: Forza (Newton)
F = BI l
Basato sulla posizione arbitraria di un conduttore con l che è un vettore di grandezza l nella direzione della corrente.
Formula 2: Forza con posizione arbitraria del conduttore
F = Il x B
Supponendo che B sia costante in grandezza con l’area A:
Formula 3: Flusso magnetico (Φ, Webber)
Φ = BA o B = Φ/A
B è espresso come Webber(Wb)/m
La relazione tra I e B è la seguente:
Formula 4: legge di Ampere
A/m *d*l = I
Dove A/m è l’intensità del campo magnetico H
Quando un circuito chiuso viene attraversato dalla corrente N volte, come in una bobina, la forza magnetomotrice risultante (mmf o ℑ) è la seguente:
Formula 5: MMF
ℑ = NI
NI è anche noto come Ampere turns (At). Un N di uno sarà noto come un ëgiro.í
L’induttanza (L) è definita come il flusso di collegamento per unità di corrente indicato in unità di Henry (H).1
Formula 6: Induttanza
L = (NΦ)/I
Per un toroide avvolto con ëní spire distinte, le induttanze possono essere definite:
Formula 7: Campi toroidali1
Lpq = (Np(kpqΦq))/iq
È possibile calcolare l’energia immagazzinata in un’induttanza che trasporta una corrente (i):
Formula 8: Energia induttiva
W = (1/2)Li 2
La frequenza influisce sui campi all’interno di un conduttore. All’aumentare della frequenza applicata, la corrente e i campi risultanti si avvicinano alla superficie del conduttore (effetto pelle). Ciò è dovuto al fatto che in un conduttore in cui c’è un flusso alternato ci sono delle emfís indotte. Queste emfís sono maggiori al centro che alla circonferenza, quindi la differenza di potenziale tende a stabilire correnti che si oppongono alla corrente al centro e la aiutano alla circonferenza. La corrente viene così forzata verso l’esterno del conduttore, riducendo l’area effettiva del conduttore.î2
1 Macchine elettriche ed elettromeccanica, Syed A Nasar, Collana Schaumís Outline, 1981
2 Manuale standard per ingegneri elettrici, quattordicesima edizione, Donald G Fink, Wayne Beaty, McGraw Hill, 2000.
4.2 SISTEMI DI ISOLAMENTO
“L’isolamento elettrico è un mezzo o un materiale che, interposto tra conduttori a diverso potenziale, permette di attraversare solo una corrente trascurabile in fase con la tensione applicata”. Il termine dielettrico è quasi sinonimo di isolamento elettrico, che può essere considerato il dielettrico applicato. Un dielettrico perfetto non fa passare alcuna corrente di conduzione, ma solo una corrente di carica capacitiva tra i conduttori “2 (vedere anche IEEE Std 120-1989, sezione 5.4.2).
La rappresentazione circuitale più semplice di un dielettrico è quella di un resistore e di un condensatore in parallelo. La capacità tra conduttori (nel vuoto) è pari a 0,0884 x 10-12 A/t, dove A è l’area del conduttore in centimetri quadrati e t è la distanza tra i conduttori in centimetri. “Quando un materiale dielettrico riempie il volume tra gli elettrodi, la capacità è maggiore in virtù delle cariche all’interno delle molecole e degli atomi del materiale, che attirano più carica sui piani del condensatore a parità di tensione applicata. La capacità con il dielettrico tra gli elettrodi è: “3
Formula 9: Capacità tra conduttori circolari paralleli
C = (2π∈í∈oL)/cosh-1(D/2r)
La permittività dei sistemi isolanti diminuisce verso il basso (regione di dispersione) con l’aumento della frequenza applicata, così come la polarizzazione dell’interfaccia ionica e le polarizzazioni dipolari molecolari. Nei polimeri, la dispersione dipolare si verifica a frequenze molto basse.
4.3 DISGREGAZIONE DELL’ISOLAMENTO
I guasti all’isolamento, definiti “guasti” in questa linea guida, comprendono la contaminazione, l’inseguimento dell’arco, l’invecchiamento termico e i guasti meccanici. Ogni tipo di guasto ha un fattore comune: Le proprietà resistive e capacitive dell’isolamento elettrico cambiano.
La contaminazione, in particolare la penetrazione dell’acqua, aumenta la conduttività dell’isolamento. L’acqua tende a raccogliersi nelle fratture dell’isolamento e nelle inclusioni all’interno del sistema isolante. I campi elettrici provocano cambiamenti nei contaminanti, tra cui l’espansione, che provoca un’ulteriore rottura del sistema di isolamento. Altri contaminanti, tra cui gas, vapori, polveri, ecc. possono attaccare la composizione chimica del sistema di isolamento. Una volta che il sistema di isolamento è completamente ponticellato, il sistema è considerato in cortocircuito. Di solito si verifica prima tra i conduttori, dove il sistema di isolamento è più debole. Le aree di guasto principali includono la parte non fissata della bobina, come i giri finali di una macchina rotante (che è anche il punto di massima sollecitazione elettrica degli avvolgimenti), e il punto di massima sollecitazione meccanica, come il punto in cui le bobine lasciano le scanalature di una macchina rotante.
L’inseguimento dell’arco nei sistemi di isolamento si verifica quando una corrente elevata passa tra i conduttori attraverso la superficie di un sistema di isolamento. L’isolamento in questi punti si carbonizza, modificando i componenti capacitivi e resistivi del sistema di isolamento elettrico. Il tracciamento dell’arco è spesso il risultato di: forti sollecitazioni elettriche, contaminazione o entrambi. Questo tipo di guasto si verifica principalmente tra i conduttori o le bobine e normalmente si conclude con un cortocircuito.
L’invecchiamento termico di un sistema di isolamento si verifica quando i sistemi di isolamento elettrico si degradano per effetto dell’equazione chimica di Arrhenius. La regola empirica generalmente accettata è che la durata termica del sistema di isolamento si dimezza per ogni aumento di 10o C della temperatura di esercizio. L’isolante si degrada e carbonizza rapidamente una volta raggiunta la temperatura limite del sistema di isolamento.
Anche altri fattori ambientali influiscono sulla durata termica del sistema di isolamento, tra cui: contaminazione dell’avvolgimento, umidità, elettrolisi e altre sollecitazioni elettriche.
I guasti meccanici nel sistema di isolamento elettrico includono cricche da stress, vibrazioni, incursioni meccaniche e guasti meccanici. Le forze all’interno di una bobina, durante le varie operazioni, causano movimenti meccanici che possono portare alla rottura dei materiali isolanti. Le vibrazioni elettriche e meccaniche causano sollecitazioni eccessive sul sistema di isolamento, con conseguenti fratture da stress e allentamento del sistema di isolamento. L’incursione meccanica comprende il movimento di materiali nel sistema di isolamento tra i conduttori e/o il sistema di isolamento a terra. I guasti meccanici comprendono guasti come quelli dei cuscinetti, nelle macchine rotanti, che causano il distacco del cuscinetto e il passaggio attraverso i componenti in movimento del sistema. Questi guasti possono manifestarsi come cortocircuiti tra conduttori, bobine o bobine verso terra.
4.4 Fasi del guasto dell’isolamento dell’avvolgimento
Le cause principali di guasto degli avvolgimenti sono: rottura dell’isolamento (termico), contaminazione, infiltrazione di umidità, transitori e sollecitazioni meccaniche, che si traducono in una rottura dell’isolamento tra i conduttori della stessa bobina, tra le bobine della stessa fase o tra le bobine di fasi separate. Questi ëcorti di avvolgimentoí possono, anche se non sempre, trasformarsi in un guasto della resistenza di isolamento quando l’avvolgimento si guasta effettivamente. Il rilevamento delle alterazioni tra i conduttori offre una maggiore possibilità di intervento tempestivo per la riparazione o la sostituzione prima che l’apparecchiatura smetta di funzionare. Si noti che la velocità di guasto dipenderà dalla gravità del guasto (cioè dal rapporto di spire) e dal potenziale tra i conduttori (ad esempio, i guasti possono essere rilevati in apparecchiature con tensione inferiore a 600 Vca e si guasteranno rapidamente in sistemi con tensione superiore a 1000 Vca).
Le fasi generali di un guasto all’avvolgimento tra conduttori sono le seguenti:
– Fase 1: l’isolamento tra i conduttori viene sollecitato, causando una variazione dei valori resistivi e capacitivi dell’isolamento nel punto di guasto. Temperature elevate e guasti reattivi simili provocano la carbonizzazione dell’isolamento (dielettrico) in quel punto. La carbonizzazione può anche verificarsi a causa della tracciabilità del sistema di isolamento.
– Fase 2: il punto di guasto diventa più resistivo. Si verifica un’induttanza reciproca tra la parte “buona” dell’avvolgimento (e gli altri componenti del sistema che trasportano corrente) e le spire di cortocircuito. Le perdite I2 R aumentano nel punto del guasto a causa dell’aumento della corrente all’interno delle spire di cortocircuito, aumentando la temperatura in quel punto e causando una rapida carbonizzazione del sistema di isolamento. A questo punto il motore potrebbe iniziare a intervenire, anche se potrebbe essere in grado di funzionare dopo un breve periodo di raffreddamento.
– Fase 3: l’isolamento si rompe e l’energia all’interno del punto di cortocircuito può causare una rottura esplosiva del sistema di isolamento e la vaporizzazione degli avvolgimenti.
4.5 Confronto tra le apparecchiature
I macchinari rotanti e i trasformatori funzionano secondo principi simili. Ad esempio, un motore a induzione trifase ha un circuito primario (avvolgimento statorico) e secondario (avvolgimento del rotore), proprio come gli avvolgimenti primari e secondari di un trasformatore. La differenza è che l’energia elettrica viene trasformata in un valore diverso di energia elettrica, grazie ai trasformatori. La stessa energia elettrica viene convertita in energia meccanica da un motore elettrico.
Gli avvolgimenti dei trasformatori sono progettati in modo da essere generalmente bilanciati tra le fasi. In questo modo si ottiene un’energia bilanciata sul secondario e impedenze di circuito bilanciate in tutto il sistema. Le macchine rotanti trifase (assemblate) presentano un’induttanza reciproca variabile al variare della posizione del rotore. Il risultato può essere uno sbilanciamento induttivo testato e un conseguente sbilanciamento dell’impedenza, con il rotore situato in una posizione mentre vengono testate tutte e tre le fasi. Gli squilibri degli avvolgimenti delle macchine rotanti possono essere valutati compensando la posizione del rotore o confrontando le letture di impedenza e induttanza.
4.6 Misure di prova per la valutazione
Le misure elettriche di base per la valutazione degli avvolgimenti dei trasformatori e delle macchine rotanti comprendono:
a) Resistenza (IEEE Std 118-1978, IEEE Std 389-1996) ñ Utilizzata per rilevare variazioni nelle dimensioni dei fili, nei collegamenti e nei circuiti aperti/ad alta resistenza.
b) Induttanza (IEEE Std 388-1992: Sezione 5.2 Sbilanciamento dell’induttanza (impedenza), 5.6.1 Metodo di misura del ponte di induttanza, IEEE Std 120-1989) ñ L’induttanza è una funzione della geometria e della permeabilità. È indipendente da tensione, corrente e frequenza. L’induttanza complessiva misurata è una combinazione delle induttanze reciproche e interne del circuito, nota come induttanza del circuito. Il rilevamento dei guasti è possibile nei cortocircuiti degli avvolgimenti solo quando le capacità dei sistemi di isolamento dielettrico diventano resistive e si verifica un cortocircuito, con conseguente induttanza reciproca tra la parte “buona” della bobina e le spire in cortocircuito. L’induttanza reciproca viene utilizzata anche nella valutazione degli avvolgimenti del rotore nelle macchine rotanti.
c) Capacità (IEEE Std 389-1996, IEEE Std 120-1989) ñ Utilizzata per misurare la capacità complessiva del circuito e la capacità di isolamento della parete di terra. Normalmente l’andamento nel tempo.
d) Impedenza (IEEE Std 388-1992: Sezione 5.2 Sbilanciamento dell’induttanza (impedenza), IEEE Std 389-1996: Sezione 8.3 Sbilanciamento dell’impedenza, 8.4 Prove di bilanciamento, IEEE Std 120-1989: Sezione 5 Misure di impedenza) ñ L’impedenza dipende dalla frequenza, dalla resistenza, dall’induttanza e dalla capacità. La resistenza ha un impatto relativamente piccolo sull’impedenza complessiva e la frequenza applicata influisce sulle componenti induttive e capacitive della reattanza. L’aumento dell’induttanza ha un effetto additivo sui valori di impedenza, mentre la capacità ha un impatto inverso sull’impedenza del circuito. Ad esempio, un aumento dell’induttanza complessiva del circuito genererà un aumento approssimativamente parallelo dell’impedenza, mentre un aumento della capacità complessiva del circuito causerà una diminuzione dell’impedenza.
e) Angolo di fase (IEEE Std 120-1989) ñ L’angolo di fase del circuito è una misura del tempo di ritardo tra tensione e corrente presentata come gradi di separazione. È direttamente influenzato dall’impedenza del circuito, dalla tensione e dalla frequenza applicate.
f) Test di risposta in frequenza (IEEE Std 389-1996: Sezione 11.1 Risposta in frequenza del trasformatore) ñ I test di risposta in frequenza possono essere valutati con diversi metodi. Ai fini della presente linea guida, la valutazione sarà presentata come la riduzione percentuale della corrente di una bobina quando la frequenza viene raddoppiata, nota anche come test di risposta corrente/frequenza. Le risposte di corrente/frequenza sono influenzate dalle variazioni delle capacità del circuito all’aumentare della frequenza.
g) Prove di resistenza all’isolamento ñ Coperte da IEEE Std 43-2000.
Indipendentemente dalle misure fornite, lo scopo principale è quello di identificare gli squilibri tra bobine simili, ad esempio tra le fasi di una macchina rotante trifase o di un trasformatore trifase.
5.0 Valutazione delle apparecchiature
5.1 Valutazione dei trasformatori trifase
Quando si eseguono test su trasformatori trifase utilizzando tecniche di analisi degli avvolgimenti, il circuito opposto al lato da testare deve essere cortocircuitato e messo a terra (IEEE Std 388- 1992: Sezione 5.6.1 Metodo di misura a ponte di induzione, IEEE Std 389-1996). Ciascuna delle tre fasi viene misurata e valutata per verificarne l’equilibrio. Vedere la Tabella 1 per i limiti di risultato raccomandati.
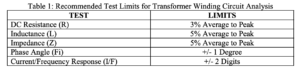
a) I test Fi e I/F rileveranno la rottura dell’isolamento, ovvero le modifiche alle capacità e alle resistenze del circuito del sistema di isolamento.
b) Le misurazioni dell’induttanza e dell’impedenza rileveranno i guasti avanzati degli avvolgimenti e i difetti di rotazione durante la produzione o la riparazione.
c) La resistenza viene utilizzata per rilevare connessioni allentate, conduttori interrotti e problemi correlati.
5.2 Valutazione delle macchine rotanti a induzione trifase
Lo statore e il rotore vengono valutati separatamente utilizzando tecniche di analisi dei circuiti di avvolgimento. Le seguenti linee guida coprono entrambi i casi.
5.2.1 Prova del rotore del motore assemblato
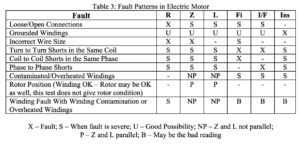
I tipi di guasti comuni ai rotori dei motori elettrici sono:
a) Traferro (eccentricità del rotore): Di norma non è un guasto progressivo, a meno che non vi sia un allentamento del rotore o un guasto grave all’albero del motore o ai cuscinetti. I problemi di allentamento, cuscinetti e alberi del motore possono essere individuati più rapidamente e in modo più sicuro grazie alle tecniche di analisi delle vibrazioni. I problemi di traferro in fase di produzione e di riparazione possono essere rilevati con l’analisi del circuito statico dell’avvolgimento durante il test di accettazione o presso il produttore/riparatore prima del tempo perso per l’installazione dell’apparecchiatura. Questo tipo di test di accettazione viene utilizzato per determinare se il traferro è stato regolato correttamente (+/- 10% della lettura media del traferro rilevata ad entrambe le estremità del rotore durante l’installazione).4
b) Vuoti di fusione e connessioni delle barre del rotore: Che con il tempo possono trasformarsi in guasti alla barra del rotore. Nei rotori in alluminio fuso ci sono sempre dei vuoti di fusione, variazioni nella lega di alluminio e variazioni nelle giunzioni delle barre in lega di rame che influiscono sull’induttanza. I guasti possono essere rilevati effettuando una serie di letture dell’induttanza o dell’impedenza del circuito mentre l’albero viene ruotato di 360 gradi. Queste letture possono essere graficate come una forma d’onda e analizzate per individuare eventuali guasti osservando la posizione delle variazioni di induttanza e/o impedenza della forma d’onda. Una piccola variazione sull’inclinazione o sulla pendenza della forma d’onda indica un piccolo difetto, di solito non intrusivo, mentre una variazione significativa sul picco della forma d’onda indica difetti gravi del rotore. I guasti gravi possono interferire con le caratteristiche di funzionamento del motore.
c) Rottura delle barre del rotore: sono guasti progressivi che normalmente si verificano a causa di un funzionamento errato del motore elettrico. Quando un motore elettrico viene avviato, il calore si accumula nel rotore a causa delle correnti elevate e dell’alta frequenza, richiedendo un periodo di raffreddamento. In altri casi, un rotore può essere in stallo, causando correnti elevate e frequenze elevate del rotore. Il tasso di espansione delle leghe di rame (o di alluminio) e i materiali del rotore sono diversi, con conseguenti sollecitazioni meccaniche sulle barre stesse. In caso di sollecitazioni estreme, le barre del rotore possono incrinarsi, riducendo la capacità del motore di produrre coppia. Quando le barre del rotore si rompono, le barre del rotore circostanti sono attraversate da una corrente aggiuntiva, che provoca un ulteriore aumento della temperatura delle barre del rotore e la possibilità che si verifichino ulteriori cricche.
La capacità delle apparecchiature di prova di rilevare i guasti attraverso l’induttanza e l’impedenza è dovuta alle variazioni dell’induttanza reciproca del circuito al variare della posizione del rotore. Poiché un motore elettrico è un trasformatore con un circuito secondario rotante, quando la posizione del rotore cambia, il rapporto effettivo tra primario (avvolgimenti di statore) e secondario (avvolgimenti di rotore) cambia e l’induttanza reciproca complessiva e la conseguente impedenza del circuito cambiano. A causa della natura delle apparecchiature rotanti, le variazioni nel tempo saranno sinusoidali (o con qualche variazione) e simmetriche.
Il processo generale per l’esecuzione di un test di induttanza o di impedenza del rotore consiste nell’effettuare letture di induttanza o impedenza con incrementi uniformi per 360 gradi di rotazione, oppure utilizzando un test basato sull’induttanza o sull’impedenza in tempo reale. I risultati del test devono essere graficati per essere interpretati.
5.2.2 Test sullo statore delle apparecchiature rotanti assemblate
La valutazione dei risultati dei test sulle apparecchiature rotanti assemblate fornirà diversi gradi di accuratezza nel rilevamento dei guasti. Ad esempio, i risultati delle prove di induttanza forniranno valori elevati e variabili quando il rotore viene collocato in posizioni diverse, per cui la posizione del rotore deve essere regolata in modo che i valori dell’induttanza reciproca tra gli avvolgimenti primari (statore) e secondari (rotore) siano relativamente uguali. Tuttavia, l’induttanza accoppiata all’impedenza mostra l’impatto capacitivo della rottura dell’isolamento o della contaminazione dell’avvolgimento. Ad esempio, se l’impedenza e l’induttanza sono relativamente parallele, lo squilibrio di fase sarebbe dovuto alla posizione del rotore. Se si verifica una riduzione dell’impedenza di almeno una fase o se l’impedenza e l’induttanza non sono relativamente parallele, la capacità del circuito è cambiata, indicando una possibile contaminazione dell’avvolgimento o una rottura dell’isolamento.
I guasti precoci vengono rilevati come variazioni dell’angolo di fase o della risposta di corrente/frequenza, come uno ëspostamento delle letture. Uno spostamento può essere indicato, per esempio, come Fi: 77/76/77 e/o I/F: -44/-46/- 44.
5 Le letture della resistenza e dello squilibrio di impedenza possono essere conteggiate solo se si tiene conto della posizione del rotore. Le letture devono essere eseguite in corrispondenza di un picco o di una valle dell’onda sinusoidale derivante dalla variazione della posizione del rotore.
6.0 Bibliografia
a) IEEE Std 43-2000: IEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery (Pratica raccomandata per testare la resistenza di isolamento delle macchine rotanti).
b) IEEE Std 56-1977: Guida IEEE per la manutenzione dell’isolamento di grandi macchine rotanti a corrente alternata (10.000 kVA e oltre).
c) IEEE Std 118-1978: Codice di prova standard IEEE per le misure di resistenza
d) IEEE Std 120-1989: IEEE Master Test Guide for Electrical Measurements in Power Circuits (Guida alle prove elettriche nei circuiti di potenza)
e) IEEE Std 388-1992: Standard IEEE per trasformatori e induttori in apparecchiature elettroniche di conversione di potenza
f) IEEE Std 389-1996: IEEE Recommended Practice for Testing Electronics Transformers and Inductors (Pratica raccomandata per il collaudo di trasformatori e induttori elettronici).
g) IEEE Std 1068-1990: IEEE Recommended Practice for the Repair and Rewinding of Motors for the Petroleum and Chemical Industries.
h) Penrose, Dr. Howard W., Motor Circuit Analysis: Theory, Application, and Energy Analysis, SUCCESS by DESIGN, 2001.
i) Fink, Donald and Beaty, H. Wayne, Standard Handbook for Electrical Engineers, Fourteenth Edition, McGraw-Hill, 2000.
j) Sarma, Mulukutl, Electrical Machines: Steady-State Theory and Dynamic Performance, Second Edition, PWS Publishing Company, 1996.
k) Mazur, Glen and Proctor, Thomas, Troubleshooting Electric Motors, Second Edition, ATP Publishing, 1997.
l) Nasar, Syed, Electrical Machines and Electromagnetics, McGraw-Hill, 1981

AT34
Analizzare e monitorare l’integrità dei componenti del motore per individuare guasti a terra, guasti agli avvolgimenti interni, connessioni aperte e contaminazione, il tutto con un unico dispositivo portatile.

Seminario online di diagnostica motoristica di livello mondiale – Livello 1 – 12-16 giugno
Avete sentito? Dal 12 al 16 giugno si terrà il seminario di diagnostica motoristica di livello 1 della World Class. Si tratta di un seminario online/virtuale che inizierà ogni giorno […]

Preconlub 15-16 giugno 2023 Leon, Messico
Unitevi alla responsabile regionale LATAM di ATP, Gloria Urizar, che presenterà al Preconlub 2023! Maggiori dettagli: https://www.preconlub.com/ Gloria Urizar Responsabile regionale – America […]