Hướng dẫn kiểm tra máy quay
1. Khái quát chung
1.1 Phạm vi
Tài liệu này mô tả hướng dẫn đánh giá phần ứng và cuộn dây kích từ của thiết bị quay, có công suất định mức từ 1 mã lực (746 Watt) trở lên, đối với quần short cuộn dây, bộ mất cân bằng pha và thanh rôto. Nó áp dụng cho máy cảm ứng và máy biến áp.
Tài liệu này mô tả các phép đo phân tích mạch cuộn dây tĩnh điển hình và cách các phép đo này chỉ ra tình trạng máy. Nó cung cấp hướng dẫn về các giới hạn cho phép đo mạch.
Các loại phép đo được xem xét được cung cấp bởi các thiết bị riêng lẻ hoặc tập hợp các thiết bị đo cung cấp các phép đo mạch cuộn dây cơ bản như điện trở, trở kháng, điện cảm, điện dung và các phép đo kiểm tra chuyên dụng. Người ta thừa nhận rằng các kỹ thuật đo lường phải bao gồm (Tham khảo: IEEE Std 120-1989):
a) Phép đo điện trở dòng điện một chiều phải sử dụng giá trị dòng điện một chiều.
b) Các phép đo dòng điện xoay chiều, chẳng hạn như độ tự cảm và trở kháng, phải là dòng điện xoay chiều sử dụng các phép đo sóng hình sin do nhà sản xuất thiết bị lựa chọn.
c) Tất cả các phép đo phải được đánh giá thông qua các mạch cầu nối và được báo cáo trong giới hạn của các cầu nối đó. Các đơn vị đo lường kỹ thuật tiêu chuẩn không được tính toán, chẳng hạn như độ tự cảm và trở kháng, trừ khi các giá trị được trình bày dưới dạng tỷ lệ, độ hoặc tỷ lệ phần trăm.
Tại thời điểm soạn thảo hướng dẫn này, điện áp đầu ra, để cung cấp kết quả thử nghiệm trong tất cả các phép đo cách điện của tường đất, nằm trong phạm vi điện tử và thường ở mức dưới 10 Vôn AC/DC. Tần số đầu ra tiêu chuẩn của các nhạc cụ này thường nằm trong khoảng trên 100 Hz. Nếu thiết bị đo được phát triển bằng cách sử dụng các nguyên tắc kỹ thuật phù hợp vượt quá các giá trị này hoặc nếu các giá trị bổ sung được cung cấp mang lại cái nhìn chính xác về mạch động cơ thì chúng có thể nằm trong phạm vi của hướng dẫn này.
1.2 Mục đích
Mục đích của hướng dẫn này là phác thảo các phương pháp và dữ liệu chung được thu thập bằng cách sử dụng phân tích mạch cuộn dây và đưa ra hướng dẫn trong việc diễn giải các kết quả đối với cả cách điện giữa các vòng dây, cách điện tường đất và đánh giá rôto lồng sóc. Các phương pháp đo cách điện của tường đất và kết quả thử nghiệm phải tham khảo bản sửa đổi hiện tại của Tiêu chuẩn IEEE 43, “Thực hành được khuyến nghị của IEEE để kiểm tra điện trở cách điện của máy quay”.
a) Đề xuất sự kết hợp thống nhất các kết quả thử nghiệm có thể sử dụng để đánh giá tình trạng của máy quay và máy biến áp.
b) Đưa ra hướng dẫn chung về phương pháp đọc các phép đo mạch rôto cảm ứng và giải thích kết quả.
c) Xác định các loại phép đo được sử dụng để xác định loại cách điện giữa các vòng, cách điện trên tường đất và các sự cố máy quay khác.
2. Tài liệu tham khảo
Sau đây là các tài liệu tham khảo liên quan đến tiêu chuẩn này.
a) IEEE Std 43-2000: Thực hành được IEEE khuyến nghị để kiểm tra điện trở cách điện của máy quay
b) IEEE Std 56-1977: Hướng dẫn của IEEE về bảo trì cách điện cho máy điện xoay chiều cỡ lớn (10.000 kVA và lớn hơn)
c) IEEE Std 118 – 1978: Mã kiểm tra tiêu chuẩn IEEE cho phép đo điện trở
d) IEEE Std 120-1989: Hướng dẫn kiểm tra tổng thể của IEEE về phép đo điện trong mạch điện
e) IEEE Std 388 – 1992: Tiêu chuẩn IEEE cho máy biến áp và cuộn cảm trong thiết bị chuyển đổi nguồn điện tử
f) IEEE Std 389 – 1996: Thực hành được khuyến nghị của IEEE để thử nghiệm máy biến áp và cuộn cảm điện tử
g) IEEE Std 1068 – 1990: Thực hành được khuyến nghị của IEEE cho việc sửa chữa và quấn lại động cơ cho ngành dầu khí và hóa chất
3. Cân nhắc về an toàn
Thuật ngữ ‘phân tích mạch điện cuộn dây tĩnh’ được định nghĩa là phương pháp thử nghiệm được thực hiện trên thiết bị đã ngắt điện. Các thiết bị được sử dụng phải tuân theo một số chứng nhận được công nhận như UL, CE, CSA hoặc tương đương. Không thể bao gồm tất cả các khía cạnh an toàn trong hướng dẫn này. Nhân viên kiểm tra nên tham khảo hướng dẫn sử dụng của nhà sản xuất, các quy định của công đoàn, công ty và chính phủ.
4. Lý thuyết chung về phân tích mạch cuộn dây
4.1 MẠCH TỪ CHUYÊN
Cuộn dây điện và máy điện được tạo thành từ sự kết hợp của các mạch điện từ ghép nối. Các mạch từ được phát triển là kết quả của dòng điện đi qua dây dẫn và được dẫn hướng qua vật liệu từ tính.
Đầu tiên, xét một dây dẫn có chiều dài l được đặt vuông góc với các cực của nam châm khi mang dòng điện I. Kết quả là một lực ở mức F, trong đó B là độ lớn của mật độ từ thông (tính bằng Tesla, hoặc T) và từ thông là thước đo cường độ từ trường. Công thức kết quả được tìm thấy là:
Công thức 1: Lực (Newton)
F = BI l
Dựa vào vị trí tùy ý của dây dẫn với l là vectơ có độ lớn l theo phương của dòng điện.
Công thức 2: Lực với vị trí dây dẫn tùy ý
F = Il x B
Giả sử B có độ lớn không đổi với diện tích A:
Công thức 3: Từ thông (Φ, Webber)
Φ = BA hoặc B = Φ/A
B được biểu thị bằng Webber(Wb)/m
Mối quan hệ giữa I và B như sau:
Công thức 4: Định luật mạch Ampe
A/m *d*l = tôi
Trong đó A/m là cường độ từ trường H
Khi một mạch kín được dòng điện chạy qua N lần, chẳng hạn như trong một cuộn dây, thì lực từ sinh ra (mm hoặc ℑ) sẽ như sau:
Công thức 5: MMF
ℑ = NI
NI còn được gọi là vòng Ampe (At). Một N của một sẽ được gọi là một ëturn.í
Độ tự cảm (L) được định nghĩa là liên kết từ thông trên một đơn vị dòng điện được biểu thị bằng đơn vị Henry (H).1
Công thức 6: Độ tự cảm
L = (NΦ)/I
Đối với vết thương hình xuyến có cuộn dây ëní riêng biệt, độ tự cảm có thể được xác định:
Công thức 7: Trường hình xuyến1
Lpq = (Np(kpqΦq))/iq
Năng lượng tích trữ trong một cuộn cảm có thể được tính khi mang theo dòng điện (i):
Công thức 8: Năng lượng cảm ứng
W = (1/2)Li 2
Tần số tác động đến các trường bên trong dây dẫn. Khi tần số áp dụng tăng lên, dòng điện và trường thu được sẽ di chuyển đến gần bề mặt của dây dẫn hơn (hiệu ứng bề mặt). Điều này là do có sự xuất hiện của suất điện động cảm ứng trong một dây dẫn có từ thông xen kẽ. Các suất điện động này ở tâm lớn hơn ở chu vi, do đó hiệu điện thế có xu hướng hình thành dòng điện ngược chiều với dòng điện ở tâm và hỗ trợ dòng điện ở chu vi. Do đó, dòng điện bị đẩy ra bên ngoài dây dẫn, làm giảm diện tích hiệu dụng của dây dẫn.î2
1 Máy điện và cơ điện, Syed A Nasar, Schaumís Outline Series, 1981
2 Sổ tay tiêu chuẩn dành cho kỹ sư điện, tái bản lần thứ 14, Donald G Fink, Wayne Beaty, McGraw Hill, 2000.
4.2 HỆ THỐNG CÁCH NHIỆT
“Cách điện là một môi trường hoặc vật liệu mà khi đặt giữa các dây dẫn có điện thế khác nhau chỉ cho phép một dòng điện không đáng kể cùng pha với điện áp đặt vào chạy qua nó. Thuật ngữ điện môi gần như đồng nghĩa với cách điện, có thể được coi là chất điện môi được áp dụng. Một chất điện môi hoàn hảo không có dòng điện dẫn và chỉ có dòng điện tích điện dung giữa các dây dẫn. “2 (Xem thêm IEEE Std 120-1989, Phần 5.4.2)
Biểu diễn mạch đơn giản nhất của chất điện môi là điện trở và tụ điện song song. Điện dung giữa các dây dẫn (trong chân không) là 0,0884 x 10-12 A/t trong đó A là diện tích của dây dẫn tính bằng cm vuông và t là khoảng cách giữa các dây dẫn tính bằng cm. “Khi vật liệu điện môi lấp đầy khoảng trống giữa các điện cực, điện dung sẽ cao hơn nhờ các điện tích bên trong các phân tử và nguyên tử của vật liệu, chúng thu hút nhiều điện tích hơn đến các mặt phẳng tụ điện đối với cùng một điện áp đặt vào. Điện dung với chất điện môi giữa các điện cực là: “3
Công thức 9: Điện dung giữa các dây dẫn tròn song song
C = (2π∈í∈oL)/cosh-1(D/2r)
Độ thấm của hệ thống cách điện giảm xuống (vùng phân tán) khi tăng tần số áp dụng, cũng như sự phân cực giao diện ion và sự phân cực lưỡng cực phân tử. Trong polyme, sự phân tán lưỡng cực xảy ra ở tần số rất thấp.
4.3 HỎI CÁCH ĐIỆN
Sự cố cách điện, được gọi là lỗi trong hướng dẫn này, bao gồm nhiễm bẩn, theo dõi hồ quang, lão hóa nhiệt và lỗi cơ học. Mỗi loại sự cố đều có một yếu tố chung: Đặc tính điện trở và điện dung của cách điện thay đổi.
Sự ô nhiễm, đặc biệt là sự xâm nhập của nước, làm tăng độ dẫn điện của vật liệu cách nhiệt. Nước có xu hướng tích tụ trong các vết nứt và tạp chất cách nhiệt trong hệ thống cách nhiệt. Điện trường gây ra những thay đổi đối với chất gây ô nhiễm, bao gồm cả sự giãn nở, làm hỏng thêm hệ thống cách điện. Các chất gây ô nhiễm khác, bao gồm khí, hơi, bụi, v.v., có thể tấn công thành phần hóa học của hệ thống cách nhiệt. Một khi hệ thống cách nhiệt được bắc cầu hoàn toàn thì hệ thống đó được coi là bị chập mạch. Điều này thường xảy ra đầu tiên giữa các dây dẫn, nơi hệ thống cách điện yếu nhất. Các vùng lỗi chính bao gồm phần không được bảo đảm của cuộn dây, chẳng hạn như các đầu cuối của máy quay (cũng là điểm ứng suất điện cao nhất của cuộn dây) và điểm ứng suất cơ học cao nhất, chẳng hạn như điểm cuộn dây. để lại các khe trên máy quay.
Vết hồ quang của hệ thống cách điện xảy ra khi dòng điện cao đi qua giữa các dây dẫn trên bề mặt của hệ thống cách điện. Chất cách điện ở những điểm đó bị cacbon hóa, làm thay đổi các thành phần điện dung và điện trở của hệ thống cách điện. Vết hồ quang thường là kết quả của: Ứng suất điện mạnh; Sự ô nhiễm; hoặc cả hai. Loại lỗi này chủ yếu xảy ra giữa các dây dẫn hoặc cuộn dây và thường kết thúc bằng một đoạn ngắn.
Lão hóa nhiệt của hệ thống cách điện xảy ra khi hệ thống cách điện xuống cấp do Phương trình hóa học Arrhenius. Nguyên tắc chung được chấp nhận rộng rãi là tuổi thọ nhiệt của hệ thống cách nhiệt giảm một nửa khi nhiệt độ vận hành tăng lên 10°C. Lớp cách nhiệt sẽ nhanh chóng xuống cấp và cacbon hóa khi đạt đến giới hạn nhiệt độ cho hệ thống cách nhiệt.
Các yếu tố môi trường khác cũng ảnh hưởng đến tuổi thọ nhiệt của hệ thống cách nhiệt bao gồm: Ô nhiễm cuộn dây; Độ ẩm; Điện phân; và, Các ứng suất điện khác.
Các lỗi cơ học trong hệ thống cách điện bao gồm nứt do ứng suất, rung, xâm nhập cơ học và các lỗi cơ học. Các lực bên trong cuộn dây trong các hoạt động khác nhau sẽ gây ra chuyển động cơ học và có thể dẫn đến nứt vỡ vật liệu cách nhiệt. Rung động điện và cơ gây ra ứng suất quá mức lên hệ thống cách điện dẫn đến đứt gãy do ứng suất và làm lỏng hệ thống cách điện. Sự xâm nhập cơ học bao gồm sự di chuyển của vật liệu vào hệ thống cách điện giữa dây dẫn và/hoặc hệ thống cách điện với đất. Lỗi cơ học bao gồm các hư hỏng như lỗi ổ trục, trong máy quay, khiến ổ trục bị bung ra và đi qua các bộ phận chuyển động của hệ thống. Những lỗi này có thể kết thúc dưới dạng đoản mạch giữa dây dẫn, cuộn dây hoặc cuộn dây với đất.
4.4 Các giai đoạn hư hỏng cách điện của cuộn dây
Nguyên nhân chính gây ra hỏng cuộn dây bao gồm: Hỏng cách điện (nhiệt); Sự ô nhiễm; Độ ẩm xâm nhập; quá độ; và ứng suất cơ học, và trước hết dẫn đến đánh thủng cách điện giữa các dây dẫn trong cùng một cuộn dây, giữa các cuộn dây trong cùng một pha hoặc giữa các cuộn dây của các pha riêng biệt. Những đoạn ngắn cuộn dây này có thể, nhưng không phải lúc nào cũng xảy ra, dẫn đến lỗi điện trở cách điện khi cuộn dây thực sự bị hỏng. Việc phát hiện những thay đổi giữa các dây dẫn mang lại cơ hội sửa chữa sớm hoặc thay thế sớm hơn trước khi thiết bị ngừng hoạt động. Lưu ý rằng tỷ lệ sự cố sẽ phụ thuộc vào mức độ nghiêm trọng của sự cố (ví dụ: tỷ số vòng dây) và điện thế giữa các dây dẫn (ví dụ: sự cố có thể có xu hướng xảy ra ở thiết bị dưới 600 Vac và sẽ nhanh chóng hỏng trong các hệ thống trên 1000 Vac.
Các giai đoạn chung của sự cố cuộn dây giữa các dây dẫn như sau:
• Giai đoạn 1: Lớp cách điện giữa các dây dẫn bị căng, gây ra sự thay đổi giá trị điện trở và điện dung của lớp cách điện tại điểm sự cố. Nhiệt độ cao và các lỗi phản ứng tương tự dẫn đến hiện tượng cacbon hóa lớp cách điện (điện môi) tại điểm đó. Quá trình cacbon hóa cũng có thể xảy ra do vết bám trên hệ thống cách nhiệt.
• Giai đoạn 2: Điểm đứt gãy trở nên có điện trở lớn hơn. Hiện tượng tự cảm lẫn nhau xảy ra giữa phần ëgoodí của cuộn dây (và các bộ phận mang dòng điện khác của hệ thống) và các vòng dây ngắn mạch. Tổn thất I2 R tăng tại điểm sự cố do dòng điện tăng trong các vòng ngắn mạch, làm tăng nhiệt độ tại điểm đó và khiến hệ thống cách điện nhanh chóng bị cacbon hóa. Động cơ có thể bắt đầu vấp vào thời điểm này, mặc dù nó có thể chạy sau một thời gian làm mát ngắn.
• Giai đoạn 3: Lớp cách điện bị đứt và năng lượng trong điểm ngắn mạch có thể gây nổ, đứt hệ thống cách điện và làm cuộn dây bốc hơi.
4.5 So sánh thiết bị
Máy quay và máy biến thế hoạt động theo nguyên tắc tương tự. Ví dụ, động cơ cảm ứng ba pha có mạch sơ cấp (cuộn dây stato) và mạch thứ cấp (cuộn dây rôto) giống như cuộn dây sơ cấp và thứ cấp của máy biến áp. Sự khác biệt là năng lượng điện được chuyển đổi thành một giá trị năng lượng điện khác bằng máy biến áp. Năng lượng điện tương tự được chuyển đổi thành năng lượng cơ học bằng động cơ điện.
Cuộn dây máy biến áp được thiết kế sao cho chúng thường được cân bằng giữa các pha. Điều này cho phép cân bằng năng lượng trên các trở kháng mạch thứ cấp và cân bằng trong toàn hệ thống. Máy điện quay ba pha (đã lắp ráp) có độ tự cảm lẫn nhau thay đổi khi vị trí rôto thay đổi. Kết quả có thể là mất cân bằng cảm ứng đã được thử nghiệm và dẫn đến mất cân bằng trở kháng, với rôto được đặt ở một vị trí trong khi cả ba pha đều được thử nghiệm. Sự mất cân bằng của cuộn dây máy quay có thể được đánh giá bằng cách bù cho vị trí rôto hoặc bằng cách so sánh số đọc của trở kháng và điện cảm.
4.6 Đo kiểm tra để đánh giá
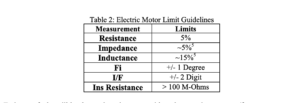
Các phép đo điện cơ bản để đánh giá cuộn dây máy biến áp và máy quay bao gồm:
a) Điện trở (IEEE Std 118-1978, IEEE Std 389-1996) ñ Được sử dụng để phát hiện các thay đổi về kích thước dây, kết nối và mạch hở/điện trở cao.
b) Độ tự cảm (IEEE Std 388-1992: Mục 5.2 Độ tự cảm (Trở kháng) Mất cân bằng, 5.6.1 Phương pháp đo cầu điện cảm, IEEE Std 120-1989) ñ Độ tự cảm là một hàm của hình học và độ thấm. Nó độc lập với điện áp, dòng điện và tần số. Độ tự cảm tổng thể được đo là sự kết hợp giữa độ tự cảm lẫn nhau và độ tự cảm bên trong của mạch, được gọi là độ tự cảm của mạch. Chỉ có thể phát hiện sự cố ở các cuộn dây ngắn mạch khi điện dung của hệ thống cách điện trở thành điện trở và tồn tại đoản mạch, dẫn đến hiện tượng tự cảm lẫn nhau giữa phần “tốt” của cuộn dây và các vòng dây bị chập. Độ tự cảm lẫn nhau cũng được sử dụng để đánh giá cuộn dây rôto trong máy điện quay.
c) Điện dung (IEEE Std 389-1996, IEEE Std 120-1989) ñ Dùng để đo điện dung tổng thể của mạch và điện dung cách điện của tường đất. Thường có xu hướng theo thời gian.
d) Trở kháng (IEEE Std 388-1992: Mất cân bằng điện cảm (Trở kháng) Mục 5.2, IEEE Std 389-1996: Mất cân bằng trở kháng Mục 8.3, Kiểm tra cân bằng 8.4, IEEE Std 120-1989: Đo lường trở kháng mục 5) Trở kháng là tần số, điện trở , độ tự cảm và điện dung phụ thuộc. Điện trở có tác động tương đối nhỏ đến trở kháng tổng thể và tần số áp dụng tác động đến các thành phần điện cảm và điện dung. Sự tăng độ tự cảm có tác động cộng thêm vào các giá trị trở kháng trong khi điện dung có tác động nghịch đảo đến trở kháng mạch. Ví dụ, việc tăng độ tự cảm tổng thể của mạch sẽ tạo ra sự tăng trở kháng gần như song song, việc tăng điện dung toàn mạch sẽ làm cho trở kháng giảm.
e) Góc pha (IEEE Std 120-1989) ñ Góc pha của mạch điện là phép đo thời gian trễ giữa điện áp và dòng điện được biểu thị dưới dạng mức độ phân tách. Nó bị ảnh hưởng trực tiếp bởi trở kháng mạch, điện áp và tần số được áp dụng.
f) Kiểm tra đáp ứng tần số (IEEE Std 389-1996: Phần 11.1 Đáp ứng tần số máy biến áp) – Kiểm tra đáp ứng tần số có thể được đánh giá bằng một số phương pháp. Vì mục đích của hướng dẫn này, việc đánh giá sẽ được trình bày dưới dạng phần trăm giảm dòng điện của cuộn dây khi tần số tăng gấp đôi, còn được gọi là thử nghiệm đáp ứng dòng điện/tần số. Đáp ứng dòng điện/tần số bị ảnh hưởng bởi sự thay đổi điện dung của mạch khi tần số tăng.
g) Kiểm tra điện trở cách điện – Được đề cập trong IEEE Std 43-2000.
Bất kể phép đo được cung cấp là gì, mục đích chính là xác định sự mất cân bằng giữa các cuộn dây giống nhau, chẳng hạn như giữa các pha trong máy quay ba pha hoặc máy biến áp ba pha.
5.0 Đánh giá thiết bị
5.1 Đánh giá máy biến áp ba pha
Trong khi thực hiện các thử nghiệm trên máy biến áp ba pha sử dụng kỹ thuật phân tích cuộn dây, mạch đối diện với phía đang được thử nghiệm phải được nối tắt và nối đất (IEEE Std 388-1992: Mục 5.6.1 Phương pháp đo cầu cảm ứng, IEEE Std 389-1996). Mỗi giai đoạn trong số ba giai đoạn đều được đo lường và đánh giá về sự cân bằng. Xem Bảng 1 để biết giới hạn kết quả thử nghiệm được đề xuất.
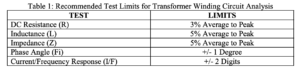
a) Các thử nghiệm Fi và I/F sẽ phát hiện sự đánh thủng cách điện – những thay đổi về điện dung và điện trở của mạch hệ thống cách điện.
b) Các phép đo điện cảm và trở kháng sẽ phát hiện các lỗi cuộn dây phức tạp và các khuyết tật quay trong quá trình sản xuất hoặc sửa chữa.
c) Điện trở dùng để phát hiện các kết nối lỏng lẻo, dây dẫn bị đứt và các vấn đề liên quan.
5.2 Đánh giá máy quay cảm ứng ba pha
Stator và rôto được đánh giá riêng biệt bằng kỹ thuật phân tích mạch điện cuộn dây. Các hướng dẫn sau đây sẽ bao gồm cả hai.
5.2.1 Thử nghiệm rôto động cơ đã lắp ráp
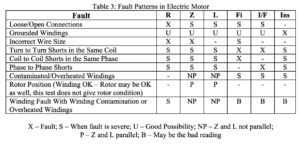
Các loại lỗi thường gặp ở rôto động cơ điện là:
a) Khe hở không khí (Độ lệch tâm của rôto): Thông thường không phải là hư hỏng tăng dần, trừ khi rôto bị lỏng hoặc lỗi trong trục động cơ hoặc ổ trục đã trở nên nghiêm trọng. Các vấn đề về độ lỏng, vòng bi và trục động cơ có thể được phát hiện nhanh hơn và an toàn hơn bằng cách sử dụng các kỹ thuật phân tích rung động. Các vấn đề về khe hở không khí trong quá trình sản xuất và sửa chữa có thể được phát hiện bằng phân tích mạch cuộn dây tĩnh trong quá trình kiểm tra nghiệm thu hoặc tại nhà sản xuất/cửa hàng sửa chữa trước khi mất thời gian lắp đặt thiết bị. Loại thử nghiệm chấp nhận này được sử dụng để xác định xem khe hở không khí có được đặt đúng hay không (+/- 10% số đọc khe hở không khí trung bình được lấy ở hai đầu rôto trong quá trình lắp đặt).4
b) Đúc các khoảng trống và các kết nối thanh rôto: Điều này có thể tiến triển thành các lỗi thanh rôto bị hỏng theo thời gian. Luôn có các khoảng trống đúc trong rôto nhôm đúc, các biến thể trong hợp kim nhôm và các biến thể trong khớp nối của các thanh hợp kim đồng sẽ ảnh hưởng đến điện cảm. Các lỗi có thể được phát hiện bằng cách thực hiện một loạt các số đo điện cảm hoặc trở kháng của mạch khi trục được quay 360 độ. Các số đọc này có thể được biểu thị dưới dạng dạng sóng và xem các lỗi bằng cách xem xét vị trí thay đổi điện cảm và/hoặc trở kháng của dạng sóng. Một thay đổi nhỏ về độ nghiêng hoặc độ dốc của dạng sóng cho thấy một khiếm khuyết nhỏ, thường không xâm lấn, trong khi một thay đổi đáng kể ở đỉnh của dạng sóng cho thấy lỗi rôto nghiêm trọng. Các lỗi nghiêm trọng có thể ảnh hưởng đến đặc tính vận hành của động cơ.
c) Gãy thanh rôto: Là những lỗi tiến triển thường xảy ra do động cơ điện hoạt động không đúng. Khi động cơ điện được khởi động, nhiệt tích tụ trong rôto do dòng điện cao và tần số cao, đòi hỏi phải có thời gian làm mát. Trong các trường hợp khác, rôto có thể bị chết máy, gây ra dòng điện cao và tần số rôto cao. Tốc độ giãn nở của hợp kim đồng (hoặc nhôm) và vật liệu rôto là khác nhau, gây ra ứng suất cơ học lên các thanh. Khi bị căng thẳng quá mức, các thanh rôto có thể bị nứt, làm giảm khả năng tạo ra mô-men xoắn của động cơ. Khi các thanh rôto bị gãy, các thanh rôto xung quanh mang thêm dòng điện, khiến nhiệt độ của thanh rôto tăng thêm và có khả năng xảy ra thêm các vết nứt.
Khả năng của thiết bị thử nghiệm trong việc phát hiện các sự cố thông qua độ tự cảm và trở kháng là do sự thay đổi độ tự cảm lẫn nhau của mạch điện khi vị trí rôto thay đổi. Vì động cơ điện là một máy biến áp có mạch thứ cấp quay, khi vị trí rôto thay đổi, tỷ số hiệu dụng sơ cấp (cuộn dây stato) thành thứ cấp (cuộn dây rôto) thay đổi và độ tự cảm lẫn nhau tổng thể và dẫn đến trở kháng mạch thay đổi. Do tính chất của thiết bị quay nên những thay đổi theo thời gian sẽ có dạng hình sin (hoặc một số biến thiên) và đối xứng.
Quy trình chung để thực hiện kiểm tra độ tự cảm hoặc trở kháng của rôto là lấy số đọc về độ tự cảm hoặc trở kháng theo các mức tăng đều khi quay 360 độ hoặc bằng cách sử dụng thử nghiệm dựa trên độ tự cảm hoặc trở kháng theo thời gian thực. Các kết quả kiểm tra nên được biểu đồ để giải thích.
5.2.2 Thử nghiệm Stator thiết bị quay lắp ráp
Việc đánh giá kết quả thử nghiệm thiết bị quay đã lắp ráp sẽ cung cấp mức độ chính xác phát hiện lỗi khác nhau. Ví dụ, kết quả kiểm tra độ tự cảm sẽ cung cấp các mức giá trị cao và khác nhau khi rôto được đặt ở các vị trí khác nhau, do đó vị trí rôto phải được điều chỉnh sao cho các giá trị độ tự cảm lẫn nhau giữa cuộn dây sơ cấp (stato) và thứ cấp (rotor) là tương đối giống nhau. Tuy nhiên, độ tự cảm kết hợp với trở kháng cho thấy tác động điện dung của sự đánh thủng cách điện hoặc sự nhiễm bẩn của cuộn dây. Ví dụ, nếu trở kháng và độ tự cảm tương đối song song thì sự mất cân bằng pha sẽ là do vị trí rôto. Nếu có sự giảm trở kháng ít nhất một pha, hoặc trở kháng và độ tự cảm không tương đối song song thì điện dung của mạch đã thay đổi cho thấy cuộn dây có thể bị nhiễm bẩn hoặc đánh thủng cách điện.
Các lỗi quay sớm sẽ được phát hiện dưới dạng thay đổi về góc pha hoặc đáp ứng dòng điện/tần số dưới dạng độ dịch chuyển trong số đọc. Một sự thay đổi có thể được biểu thị, ví dụ: Fi: 77/76/77 và/hoặc I/F: -44/-46/- 44.
5 Các số đọc mất cân bằng điện trở và trở kháng chỉ có thể được tính nếu tính đến vị trí rôto. Các số đọc phải được thực hiện ở đỉnh hoặc đáy của sóng hình sin khi thay đổi vị trí rôto.
6.0 Thư mục
a) IEEE Std 43-2000: Thực hành được IEEE khuyến nghị để kiểm tra điện trở cách điện của máy quay
b) IEEE Std 56-1977: Hướng dẫn của IEEE về bảo trì cách điện cho máy điện xoay chiều cỡ lớn (10.000 kVA và lớn hơn)
c) IEEE Std 118-1978: Mã kiểm tra tiêu chuẩn IEEE cho phép đo điện trở
d) IEEE Std 120-1989: Hướng dẫn kiểm tra tổng thể của IEEE về phép đo điện trong mạch điện
e) IEEE Std 388-1992: Tiêu chuẩn IEEE cho máy biến áp và cuộn cảm trong thiết bị chuyển đổi nguồn điện tử
f) IEEE Std 389-1996: Thực hành được khuyến nghị của IEEE để thử nghiệm máy biến áp và cuộn cảm điện tử
g) IEEE Std 1068-1990: Thực hành được khuyến nghị của IEEE cho việc sửa chữa và quấn lại động cơ cho ngành dầu khí và hóa chất
h) Penrose, Tiến sĩ Howard W., Phân tích mạch động cơ: Lý thuyết, ứng dụng và phân tích năng lượng, THÀNH CÔNG theo THIẾT KẾ, 2001
i) Fink, Donald và Beaty, H. Wayne, Sổ tay tiêu chuẩn dành cho kỹ sư điện, Ấn bản thứ mười bốn, McGraw-Hill, 2000.
j) Sarma, Mulukutl, Máy điện: Lý thuyết trạng thái ổn định và hiệu suất động, Tái bản lần thứ hai, Công ty xuất bản PWS, 1996
k) Mazur, Glen và Proctor, Thomas, Khắc phục sự cố Động cơ điện, Tái bản lần thứ hai, Nhà xuất bản ATP, 1997
l) Nasar, Syed, Máy điện và Điện từ, McGraw-Hill, 1981

AT34™
Phân tích và xu hướng tính toàn vẹn của thành phần động cơ đối với các lỗi nối đất, lỗi cuộn dây bên trong, kết nối hở và nhiễm bẩn – tất cả chỉ bằng một thiết bị cầm tay.

Hội thảo chẩn đoán động cơ đẳng cấp thế giới trực tuyến – Cấp độ 1 – 12-16 tháng 6
Bạn đã từng nghe? Chúng tôi sẽ tổ chức Hội thảo Chẩn đoán Động cơ Đẳng cấp Thế giới Cấp độ 1 vào ngày 12 đến 16 tháng Sáu . […]

Preconlub ngày 15-16 tháng 6 năm 2023 Leon, Mexico
Hãy tham gia cùng Giám đốc khu vực LATAM của ATP, Gloria Urizar, khi cô ấy giới thiệu tại Preconlub 2023! Thêm chi tiết: https://www.preconlub.com/ […]