ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨ ਟੈਸਟਿੰਗ ਦਿਸ਼ਾ-ਨਿਰਦੇਸ਼
1. ਸੰਖੇਪ ਜਾਣਕਾਰੀ
1.1 ਦਾਇਰਾ
ਇਹ ਦਸਤਾਵੇਜ਼ ਘੁੰਮਣ ਵਾਲੇ ਸਾਜ਼ੋ-ਸਾਮਾਨ ਆਰਮੇਚਰ ਅਤੇ ਫੀਲਡ ਵਿੰਡਿੰਗਜ਼ ਦਾ ਮੁਲਾਂਕਣ ਕਰਨ ਲਈ ਇੱਕ ਦਿਸ਼ਾ-ਨਿਰਦੇਸ਼ ਦਾ ਵਰਣਨ ਕਰਦਾ ਹੈ, ਜੋ ਕਿ 1 ਹਾਰਸ ਪਾਵਰ (746 ਵਾਟਸ) ਜਾਂ ਇਸ ਤੋਂ ਵੱਧ, ਵਿੰਡਿੰਗ ਸ਼ਾਰਟਸ, ਫੇਜ਼ ਅਸੰਤੁਲਨ ਅਤੇ ਰੋਟਰ ਬਾਰਾਂ ਲਈ ਰੇਟ ਕੀਤਾ ਗਿਆ ਹੈ। ਇਹ ਇੰਡਕਸ਼ਨ ਮਸ਼ੀਨਾਂ ਅਤੇ ਟ੍ਰਾਂਸਫਾਰਮਰਾਂ ‘ਤੇ ਲਾਗੂ ਹੁੰਦਾ ਹੈ।
ਦਸਤਾਵੇਜ਼ ਆਮ ਸਥਿਰ ਵਿੰਡਿੰਗ ਸਰਕਟ ਵਿਸ਼ਲੇਸ਼ਣ ਮਾਪਾਂ ਦਾ ਵਰਣਨ ਕਰਦਾ ਹੈ ਅਤੇ ਇਹ ਮਾਪ ਮਸ਼ੀਨ ਦੀ ਸਥਿਤੀ ਨੂੰ ਕਿਵੇਂ ਦਰਸਾਉਂਦਾ ਹੈ। ਇਹ ਸਰਕਟ ਮਾਪ ਲਈ ਸੀਮਾਵਾਂ ਲਈ ਦਿਸ਼ਾ-ਨਿਰਦੇਸ਼ ਪ੍ਰਦਾਨ ਕਰਦਾ ਹੈ।
ਸਮੀਖਿਆ ਕੀਤੇ ਗਏ ਮਾਪਾਂ ਦੀਆਂ ਕਿਸਮਾਂ ਵਿਅਕਤੀਗਤ ਜਾਂ ਸਾਧਨਾਂ ਦੇ ਸੰਗ੍ਰਹਿ ਦੁਆਰਾ ਪ੍ਰਦਾਨ ਕੀਤੀਆਂ ਜਾਂਦੀਆਂ ਹਨ ਜੋ ਮੁਢਲੇ ਵਿੰਡਿੰਗ ਸਰਕਟ ਮਾਪ ਪ੍ਰਦਾਨ ਕਰਦੇ ਹਨ ਜਿਵੇਂ ਕਿ ਪ੍ਰਤੀਰੋਧ, ਰੁਕਾਵਟ, ਇੰਡਕਟੈਂਸ, ਸਮਰੱਥਾ ਅਤੇ ਵਿਸ਼ੇਸ਼ ਟੈਸਟ ਮਾਪ। ਇਹ ਮਾਨਤਾ ਪ੍ਰਾਪਤ ਹੈ ਕਿ ਮਾਪ ਤਕਨੀਕਾਂ ਵਿੱਚ ਸ਼ਾਮਲ ਹੋਣਗੇ (ਹਵਾਲਾ: IEEE Std 120-1989):
a) ਪ੍ਰਤੱਖ ਵਰਤਮਾਨ ਪ੍ਰਤੀਰੋਧ ਮਾਪ ਸਿੱਧੇ ਮੌਜੂਦਾ ਮੁੱਲਾਂ ਦੀ ਵਰਤੋਂ ਕਰਨਗੇ।
b) ਬਦਲਵੇਂ ਮੌਜੂਦਾ ਮਾਪ, ਜਿਵੇਂ ਕਿ ਇੰਡਕਟੈਂਸ ਅਤੇ ਅੜਿੱਕਾ, ਸਾਧਨ ਨਿਰਮਾਤਾ ਦੁਆਰਾ ਚੁਣੇ ਗਏ ਸਾਈਨ-ਵੇਵ ਮਾਪਾਂ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹੋਏ ਬਦਲਵੇਂ ਕਰੰਟ ਹੋਣਗੇ।
c) ਸਾਰੇ ਮਾਪਾਂ ਦਾ ਮੁਲਾਂਕਣ ਬ੍ਰਿਜਡ ਸਰਕਟਾਂ ਦੁਆਰਾ ਕੀਤਾ ਜਾਣਾ ਹੈ ਅਤੇ ਅਜਿਹੇ ਪੁਲਾਂ ਦੀਆਂ ਸੀਮਾਵਾਂ ਦੇ ਅੰਦਰ ਰਿਪੋਰਟ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਮਾਪ ਦੀਆਂ ਮਿਆਰੀ ਇੰਜੀਨੀਅਰਿੰਗ ਇਕਾਈਆਂ ਦੀ ਗਣਨਾ ਨਹੀਂ ਕੀਤੀ ਜਾਣੀ ਹੈ, ਜਿਵੇਂ ਕਿ ਪ੍ਰੇਰਣਾ ਅਤੇ ਰੁਕਾਵਟ, ਸਿਵਾਏ ਜਿੱਥੇ ਮੁੱਲਾਂ ਨੂੰ ਅਨੁਪਾਤ, ਡਿਗਰੀ ਜਾਂ ਪ੍ਰਤੀਸ਼ਤ ਵਜੋਂ ਪੇਸ਼ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
ਇਸ ਦਿਸ਼ਾ-ਨਿਰਦੇਸ਼ ਦੇ ਸ਼ੁਰੂਆਤੀ ਡਰਾਫਟ ਦੇ ਸਮੇਂ, ਜ਼ਮੀਨੀ-ਕੰਧ ਦੇ ਇਨਸੂਲੇਸ਼ਨ ਮਾਪਾਂ ਨੂੰ ਛੱਡ ਕੇ ਬਾਕੀ ਸਾਰੇ ਵਿੱਚ ਟੈਸਟ ਨਤੀਜੇ ਪ੍ਰਦਾਨ ਕਰਨ ਲਈ ਆਉਟਪੁੱਟ ਵੋਲਟੇਜ, ਇਲੈਕਟ੍ਰਾਨਿਕ ਰੇਂਜ ਵਿੱਚ ਹਨ ਅਤੇ ਆਮ ਤੌਰ ‘ਤੇ 10 ਵੋਲਟ AC/DC ਦੇ ਅਧੀਨ ਪਾਏ ਜਾਂਦੇ ਹਨ। ਇਹਨਾਂ ਯੰਤਰਾਂ ਲਈ ਮਿਆਰੀ ਆਉਟਪੁੱਟ ਫ੍ਰੀਕੁਐਂਸੀ ਵੀ ਆਮ ਤੌਰ ‘ਤੇ 100 Hz ਤੋਂ ਉੱਪਰ ਹੁੰਦੀ ਹੈ। ਜੇਕਰ ਇੰਸਟ੍ਰੂਮੈਂਟੇਸ਼ਨ ਨੂੰ ਸਾਊਂਡ ਇੰਜਨੀਅਰਿੰਗ ਸਿਧਾਂਤਾਂ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਵਿਕਸਤ ਕੀਤਾ ਗਿਆ ਹੈ ਜੋ ਇਹਨਾਂ ਮੁੱਲਾਂ ਤੋਂ ਵੱਧ ਹਨ, ਜਾਂ ਜੇ ਵਾਧੂ ਮੁੱਲ ਪ੍ਰਦਾਨ ਕੀਤੇ ਗਏ ਹਨ ਜੋ ਮੋਟਰ ਸਰਕਟ ਦਾ ਸਹੀ ਦ੍ਰਿਸ਼ ਪ੍ਰਦਾਨ ਕਰਦੇ ਹਨ, ਤਾਂ ਉਹਨਾਂ ਨੂੰ ਇਸ ਦਿਸ਼ਾ-ਨਿਰਦੇਸ਼ ਦੇ ਦਾਇਰੇ ਵਿੱਚ ਸ਼ਾਮਲ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
1.2 ਉਦੇਸ਼
ਇਸ ਦਿਸ਼ਾ-ਨਿਰਦੇਸ਼ ਦਾ ਉਦੇਸ਼ ਵਿੰਡਿੰਗ ਸਰਕਟ ਵਿਸ਼ਲੇਸ਼ਣ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹੋਏ ਇਕੱਤਰ ਕੀਤੇ ਤਰੀਕਿਆਂ ਅਤੇ ਆਮ ਡੇਟਾ ਦੀ ਰੂਪਰੇਖਾ ਬਣਾਉਣਾ ਹੈ ਅਤੇ ਇੰਟਰ-ਟਰਨ ਇਨਸੂਲੇਸ਼ਨ, ਜ਼ਮੀਨੀ-ਦੀਵਾਰ ਇਨਸੂਲੇਸ਼ਨ ਅਤੇ ਸਕਵਾਇਰਲ-ਕੇਜ ਰੋਟਰਾਂ ਦੇ ਮੁਲਾਂਕਣ ਦੋਵਾਂ ਲਈ ਨਤੀਜਿਆਂ ਦੀ ਵਿਆਖਿਆ ਵਿੱਚ ਮਾਰਗਦਰਸ਼ਨ ਪ੍ਰਦਾਨ ਕਰਨਾ ਹੈ। ਜ਼ਮੀਨੀ-ਕੰਧ ਦੇ ਇਨਸੂਲੇਸ਼ਨ ਮਾਪਣ ਦੇ ਢੰਗ ਅਤੇ ਟੈਸਟ ਦੇ ਨਤੀਜੇ IEEE ਸਟੈਂਡਰਡ 43 ਦੇ ਮੌਜੂਦਾ ਸੰਸ਼ੋਧਨ ਦਾ ਹਵਾਲਾ ਦੇਣਗੇ, “ਆਈਈਈਈ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਰੀ ਦੇ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਤੀਰੋਧ ਦੀ ਜਾਂਚ ਲਈ IEEE ਸਿਫਾਰਸ਼ੀ ਅਭਿਆਸ”।
a) ਟੈਸਟ ਦੇ ਨਤੀਜਿਆਂ ਦੇ ਇਕਸਾਰ ਸੰਜੋਗਾਂ ਦੀ ਸਿਫ਼ਾਰਸ਼ ਕਰੋ ਜੋ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਰੀ ਅਤੇ ਟ੍ਰਾਂਸਫਾਰਮਰਾਂ ਦੀ ਸਥਿਤੀ ਦਾ ਮੁਲਾਂਕਣ ਕਰਨ ਲਈ ਵਰਤੇ ਜਾ ਸਕਦੇ ਹਨ।
b) ਇੰਡਕਸ਼ਨ ਰੋਟਰ ਸਰਕਟ ਮਾਪ ਅਤੇ ਨਤੀਜਿਆਂ ਦੀ ਵਿਆਖਿਆ ਲਈ ਰੀਡਿੰਗ ਦੀ ਵਿਧੀ ਲਈ ਆਮ ਦਿਸ਼ਾ-ਨਿਰਦੇਸ਼ ਪ੍ਰਦਾਨ ਕਰੋ।
c) ਇੰਟਰ-ਟਰਨ ਇਨਸੂਲੇਸ਼ਨ, ਜ਼ਮੀਨੀ-ਕੰਧ ਇਨਸੂਲੇਸ਼ਨ ਅਤੇ ਹੋਰ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਰੀ ਨੁਕਸ ਦੀਆਂ ਕਿਸਮਾਂ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰਨ ਲਈ ਵਰਤੇ ਜਾਂਦੇ ਮਾਪਾਂ ਦੀਆਂ ਕਿਸਮਾਂ ਨੂੰ ਪਰਿਭਾਸ਼ਿਤ ਕਰੋ।
2. ਹਵਾਲੇ
ਹੇਠਾਂ ਦਿੱਤੇ ਹਵਾਲੇ ਹਨ ਜੋ ਇਸ ਮਿਆਰ ਨਾਲ ਸਬੰਧਤ ਹਨ।
a) IEEE Std 43-2000: IEEE ਦੁਆਰਾ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਰੀ ਦੇ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਤੀਰੋਧ ਦੀ ਜਾਂਚ ਕਰਨ ਲਈ ਸਿਫ਼ਾਰਸ਼ੀ ਅਭਿਆਸ
b) IEEE Std 56-1977: ਵੱਡੀ ਅਲਟਰਨੇਟਿੰਗ ਕਰੰਟ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਰੀ (10,000 kVA ਅਤੇ ਵੱਡੀ) ਦੇ ਇਨਸੂਲੇਸ਼ਨ ਮੇਨਟੇਨੈਂਸ ਲਈ IEEE ਗਾਈਡ
c) IEEE Std 118 ñ 1978: ਵਿਰੋਧ ਮਾਪਾਂ ਲਈ IEEE ਸਟੈਂਡਰਡ ਟੈਸਟ ਕੋਡ
d) IEEE Std 120-1989: ਪਾਵਰ ਸਰਕਟਾਂ ਵਿੱਚ ਇਲੈਕਟ੍ਰੀਕਲ ਮਾਪਾਂ ਲਈ IEEE ਮਾਸਟਰ ਟੈਸਟ ਗਾਈਡ
e) IEEE Std 388 ñ 1992: ਇਲੈਕਟ੍ਰਾਨਿਕ ਪਾਵਰ ਪਰਿਵਰਤਨ ਉਪਕਰਣ ਵਿੱਚ ਟ੍ਰਾਂਸਫਾਰਮਰਾਂ ਅਤੇ ਇੰਡਕਟਰਾਂ ਲਈ IEEE ਸਟੈਂਡਰਡ
f) IEEE Std 389 ñ 1996: IEEE ਨੇ ਇਲੈਕਟ੍ਰਾਨਿਕਸ ਟ੍ਰਾਂਸਫਾਰਮਰਾਂ ਅਤੇ ਇੰਡਕਟਰਾਂ ਦੀ ਜਾਂਚ ਲਈ ਸਿਫ਼ਾਰਿਸ਼ ਕੀਤੀ ਅਭਿਆਸ
g) IEEE Std 1068 ñ 1990: IEEE ਦੁਆਰਾ ਪੈਟਰੋਲੀਅਮ ਅਤੇ ਰਸਾਇਣਕ ਉਦਯੋਗ ਲਈ ਮੋਟਰਾਂ ਦੀ ਮੁਰੰਮਤ ਅਤੇ ਰੀਵਾਇੰਡਿੰਗ ਲਈ ਸਿਫਾਰਸ਼ੀ ਅਭਿਆਸ
3. ਸੁਰੱਖਿਆ ਦੇ ਵਿਚਾਰ
‘ਸਟੈਟਿਕ ਵਾਇਨਿੰਗ ਸਰਕਟ ਵਿਸ਼ਲੇਸ਼ਣ’ ਸ਼ਬਦ ਨੂੰ ਡੀਨਰਜੀਜ਼ਡ ਸਾਜ਼ੋ-ਸਾਮਾਨ ‘ਤੇ ਕੀਤੇ ਗਏ ਟੈਸਟ ਵਿਧੀ ਵਜੋਂ ਪਰਿਭਾਸ਼ਿਤ ਕੀਤਾ ਗਿਆ ਹੈ। ਵਰਤੇ ਜਾਣ ਵਾਲੇ ਯੰਤਰਾਂ ਨੂੰ ਕੁਝ ਮਾਨਤਾ ਪ੍ਰਾਪਤ ਪ੍ਰਮਾਣੀਕਰਣ ਜਿਵੇਂ ਕਿ UL, CE, CSA, ਜਾਂ ਬਰਾਬਰ ਦੀ ਪਾਲਣਾ ਕਰਨੀ ਚਾਹੀਦੀ ਹੈ। ਇਸ ਦਿਸ਼ਾ-ਨਿਰਦੇਸ਼ ਵਿੱਚ ਸੁਰੱਖਿਆ ਦੇ ਸਾਰੇ ਪਹਿਲੂਆਂ ਨੂੰ ਕਵਰ ਕਰਨਾ ਸੰਭਵ ਨਹੀਂ ਹੈ। ਟੈਸਟ ਕਰਮਚਾਰੀਆਂ ਨੂੰ ਨਿਰਮਾਤਾ ਨਿਰਦੇਸ਼ ਮੈਨੂਅਲ, ਯੂਨੀਅਨ, ਕੰਪਨੀ ਅਤੇ ਸਰਕਾਰੀ ਨਿਯਮਾਂ ਦੀ ਸਲਾਹ ਲੈਣੀ ਚਾਹੀਦੀ ਹੈ।
4. ਵਿੰਡਿੰਗ ਸਰਕਟ ਵਿਸ਼ਲੇਸ਼ਣ ਜਨਰਲ ਥਿਊਰੀ
4.1 ਚੁੰਬਕੀ ਸਰਕਟ
ਇਲੈਕਟ੍ਰੀਕਲ ਕੋਇਲ ਅਤੇ ਮਸ਼ੀਨਾਂ ਜੋੜੇ ਇਲੈਕਟ੍ਰੋ-ਮੈਗਨੈਟਿਕ ਸਰਕਟਾਂ ਦੇ ਸੁਮੇਲ ਨਾਲ ਬਣੀਆਂ ਹਨ। ਚੁੰਬਕੀ ਸਰਕਟਾਂ ਨੂੰ ਕੰਡਕਟਰਾਂ ਵਿੱਚੋਂ ਲੰਘਣ ਵਾਲੇ ਬਿਜਲੀ ਦੇ ਕਰੰਟ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਵਿਕਸਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ ਅਤੇ ਚੁੰਬਕੀ ਸਮੱਗਰੀ ਦੁਆਰਾ ਮਾਰਗਦਰਸ਼ਨ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
ਪਹਿਲਾਂ, ਇੱਕ ਕਰੰਟ I ਨੂੰ ਲੈ ਕੇ ਜਾਣ ਵੇਲੇ ਇੱਕ ਚੁੰਬਕ ਦੇ ਖੰਭਿਆਂ ਦੇ ਸੱਜੇ ਕੋਣਾਂ ‘ਤੇ ਰੱਖੇ ਗਏ ਲੰਬਾਈ l ਦੇ ਕੰਡਕਟਰ ‘ਤੇ ਵਿਚਾਰ ਕਰੋ। ਨਤੀਜਾ ਪੱਧਰ F ਦਾ ਇੱਕ ਬਲ ਹੁੰਦਾ ਹੈ, ਜਿੱਥੇ B ਚੁੰਬਕੀ ਪ੍ਰਵਾਹ ਘਣਤਾ (ਟੇਸਲਾ, ਜਾਂ ਟੀ ਵਿੱਚ) ਦੀ ਤੀਬਰਤਾ ਹੈ ਅਤੇ ਚੁੰਬਕੀ ਪ੍ਰਵਾਹ ਚੁੰਬਕੀ ਦੀ ਤਾਕਤ ਦਾ ਮਾਪ ਹੈ। ਨਤੀਜਾ ਫਾਰਮੂਲਾ ਇਸ ਤਰ੍ਹਾਂ ਪਾਇਆ ਜਾਂਦਾ ਹੈ:
ਫਾਰਮੂਲਾ 1: ਫੋਰਸ (ਨਿਊਟਨ)
F = BI l
ਕਰੰਟ ਦੀ ਦਿਸ਼ਾ ਵਿੱਚ l ਦੀ ਤੀਬਰਤਾ l ਦਾ ਵੈਕਟਰ ਹੋਣ ਦੇ ਨਾਲ ਇੱਕ ਕੰਡਕਟਰ ਦੀ ਆਪਹੁਦਰੀ ਸਥਿਤੀ ਦੇ ਅਧਾਰ ਤੇ।
ਫਾਰਮੂਲਾ 2: ਆਰਬਿਟਰੇਰੀ ਕੰਡਕਟਰ ਪੋਜੀਸ਼ਨ ਦੇ ਨਾਲ ਫੋਰਸ
F = Il x B
ਇਹ ਮੰਨਣਾ ਕਿ B ਖੇਤਰ A ਦੇ ਨਾਲ ਤੀਬਰਤਾ ਵਿੱਚ ਸਥਿਰ ਹੈ:
ਫਾਰਮੂਲਾ 3: ਚੁੰਬਕੀ ਪ੍ਰਵਾਹ (Φ, ਵੈਬਰ)
Φ = BA ਜਾਂ B = Φ/A
B ਨੂੰ ਵੈਬਰ (Wb)/m ਦੇ ਰੂਪ ਵਿੱਚ ਦਰਸਾਇਆ ਗਿਆ ਹੈ
I ਅਤੇ B ਵਿਚਕਾਰ ਸਬੰਧ ਇਸ ਤਰ੍ਹਾਂ ਹੈ:
ਫਾਰਮੂਲਾ 4: ਐਂਪੀਰੀਸ ਸਰਕਿਟਲ ਕਾਨੂੰਨ
A/m *d*l = I
ਜਿੱਥੇ A/m ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਤੀਬਰਤਾ H ਹੈ
ਜਦੋਂ ਇੱਕ ਬੰਦ ਸਰਕਟ ਨੂੰ ਮੌਜੂਦਾ N ਵਾਰ ਦੁਆਰਾ ਪਾਸ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਜਿਵੇਂ ਕਿ ਇੱਕ ਕੋਇਲ ਵਿੱਚ, ਤਾਂ ਨਤੀਜੇ ਵਜੋਂ ਮੈਗਨੇਟੋਮੋਟਿਵ ਫੋਰਸ (mmf ਜਾਂ ℑ) ਹੇਠ ਲਿਖੇ ਅਨੁਸਾਰ ਹੁੰਦਾ ਹੈ:
ਫਾਰਮੂਲਾ 5: MMF
ℑ = NI
NI ਨੂੰ ਐਂਪੀਅਰ ਮੋੜ (At) ਵਜੋਂ ਵੀ ਜਾਣਿਆ ਜਾਂਦਾ ਹੈ। ਇੱਕ ਦੇ ਇੱਕ N ਨੂੰ ਇੱਕ ëturn.í ਵਜੋਂ ਜਾਣਿਆ ਜਾਵੇਗਾ
ਇੰਡਕਟੈਂਸ (L) ਨੂੰ ਹੈਨਰੀ (H) ਦੀਆਂ ਇਕਾਈਆਂ ਵਜੋਂ ਦਰਸਾਏ ਗਏ ਕਰੰਟ ਦੀ ਪ੍ਰਤੀ ਯੂਨਿਟ ਪ੍ਰਵਾਹ ਲਿੰਕੇਜ ਵਜੋਂ ਪਰਿਭਾਸ਼ਿਤ ਕੀਤਾ ਗਿਆ ਹੈ।
ਫਾਰਮੂਲਾ 6: ਇੰਡਕਟੈਂਸ
L = (NΦ)/I
ਵੱਖ-ਵੱਖ ਕੋਇਲਾਂ ਵਾਲੇ ਟੋਰੌਇਡ ਜ਼ਖ਼ਮ ਲਈ, ਪ੍ਰੇਰਣਾ ਨੂੰ ਪਰਿਭਾਸ਼ਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ:
ਫਾਰਮੂਲਾ 7: ਟੋਰੋਇਡ ਫੀਲਡਸ1
Lpq = (Np(kpqΦq))/iq
ਇੱਕ ਇੰਡਕਟੈਂਸ ਵਿੱਚ ਸਟੋਰ ਕੀਤੀ ਊਰਜਾ ਦੀ ਗਣਨਾ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ, ਇੱਕ ਕਰੰਟ (i):
ਫਾਰਮੂਲਾ 8: ਪ੍ਰੇਰਕ ਊਰਜਾ
ਡਬਲਯੂ = (1/2)ਲੀ 2
ਬਾਰੰਬਾਰਤਾ ਕੰਡਕਟਰ ਦੇ ਅੰਦਰ ਖੇਤਰਾਂ ਨੂੰ ਪ੍ਰਭਾਵਤ ਕਰਦੀ ਹੈ। ਜਿਵੇਂ ਕਿ ਲਾਗੂ ਕੀਤੀ ਬਾਰੰਬਾਰਤਾ ਵਧਦੀ ਹੈ, ਮੌਜੂਦਾ, ਅਤੇ ਨਤੀਜੇ ਵਜੋਂ ਖੇਤਰ, ਕੰਡਕਟਰ (ਚਮੜੀ ਪ੍ਰਭਾਵ) ਦੀ ਸਤਹ ਦੇ ਨੇੜੇ ਜਾਂਦੇ ਹਨ। ਇਹ ਇਸ ਤੱਥ ਦੇ ਕਾਰਨ ਹੈ ਕਿ ਇੱਕ ਕੰਡਕਟਰ ਵਿੱਚ ਪ੍ਰੇਰਿਤ emfís ਹੁੰਦੇ ਹਨ ਜਿਸ ਵਿੱਚ ਬਦਲਵੇਂ ਪ੍ਰਵਾਹ ਹੁੰਦੇ ਹਨ। ਇਹ emfís ਘੇਰੇ ਨਾਲੋਂ ਕੇਂਦਰ ‘ਤੇ ਵੱਡੇ ਹੁੰਦੇ ਹਨ, ਇਸਲਈ ਸੰਭਾਵੀ ਅੰਤਰ ਉਹਨਾਂ ਕਰੰਟਾਂ ਨੂੰ ਸਥਾਪਿਤ ਕਰਨ ਵੱਲ ਝੁਕਦਾ ਹੈ ਜੋ ਕੇਂਦਰ ‘ਤੇ ਕਰੰਟ ਦਾ ਵਿਰੋਧ ਕਰਦੇ ਹਨ ਅਤੇ ਘੇਰੇ ‘ਤੇ ਇਸਦੀ ਸਹਾਇਤਾ ਕਰਦੇ ਹਨ। ਇਸ ਤਰ੍ਹਾਂ ਕਰੰਟ ਨੂੰ ਕੰਡਕਟਰ ਦੇ ਬਾਹਰਲੇ ਪਾਸੇ ਲਈ ਮਜਬੂਰ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਕੰਡਕਟਰ ਦੇ ਪ੍ਰਭਾਵੀ ਖੇਤਰ ਨੂੰ ਘਟਾਉਂਦਾ ਹੈ।î2
1 ਇਲੈਕਟ੍ਰਿਕ ਮਸ਼ੀਨਾਂ ਅਤੇ ਇਲੈਕਟ੍ਰੋਮੈਕਨਿਕਸ, ਸਈਅਦ ਏ ਨਾਸਰ, ਸ਼ੌਮਿਸ ਆਊਟਲਾਈਨ ਸੀਰੀਜ਼, 1981
ਇਲੈਕਟ੍ਰੀਕਲ ਇੰਜੀਨੀਅਰਾਂ ਲਈ 2 ਸਟੈਂਡਰਡ ਹੈਂਡਬੁੱਕ, ਚੌਦ੍ਹਵਾਂ ਐਡੀਸ਼ਨ, ਡੌਨਲਡ ਜੀ ਫਿੰਕ, ਵੇਨ ਬੀਟੀ, ਮੈਕਗ੍ਰਾ ਹਿੱਲ, 2000।
4.2 ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਣਾਲੀਆਂ
“ਇਲੈਕਟ੍ਰਿਕਲ ਇਨਸੂਲੇਸ਼ਨ ਇੱਕ ਮਾਧਿਅਮ ਜਾਂ ਇੱਕ ਸਮੱਗਰੀ ਹੈ, ਜੋ ਕਿ ਜਦੋਂ ਵੱਖ-ਵੱਖ ਸੰਭਾਵਾਂ ‘ਤੇ ਕੰਡਕਟਰਾਂ ਦੇ ਵਿਚਕਾਰ ਰੱਖੀ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਲਾਗੂ ਕੀਤੀ ਗਈ ਵੋਲਟੇਜ ਦੇ ਨਾਲ ਪੜਾਅ ਵਿੱਚ ਸਿਰਫ ਇੱਕ ਮਾਮੂਲੀ ਕਰੰਟ ਦੀ ਇਜਾਜ਼ਤ ਦਿੰਦਾ ਹੈ। ਅਪਲਾਈਡ ਡਾਈਇਲੈਕਟ੍ਰਿਕ। ਇੱਕ ਸੰਪੂਰਣ ਡਾਈਇਲੈਕਟ੍ਰਿਕ ਕੰਡਕਟਰਾਂ ਵਿਚਕਾਰ ਕੋਈ ਕੰਡਕਸ਼ਨ ਕਰੰਟ ਨਹੀਂ ਲੰਘਦਾ ਅਤੇ ਸਿਰਫ ਕੈਪੇਸਿਟਿਵ ਚਾਰਜਿੰਗ ਕਰੰਟ ਪਾਸ ਕਰਦਾ ਹੈ।” 2 (ਆਈਈਈਈ ਸਟੈਡ 120-1989, ਸੈਕਸ਼ਨ 5.4.2 ਵੀ ਦੇਖੋ)
ਇੱਕ ਡਾਈਇਲੈਕਟ੍ਰਿਕ ਦੀ ਸਰਲ ਸਰਕਟ ਪ੍ਰਤੀਨਿਧਤਾ ਇੱਕ ਸਮਾਨਾਂਤਰ ਰੋਧਕ ਅਤੇ ਕੈਪੇਸੀਟਰ ਹੈ। ਕੰਡਕਟਰਾਂ (ਇੱਕ ਵੈਕਿਊਮ ਵਿੱਚ) ਵਿਚਕਾਰ ਸਮਰੱਥਾ 0.0884 x 10-12 A/t ਹੈ ਜਿੱਥੇ A ਵਰਗ ਸੈਂਟੀਮੀਟਰ ਵਿੱਚ ਕੰਡਕਟਰ ਦਾ ਖੇਤਰਫਲ ਹੈ ਅਤੇ t ਸੈਂਟੀਮੀਟਰਾਂ ਵਿੱਚ ਕੰਡਕਟਰਾਂ ਦੀ ਸਪੇਸਿੰਗ ਹੈ। “ਜਦੋਂ ਇੱਕ ਡਾਈਇਲੈਕਟ੍ਰਿਕ ਸਮੱਗਰੀ ਇਲੈਕਟ੍ਰੋਡਾਂ ਦੇ ਵਿਚਕਾਰ ਵਾਲੀਅਮ ਨੂੰ ਭਰਦੀ ਹੈ, ਤਾਂ ਸਮਗਰੀ ਦੇ ਅਣੂਆਂ ਅਤੇ ਪਰਮਾਣੂਆਂ ਦੇ ਅੰਦਰਲੇ ਚਾਰਜਾਂ ਦੇ ਕਾਰਨ ਕੈਪੈਸੀਟੈਂਸ ਵੱਧ ਹੁੰਦੀ ਹੈ, ਜੋ ਕਿ ਉਸੇ ਲਾਗੂ ਕੀਤੀ ਵੋਲਟੇਜ ਲਈ ਕੈਪੀਸੀਟਰ ਪਲੇਨਾਂ ਨੂੰ ਵਧੇਰੇ ਚਾਰਜ ਆਕਰਸ਼ਿਤ ਕਰਦੇ ਹਨ। ਇਲੈਕਟ੍ਰੋਡ ਹਨ: “3
ਫਾਰਮੂਲਾ 9: ਪੈਰਲਲ ਸਰਕੂਲਰ ਕੰਡਕਟਰਾਂ ਵਿਚਕਾਰ ਸਮਰੱਥਾ
C = (2π∈í∈oL)/cosh-1(D/2r)
ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਣਾਲੀਆਂ ਦੀ ਅਨੁਮਤੀ ਲਾਗੂ ਕੀਤੀ ਬਾਰੰਬਾਰਤਾ ਵਿੱਚ ਵਾਧੇ ਦੇ ਨਾਲ ਹੇਠਾਂ ਵੱਲ (ਖਿੱਚਣ ਵਾਲੇ ਖੇਤਰ) ਵਿੱਚ ਕਮੀ ਆਉਂਦੀ ਹੈ, ਜਿਵੇਂ ਕਿ ਆਇਓਨਿਕ-ਇੰਟਰਫੇਸ ਧਰੁਵੀਕਰਨ ਅਤੇ ਅਣੂ ਡਿਪੋਲਰ ਪੋਲਰਾਈਜ਼ੇਸ਼ਨ। ਪੌਲੀਮਰਾਂ ਵਿੱਚ, ਡਾਇਪੋਲਰ ਫੈਲਾਅ ਬਹੁਤ ਘੱਟ ਫ੍ਰੀਕੁਐਂਸੀ ਵਿੱਚ ਹੁੰਦਾ ਹੈ।
4.3 ਇਨਸੂਲੇਸ਼ਨ ਬਰੇਕਡਾਉਨ
ਇਨਸੂਲੇਸ਼ਨ ਬਰੇਕਡਾਊਨ, ਜਿਸਨੂੰ ਇਸ ਦਿਸ਼ਾ-ਨਿਰਦੇਸ਼ ਦੇ ਅੰਦਰ ‘ਨੁਕਸ’ ਕਿਹਾ ਜਾਂਦਾ ਹੈ, ਵਿੱਚ ਗੰਦਗੀ, ਚਾਪ ਟਰੈਕਿੰਗ, ਥਰਮਲ ਏਜਿੰਗ ਅਤੇ ਮਕੈਨੀਕਲ ਨੁਕਸ ਸ਼ਾਮਲ ਹਨ। ਹਰ ਕਿਸਮ ਦੇ ਨੁਕਸ ਵਿੱਚ ਇੱਕ ਆਮ ਕਾਰਕ ਹੁੰਦਾ ਹੈ: ਇਲੈਕਟ੍ਰੀਕਲ ਇਨਸੂਲੇਸ਼ਨ ਦੇ ਪ੍ਰਤੀਰੋਧਕ ਅਤੇ ਸਮਰੱਥਾ ਵਾਲੇ ਗੁਣ ਬਦਲਦੇ ਹਨ।
ਗੰਦਗੀ, ਖਾਸ ਤੌਰ ‘ਤੇ ਪਾਣੀ ਦੀ ਘੁਸਪੈਠ, ਇਨਸੂਲੇਸ਼ਨ ਚਾਲਕਤਾ ਨੂੰ ਵਧਾਉਂਦੀ ਹੈ। ਪਾਣੀ ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਦੇ ਅੰਦਰ ਇਨਸੂਲੇਸ਼ਨ ਫ੍ਰੈਕਚਰ ਅਤੇ ਸੰਮਿਲਨਾਂ ਵਿੱਚ ਇਕੱਠਾ ਹੁੰਦਾ ਹੈ। ਬਿਜਲਈ ਖੇਤਰ ਦੂਸ਼ਿਤ ਤੱਤਾਂ ਵਿੱਚ ਤਬਦੀਲੀਆਂ ਦਾ ਕਾਰਨ ਬਣਦੇ ਹਨ, ਜਿਸ ਵਿੱਚ ਵਿਸਤਾਰ ਵੀ ਸ਼ਾਮਲ ਹੈ, ਜੋ ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਨੂੰ ਹੋਰ ਤੋੜ ਦਿੰਦੇ ਹਨ। ਗੈਸਾਂ, ਭਾਫ਼ਾਂ, ਧੂੜ ਆਦਿ ਸਮੇਤ ਹੋਰ ਗੰਦਗੀ, ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਦੇ ਰਸਾਇਣਕ ਬਣਤਰ ‘ਤੇ ਹਮਲਾ ਕਰ ਸਕਦੇ ਹਨ। ਇੱਕ ਵਾਰ ਇੰਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਨੂੰ ਪੂਰੀ ਤਰ੍ਹਾਂ ਪੁੱਲਣ ਤੋਂ ਬਾਅਦ ਸਿਸਟਮ ਨੂੰ ਛੋਟਾ ਮੰਨਿਆ ਜਾਂਦਾ ਹੈ। ਇਹ ਆਮ ਤੌਰ ‘ਤੇ ਕੰਡਕਟਰਾਂ ਵਿਚਕਾਰ ਪਹਿਲਾਂ ਵਾਪਰਦਾ ਹੈ, ਜਿੱਥੇ ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਸਭ ਤੋਂ ਕਮਜ਼ੋਰ ਹੁੰਦਾ ਹੈ। ਮੁੱਖ ਨੁਕਸ ਵਾਲੇ ਖੇਤਰਾਂ ਵਿੱਚ ਕੋਇਲ ਦੇ ਗੈਰ-ਸੁਰੱਖਿਅਤ ਹਿੱਸੇ ਸ਼ਾਮਲ ਹੁੰਦੇ ਹਨ, ਜਿਵੇਂ ਕਿ ਇੱਕ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨ ਦੇ ਸਿਰੇ ਦੇ ਮੋੜ (ਜੋ ਵਿੰਡਿੰਗਜ਼ ਦਾ ਸਭ ਤੋਂ ਉੱਚਾ ਬਿਜਲਈ ਤਣਾਅ ਬਿੰਦੂ ਵੀ ਹੈ), ਅਤੇ ਉੱਚਤਮ ਮਕੈਨੀਕਲ ਤਣਾਅ ਬਿੰਦੂ, ਜਿਵੇਂ ਕਿ ਕੋਇਲ ਦਾ ਬਿੰਦੂ। ਇੱਕ ਘੁੰਮਾਉਣ ਵਾਲੀ ਮਸ਼ੀਨ ‘ਤੇ ਸਲਾਟ ਛੱਡੋ।
ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਣਾਲੀਆਂ ਦੀ ਚਾਪ ਟਰੈਕਿੰਗ ਹੁੰਦੀ ਹੈ ਜਿੱਥੇ ਉੱਚ ਕਰੰਟ ਇੱਕ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਣਾਲੀ ਦੀ ਸਤਹ ਦੇ ਕੰਡਕਟਰਾਂ ਵਿਚਕਾਰ ਲੰਘਦਾ ਹੈ। ਉਹਨਾਂ ਬਿੰਦੂਆਂ ‘ਤੇ ਇਨਸੂਲੇਸ਼ਨ ਕਾਰਬਨਾਈਜ਼ ਹੋ ਜਾਂਦੀ ਹੈ, ਇਲੈਕਟ੍ਰੀਕਲ ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਦੇ ਕੈਪੇਸਿਟਿਵ ਅਤੇ ਰੋਧਕ ਭਾਗਾਂ ਨੂੰ ਬਦਲਦੀ ਹੈ। ਚਾਪ ਟਰੈਕਿੰਗ ਅਕਸਰ ਇਸਦਾ ਨਤੀਜਾ ਹੁੰਦਾ ਹੈ: ਮਜ਼ਬੂਤ ਬਿਜਲੀ ਤਣਾਅ; ਗੰਦਗੀ; ਜਾਂ, ਦੋਵੇਂ। ਇਸ ਕਿਸਮ ਦਾ ਨੁਕਸ ਮੁੱਖ ਤੌਰ ‘ਤੇ ਕੰਡਕਟਰਾਂ ਜਾਂ ਕੋਇਲਾਂ ਵਿਚਕਾਰ ਹੁੰਦਾ ਹੈ ਅਤੇ ਆਮ ਤੌਰ ‘ਤੇ ਛੋਟੇ ਨਾਲ ਖਤਮ ਹੁੰਦਾ ਹੈ।
ਇੱਕ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਣਾਲੀ ਦੀ ਥਰਮਲ ਬੁਢਾਪਾ ਉਦੋਂ ਵਾਪਰਦੀ ਹੈ ਕਿਉਂਕਿ ਐਰੇਨੀਅਸ ਰਸਾਇਣਕ ਸਮੀਕਰਨ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਬਿਜਲਈ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਣਾਲੀਆਂ ਘਟਦੀਆਂ ਹਨ। ਆਮ ਤੌਰ ‘ਤੇ ਪ੍ਰਵਾਨਿਤ “ਅੰਗੂਠੇ ਦਾ ਨਿਯਮ” ਇਹ ਹੈ ਕਿ ਓਪਰੇਟਿੰਗ ਤਾਪਮਾਨ ਵਿੱਚ ਹਰ 10o C ਵਾਧੇ ਲਈ ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਦਾ ਥਰਮਲ ਜੀਵਨ ਅੱਧਾ ਹੋ ਜਾਂਦਾ ਹੈ। ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਲਈ ਤਾਪਮਾਨ ਸੀਮਾ ਪ੍ਰਾਪਤ ਕਰਨ ਤੋਂ ਬਾਅਦ ਇਨਸੂਲੇਸ਼ਨ ਤੇਜ਼ੀ ਨਾਲ ਘਟ ਜਾਵੇਗਾ ਅਤੇ ਕਾਰਬਨਾਈਜ਼ ਹੋ ਜਾਵੇਗਾ।
ਹੋਰ ਵਾਤਾਵਰਣਕ ਕਾਰਕ ਵੀ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਣਾਲੀ ਦੇ ਥਰਮਲ ਜੀਵਨ ਨੂੰ ਪ੍ਰਭਾਵਤ ਕਰਦੇ ਹਨ: ਹਵਾ ਦੀ ਗੰਦਗੀ; ਨਮੀ; ਇਲੈਕਟ੍ਰੋਲਿਸਿਸ; ਅਤੇ, ਹੋਰ ਬਿਜਲੀ ਤਣਾਅ।
ਬਿਜਲਈ ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਵਿੱਚ ਮਕੈਨੀਕਲ ਨੁਕਸ ਸ਼ਾਮਲ ਹੁੰਦੇ ਹਨ ਤਣਾਅ ਦਰਾੜ, ਵਾਈਬ੍ਰੇਸ਼ਨ, ਮਕੈਨੀਕਲ ਘੁਸਪੈਠ, ਅਤੇ ਮਕੈਨੀਕਲ ਨੁਕਸ। ਵੱਖ-ਵੱਖ ਕਾਰਵਾਈਆਂ ਦੌਰਾਨ ਇੱਕ ਕੋਇਲ ਦੇ ਅੰਦਰ ਦੀਆਂ ਤਾਕਤਾਂ, ਮਕੈਨੀਕਲ ਅੰਦੋਲਨ ਦਾ ਕਾਰਨ ਬਣ ਸਕਦੀਆਂ ਹਨ ਅਤੇ ਇਨਸੂਲੇਸ਼ਨ ਸਮੱਗਰੀ ਦੇ ਟੁੱਟਣ ਨਾਲ ਖਤਮ ਹੋ ਸਕਦੀਆਂ ਹਨ। ਇਲੈਕਟ੍ਰੀਕਲ ਅਤੇ ਮਕੈਨੀਕਲ ਵਾਈਬ੍ਰੇਸ਼ਨ ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ‘ਤੇ ਬੇਲੋੜੇ ਤਣਾਅ ਦਾ ਕਾਰਨ ਬਣਦੇ ਹਨ ਜਿਸ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਤਣਾਅ ਫ੍ਰੈਕਚਰ ਅਤੇ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਣਾਲੀ ਦੀ ਢਿੱਲੀਪਨ ਹੁੰਦੀ ਹੈ। ਮਕੈਨੀਕਲ ਘੁਸਪੈਠ ਵਿੱਚ ਜਾਂ ਤਾਂ ਕੰਡਕਟਰਾਂ ਅਤੇ/ਜਾਂ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਣਾਲੀ ਦੇ ਵਿਚਕਾਰ ਜ਼ਮੀਨ ਤੱਕ ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਵਿੱਚ ਸਮੱਗਰੀ ਦੀ ਗਤੀ ਸ਼ਾਮਲ ਹੁੰਦੀ ਹੈ। ਮਕੈਨੀਕਲ ਨੁਕਸ ਵਿੱਚ ਅਸਫਲਤਾਵਾਂ ਸ਼ਾਮਲ ਹੁੰਦੀਆਂ ਹਨ ਜਿਵੇਂ ਕਿ ਬੇਅਰਿੰਗ ਫਾਲਟਸ, ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਾਂ ਵਿੱਚ, ਜੋ ਕਿ ਬੇਅਰਿੰਗ ਨੂੰ ਵੱਖ ਕਰਨ ਅਤੇ ਸਿਸਟਮ ਦੇ ਚਲਦੇ ਹਿੱਸਿਆਂ ਵਿੱਚੋਂ ਲੰਘਣ ਦਾ ਕਾਰਨ ਬਣਦੀਆਂ ਹਨ। ਇਹ ਨੁਕਸ ਕੰਡਕਟਰਾਂ, ਕੋਇਲਾਂ, ਜਾਂ ਕੋਇਲ ਤੋਂ ਜ਼ਮੀਨ ਦੇ ਵਿਚਕਾਰ ਸ਼ਾਰਟਸ ਦੇ ਰੂਪ ਵਿੱਚ ਖਤਮ ਹੋ ਸਕਦੇ ਹਨ।
4.4 ਵਿੰਡਿੰਗ ਇਨਸੂਲੇਸ਼ਨ ਅਸਫਲਤਾ ਦੇ ਪੜਾਅ
ਹਵਾ ਦੀ ਅਸਫਲਤਾ ਦੇ ਮੁੱਖ ਕਾਰਨਾਂ ਵਿੱਚ ਸ਼ਾਮਲ ਹਨ: ਇਨਸੂਲੇਸ਼ਨ (ਥਰਮਲ) ਟੁੱਟਣਾ; ਗੰਦਗੀ; ਨਮੀ ਦੀ ਘੁਸਪੈਠ; ਅਸਥਾਈ; ਅਤੇ ਮਕੈਨੀਕਲ ਤਣਾਅ, ਅਤੇ ਸਭ ਤੋਂ ਪਹਿਲਾਂ ਉਸੇ ਕੋਇਲ ਦੇ ਅੰਦਰ ਕੰਡਕਟਰਾਂ ਵਿਚਕਾਰ ਇਨਸੂਲੇਸ਼ਨ ਦੇ ਟੁੱਟਣ ਦਾ ਨਤੀਜਾ ਹੁੰਦਾ ਹੈ, ਉਸੇ ਪੜਾਅ ਵਿੱਚ ਕੋਇਲਾਂ ਦੇ ਵਿਚਕਾਰ ਜਾਂ ਵੱਖਰੇ ਪੜਾਵਾਂ ਦੀਆਂ ਕੋਇਲਾਂ ਵਿਚਕਾਰ। ਇਹ ਵਾਇਨਿੰਗ ‘ਸ਼ਾਰਟਸ’ ਹੋ ਸਕਦਾ ਹੈ, ਪਰ ਹਮੇਸ਼ਾ ਨਹੀਂ, ਇੱਕ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਤੀਰੋਧ ਨੁਕਸ ਦੇ ਰੂਪ ਵਿੱਚ ਖਤਮ ਹੋ ਸਕਦਾ ਹੈ ਜਦੋਂ ਵਾਇਨਿੰਗ ਅਸਲ ਵਿੱਚ ਅਸਫਲ ਹੋ ਜਾਂਦੀ ਹੈ। ਕੰਡਕਟਰਾਂ ਵਿਚਕਾਰ ਤਬਦੀਲੀਆਂ ਦਾ ਪਤਾ ਲਗਾਉਣਾ ਸਾਜ਼ੋ-ਸਾਮਾਨ ਦੇ ਕੰਮ ਕਰਨਾ ਬੰਦ ਕਰਨ ਤੋਂ ਪਹਿਲਾਂ ਮੁਰੰਮਤ ਜਾਂ ਬਦਲਣ ਦੀ ਕਾਰਵਾਈ ਦੀ ਵਧੇਰੇ ਸੰਭਾਵਨਾ ਪ੍ਰਦਾਨ ਕਰਦਾ ਹੈ। ਨੋਟ ਕਰੋ ਕਿ ਨੁਕਸ ਦੀ ਦਰ ਨੁਕਸ ਦੀ ਤੀਬਰਤਾ (ਜਿਵੇਂ: ਵਾਰੀ ਅਨੁਪਾਤ) ਅਤੇ ਕੰਡਕਟਰਾਂ ਵਿਚਕਾਰ ਸੰਭਾਵੀ ‘ਤੇ ਨਿਰਭਰ ਕਰੇਗੀ (ਉਦਾਹਰਨ ਲਈ, 600 Vac ਤੋਂ ਘੱਟ ਉਪਕਰਣਾਂ ਵਿੱਚ ਨੁਕਸ ਹੋ ਸਕਦੇ ਹਨ ਅਤੇ 1000 Vac ਤੋਂ ਵੱਧ ਸਿਸਟਮਾਂ ਵਿੱਚ ਤੇਜ਼ੀ ਨਾਲ ਅਸਫਲ ਹੋ ਜਾਣਗੇ।
ਕੰਡਕਟਰਾਂ ਦੇ ਵਿਚਕਾਰ ਇੱਕ ਹਵਾ ਦੇ ਨੁਕਸ ਦੇ ਆਮ ਪੜਾਅ ਹੇਠ ਲਿਖੇ ਅਨੁਸਾਰ ਹਨ:
• ਪੜਾਅ 1: ਕੰਡਕਟਰਾਂ ਦੇ ਵਿਚਕਾਰ ਇਨਸੂਲੇਸ਼ਨ ‘ਤੇ ਜ਼ੋਰ ਦਿੱਤਾ ਜਾਂਦਾ ਹੈ, ਜਿਸ ਨਾਲ ਫਾਲਟ ਪੁਆਇੰਟ ‘ਤੇ ਇਨਸੂਲੇਸ਼ਨ ਦੇ ਰੋਧਕ ਅਤੇ ਸਮਰੱਥਾ ਵਾਲੇ ਮੁੱਲਾਂ ਵਿੱਚ ਤਬਦੀਲੀ ਹੁੰਦੀ ਹੈ। ਉੱਚ ਤਾਪਮਾਨ ਅਤੇ ਸਮਾਨ ਪ੍ਰਤੀਕਿਰਿਆਤਮਕ ਨੁਕਸ ਉਸ ਬਿੰਦੂ ‘ਤੇ ਇਨਸੂਲੇਸ਼ਨ (ਡਾਈਇਲੈਕਟ੍ਰਿਕ) ਦੇ ਕਾਰਬਨਾਈਜ਼ੇਸ਼ਨ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਹੁੰਦੇ ਹਨ। ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਵਿੱਚ ਟਰੈਕਿੰਗ ਦੇ ਕਾਰਨ ਕਾਰਬਨਾਈਜ਼ੇਸ਼ਨ ਵੀ ਹੋ ਸਕਦੀ ਹੈ।
• ਪੜਾਅ 2: ਨੁਕਸ ਦਾ ਬਿੰਦੂ ਵਧੇਰੇ ਰੋਧਕ ਬਣ ਜਾਂਦਾ ਹੈ। ਵਿੰਡਿੰਗ ਦੇ ਚੰਗੇ ਹਿੱਸੇ (ਅਤੇ ਸਿਸਟਮ ਦੇ ਹੋਰ ਵਰਤਮਾਨ ਲੈ ਜਾਣ ਵਾਲੇ ਹਿੱਸੇ) ਅਤੇ ਸ਼ਾਰਟਿੰਗ ਮੋੜਾਂ ਦੇ ਵਿਚਕਾਰ ਇੱਕ ਆਪਸੀ ਪ੍ਰੇਰਣਾ ਹੁੰਦੀ ਹੈ। ਸ਼ਾਰਟਿੰਗ ਮੋੜਾਂ ਦੇ ਅੰਦਰ ਕਰੰਟ ਦੇ ਵਧਣ ਕਾਰਨ, ਉਸ ਬਿੰਦੂ ‘ਤੇ ਤਾਪਮਾਨ ਵਧਣ ਅਤੇ ਇੰਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਨੂੰ ਤੇਜ਼ੀ ਨਾਲ ਕਾਰਬਨਾਈਜ਼ ਕਰਨ ਦੇ ਕਾਰਨ ਨੁਕਸ ਦੇ ਬਿੰਦੂ ‘ਤੇ I2 R ਦੇ ਨੁਕਸਾਨ ਵਧਦੇ ਹਨ। ਮੋਟਰ ਇਸ ਬਿੰਦੂ ‘ਤੇ ਟ੍ਰਿਪ ਕਰਨਾ ਸ਼ੁਰੂ ਕਰ ਸਕਦੀ ਹੈ, ਹਾਲਾਂਕਿ ਇਹ ਥੋੜ੍ਹੇ ਜਿਹੇ ਕੂਲਿੰਗ ਸਮੇਂ ਤੋਂ ਬਾਅਦ ਚੱਲਣ ਦੇ ਯੋਗ ਹੋ ਸਕਦੀ ਹੈ।
• ਪੜਾਅ 3: ਇਨਸੂਲੇਸ਼ਨ ਟੁੱਟ ਜਾਂਦੀ ਹੈ ਅਤੇ ਸ਼ਾਰਟ ਦੇ ਬਿੰਦੂ ਦੇ ਅੰਦਰ ਊਰਜਾ ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਵਿੱਚ ਵਿਸਫੋਟਕ ਫਟਣ ਅਤੇ ਹਵਾਵਾਂ ਦੇ ਭਾਫ਼ੀਕਰਨ ਦਾ ਕਾਰਨ ਬਣ ਸਕਦੀ ਹੈ।
4.5 ਉਪਕਰਨ ਦੀ ਤੁਲਨਾ
ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਰੀ ਅਤੇ ਟ੍ਰਾਂਸਫਾਰਮਰ ਸਮਾਨ ਸਿਧਾਂਤਾਂ ਦੇ ਕਾਰਨ ਕੰਮ ਕਰਦੇ ਹਨ। ਉਦਾਹਰਨ ਲਈ, ਇੱਕ ਤਿੰਨ-ਪੜਾਅ ਇੰਡਕਸ਼ਨ ਮੋਟਰ ਵਿੱਚ ਇੱਕ ਪ੍ਰਾਇਮਰੀ (ਸਟੇਟਰ ਵਿੰਡਿੰਗ) ਅਤੇ ਸੈਕੰਡਰੀ (ਰੋਟਰ ਵਿੰਡਿੰਗ) ਸਰਕਟ ਹੁੰਦਾ ਹੈ ਜਿਵੇਂ ਕਿ ਇੱਕ ਟ੍ਰਾਂਸਫਾਰਮਰ ਦੀ ਪ੍ਰਾਇਮਰੀ ਅਤੇ ਸੈਕੰਡਰੀ ਵਿੰਡਿੰਗਜ਼ ਨਾਲ ਹੁੰਦਾ ਹੈ। ਫਰਕ ਇਹ ਹੈ ਕਿ ਬਿਜਲਈ ਊਰਜਾ ਨੂੰ ਟ੍ਰਾਂਸਫਾਰਮਰਾਂ ਦੇ ਨਾਲ, ਇਲੈਕਟ੍ਰੀਕਲ ਊਰਜਾ ਦੇ ਇੱਕ ਵੱਖਰੇ ਮੁੱਲ ਵਿੱਚ ਬਦਲਿਆ ਜਾਂਦਾ ਹੈ। ਉਹੀ ਬਿਜਲਈ ਊਰਜਾ ਇੱਕ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਮਕੈਨੀਕਲ ਊਰਜਾ ਵਿੱਚ ਬਦਲ ਜਾਂਦੀ ਹੈ।
ਟ੍ਰਾਂਸਫਾਰਮਰ ਵਿੰਡਿੰਗਾਂ ਨੂੰ ਇਸ ਤਰ੍ਹਾਂ ਡਿਜ਼ਾਇਨ ਕੀਤਾ ਗਿਆ ਹੈ ਕਿ ਉਹ ਪੜਾਵਾਂ ਦੇ ਵਿਚਕਾਰ, ਆਮ ਤੌਰ ‘ਤੇ ਸੰਤੁਲਿਤ ਹੋਣ। ਇਹ ਪੂਰੇ ਸਿਸਟਮ ਵਿੱਚ ਸੈਕੰਡਰੀ ਅਤੇ ਸੰਤੁਲਿਤ ਸਰਕਟ ਰੁਕਾਵਟਾਂ ‘ਤੇ ਸੰਤੁਲਿਤ ਊਰਜਾ ਦੀ ਆਗਿਆ ਦਿੰਦਾ ਹੈ। ਥ੍ਰੀ-ਫੇਜ਼ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਾਂ (ਅਸੈਂਬਲਡ) ਵਿੱਚ ਰੋਟਰ ਪੋਜੀਸ਼ਨ ਬਦਲਦੇ ਹੋਏ ਆਪਸੀ ਇੰਡਕਟੈਂਸ ਬਦਲਦੀ ਹੈ। ਨਤੀਜਾ ਇੱਕ ਟੈਸਟ ਕੀਤਾ ਪ੍ਰੇਰਕ ਅਸੰਤੁਲਨ ਹੋ ਸਕਦਾ ਹੈ, ਅਤੇ ਨਤੀਜੇ ਵਜੋਂ ਰੁਕਾਵਟ ਅਸੰਤੁਲਨ ਹੋ ਸਕਦਾ ਹੈ, ਰੋਟਰ ਇੱਕ ਸਥਿਤੀ ਵਿੱਚ ਸਥਿਤ ਹੁੰਦਾ ਹੈ ਜਦੋਂ ਕਿ ਸਾਰੇ ਤਿੰਨ ਪੜਾਵਾਂ ਦੀ ਜਾਂਚ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਰੀ ਵਾਇਨਿੰਗ ਅਸੰਤੁਲਨ ਦਾ ਮੁਲਾਂਕਣ ਜਾਂ ਤਾਂ ਰੋਟਰ ਸਥਿਤੀ ਲਈ ਮੁਆਵਜ਼ਾ ਦੇ ਕੇ ਜਾਂ ਅੜਿੱਕਾ ਅਤੇ ਇੰਡਕਟੈਂਸ ਦੀਆਂ ਰੀਡਿੰਗਾਂ ਦੀ ਤੁਲਨਾ ਕਰਕੇ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
4.6 ਮੁਲਾਂਕਣ ਲਈ ਟੈਸਟ ਮਾਪ
ਟ੍ਰਾਂਸਫਾਰਮਰ ਅਤੇ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਰੀ ਵਿੰਡਿੰਗਜ਼ ਦੇ ਮੁਲਾਂਕਣ ਲਈ ਬੁਨਿਆਦੀ ਬਿਜਲੀ ਮਾਪਾਂ ਵਿੱਚ ਸ਼ਾਮਲ ਹਨ:
a) ਪ੍ਰਤੀਰੋਧ (IEEE Std 118-1978, IEEE Std 389-1996) ñ ਤਾਰਾਂ ਦੇ ਆਕਾਰ, ਕੁਨੈਕਸ਼ਨਾਂ ਅਤੇ ਖੁੱਲੇ/ਉੱਚ ਪ੍ਰਤੀਰੋਧ ਸਰਕਟਾਂ ਵਿੱਚ ਭਿੰਨਤਾਵਾਂ ਦਾ ਪਤਾ ਲਗਾਉਣ ਲਈ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ।
b) ਇੰਡਕਟੈਂਸ (IEEE Std 388-1992: ਸੈਕਸ਼ਨ 5.2 ਇੰਡਕਟੈਂਸ (ਇੰਪੇਡੈਂਸ) ਅਸੰਤੁਲਨ, 5.6.1 ਇੰਡਕਟੈਂਸ ਬ੍ਰਿਜ ਮੈਥਡ ਔਫ ਮਾਪ, IEEE Std 120-1989) ñ ਇੰਡਕਟੈਂਸ ਜਿਓਮੈਟਰੀ ਅਤੇ ਪਾਰਮੇਏਬਿਲਟੀ ਦਾ ਇੱਕ ਫੰਕਸ਼ਨ ਹੈ। ਇਹ ਵੋਲਟੇਜ, ਵਰਤਮਾਨ ਅਤੇ ਬਾਰੰਬਾਰਤਾ ਤੋਂ ਸੁਤੰਤਰ ਹੈ। ਮਾਪਿਆ ਗਿਆ ਸਮੁੱਚਾ ਇੰਡਕਟੈਂਸ ਸਰਕਟ ਦੇ ਆਪਸੀ ਅਤੇ ਅੰਦਰੂਨੀ ਇੰਡਕਟੈਂਸ ਦਾ ਸੁਮੇਲ ਹੈ, ਜਿਸਨੂੰ ਸਰਕਟ ਇੰਡਕਟੈਂਸ ਕਿਹਾ ਜਾਂਦਾ ਹੈ। ਵਿੰਡਿੰਗ ਸ਼ਾਰਟਸ ਵਿੱਚ ਨੁਕਸ ਦਾ ਪਤਾ ਉਦੋਂ ਹੀ ਸੰਭਵ ਹੁੰਦਾ ਹੈ ਜਦੋਂ ਡਾਈਇਲੈਕਟ੍ਰਿਕ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਣਾਲੀਆਂ ਦੀ ਸਮਰੱਥਾ ਪ੍ਰਤੀਰੋਧਕ ਬਣ ਜਾਂਦੀ ਹੈ ਅਤੇ ਇੱਕ ਸ਼ਾਰਟ ਸਰਕਟ ਮੌਜੂਦ ਹੁੰਦਾ ਹੈ, ਨਤੀਜੇ ਵਜੋਂ ਕੋਇਲ ਦੇ “ਚੰਗੇ” ਹਿੱਸੇ ਅਤੇ ਛੋਟੇ ਮੋੜਾਂ ਵਿਚਕਾਰ ਆਪਸੀ ਪ੍ਰੇਰਣਾ ਹੁੰਦੀ ਹੈ। ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਾਂ ਵਿੱਚ ਰੋਟਰ ਵਿੰਡਿੰਗਜ਼ ਦੇ ਮੁਲਾਂਕਣ ਵਿੱਚ ਵੀ ਆਪਸੀ ਇੰਡਕਟੈਂਸ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
c) ਸਮਰੱਥਾ (IEEE Std 389-1996, IEEE Std 120-1989) ñ ਸਮੁੱਚੀ ਸਰਕਟ ਸਮਰੱਥਾ ਅਤੇ ਜ਼ਮੀਨੀ ਕੰਧ ਦੀ ਇਨਸੂਲੇਸ਼ਨ ਸਮਰੱਥਾ ਨੂੰ ਮਾਪਣ ਲਈ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ। ਆਮ ਤੌਰ ‘ਤੇ ਸਮੇਂ ਦੇ ਨਾਲ ਰੁਝਾਨ.
d) ਇਮਪੀਡੈਂਸ (IEEE Std 388-1992: ਸੈਕਸ਼ਨ 5.2 ਇੰਡਕਟੈਂਸ (ਇੰਪੇਡੈਂਸ) ਅਸੰਤੁਲਨ, IEEE Std 389-1996: ਸੈਕਸ਼ਨ 8.3 ਇੰਪੀਡੈਂਸ ਅਸੰਤੁਲਨ, 8.4 ਬੈਲੇਂਸ ਟੈਸਟ, IEEE Std 120-1989: ਸੈਕਸ਼ਨ 5 ਇਮਪੀਡੈਂਸ ਫ੍ਰੀਕੁਐਂਸੀ ਹੈ) , ਇੰਡਕਟੈਂਸ ਅਤੇ ਕੈਪੈਸੀਟੈਂਸ ਨਿਰਭਰ। ਪ੍ਰਤੀਰੋਧ ਦਾ ਸਮੁੱਚੀ ਰੁਕਾਵਟ ‘ਤੇ ਮੁਕਾਬਲਤਨ ਛੋਟਾ ਪ੍ਰਭਾਵ ਹੁੰਦਾ ਹੈ ਅਤੇ ਲਾਗੂ ਕੀਤੀ ਬਾਰੰਬਾਰਤਾ ਪ੍ਰੇਰਕ ਅਤੇ ਕੈਪੇਸਿਟਿਵ ਪ੍ਰਤੀਕ੍ਰਿਆ ਦੇ ਭਾਗਾਂ ਨੂੰ ਪ੍ਰਭਾਵਤ ਕਰਦੀ ਹੈ। ਇੰਡਕਟੈਂਸ ਵਿੱਚ ਵਾਧੇ ਦਾ ਪ੍ਰਤੀਰੋਧ ਮੁੱਲਾਂ ਵਿੱਚ ਇੱਕ ਜੋੜ ਪ੍ਰਭਾਵ ਹੁੰਦਾ ਹੈ ਜਦੋਂ ਕਿ ਸਮਰੱਥਾ ਦਾ ਸਰਕਟ ਪ੍ਰਤੀਰੋਧ ਉੱਤੇ ਉਲਟ ਪ੍ਰਭਾਵ ਹੁੰਦਾ ਹੈ। ਉਦਾਹਰਨ ਲਈ, ਸਮੁੱਚੀ ਸਰਕਟ ਇੰਡਕਟੈਂਸ ਵਿੱਚ ਵਾਧਾ ਰੁਕਾਵਟ ਵਿੱਚ ਲਗਭਗ ਸਮਾਨਾਂਤਰ ਵਾਧਾ ਪੈਦਾ ਕਰੇਗਾ, ਸਮੁੱਚੀ ਸਰਕਟ ਸਮਰੱਥਾ ਵਿੱਚ ਵਾਧਾ ਰੁਕਾਵਟ ਨੂੰ ਘਟਾਉਣ ਦਾ ਕਾਰਨ ਬਣੇਗਾ।
e) ਫੇਜ਼ ਐਂਗਲ (IEEE Std 120-1989) ñ ਸਰਕਟ ਫੇਜ਼ ਐਂਗਲ ਵੋਲਟੇਜ ਅਤੇ ਕਰੰਟ ਦੇ ਵਿਚਕਾਰ ਦੇ ਪਛੜ ਦੇ ਸਮੇਂ ਦਾ ਮਾਪ ਹੈ ਜੋ ਵਿਭਾਜਨ ਦੀਆਂ ਡਿਗਰੀਆਂ ਵਜੋਂ ਪੇਸ਼ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਇਹ ਸਿੱਧੇ ਤੌਰ ‘ਤੇ ਲਾਗੂ ਸਰਕਟ ਰੁਕਾਵਟ, ਵੋਲਟੇਜ ਅਤੇ ਬਾਰੰਬਾਰਤਾ ਦੁਆਰਾ ਪ੍ਰਭਾਵਿਤ ਹੁੰਦਾ ਹੈ।
f) ਫ੍ਰੀਕੁਐਂਸੀ ਰਿਸਪਾਂਸ ਟੈਸਟ (IEEE Std 389-1996: ਸੈਕਸ਼ਨ 11.1 ਟ੍ਰਾਂਸਫਾਰਮਰ ਫ੍ਰੀਕੁਐਂਸੀ ਰਿਸਪਾਂਸ) ñ ਬਾਰੰਬਾਰਤਾ ਜਵਾਬ ਟੈਸਟਾਂ ਦਾ ਕਈ ਤਰੀਕਿਆਂ ਨਾਲ ਮੁਲਾਂਕਣ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ। ਇਸ ਦਿਸ਼ਾ-ਨਿਰਦੇਸ਼ ਦੇ ਉਦੇਸ਼ਾਂ ਲਈ, ਮੁਲਾਂਕਣ ਨੂੰ ਇੱਕ ਕੋਇਲ ਦੇ ਕਰੰਟ ਵਿੱਚ ਪ੍ਰਤੀਸ਼ਤ ਦੀ ਕਮੀ ਦੇ ਰੂਪ ਵਿੱਚ ਪੇਸ਼ ਕੀਤਾ ਜਾਵੇਗਾ ਜਦੋਂ ਬਾਰੰਬਾਰਤਾ ਦੁੱਗਣੀ ਹੋ ਜਾਂਦੀ ਹੈ, ਜਿਸ ਨੂੰ ਮੌਜੂਦਾ/ਫ੍ਰੀਕੁਐਂਸੀ ਰਿਸਪਾਂਸ ਟੈਸਟ ਵੀ ਕਿਹਾ ਜਾਂਦਾ ਹੈ। ਮੌਜੂਦਾ/ਫ੍ਰੀਕੁਐਂਸੀ ਪ੍ਰਤੀਕਿਰਿਆਵਾਂ ਸਰਕਟ ਦੀ ਸਮਰੱਥਾ ਵਿੱਚ ਤਬਦੀਲੀਆਂ ਦੁਆਰਾ ਪ੍ਰਭਾਵਿਤ ਹੁੰਦੀਆਂ ਹਨ ਕਿਉਂਕਿ ਬਾਰੰਬਾਰਤਾ ਵਧਦੀ ਹੈ।
g) IEEE Std 43-2000 ਦੇ ਤਹਿਤ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਤੀਰੋਧ ਟੈਸਟ ñ ਕਵਰ ਕੀਤੇ ਗਏ ਹਨ।
ਪ੍ਰਦਾਨ ਕੀਤੇ ਗਏ ਮਾਪਾਂ ਦੇ ਬਾਵਜੂਦ, ਮੁੱਖ ਉਦੇਸ਼ ਕੋਇਲਾਂ ਦੇ ਵਿਚਕਾਰ ਅਸੰਤੁਲਨ ਦੀ ਪਛਾਣ ਕਰਨਾ ਹੈ, ਜਿਵੇਂ ਕਿ ਤਿੰਨ-ਪੜਾਅ ਘੁੰਮਣ ਵਾਲੀ ਮਸ਼ੀਨ ਜਾਂ ਥ੍ਰੀ-ਫੇਜ਼ ਟ੍ਰਾਂਸਫਾਰਮਰ ਵਿੱਚ ਪੜਾਵਾਂ ਦੇ ਵਿਚਕਾਰ।
5.0 ਉਪਕਰਨ ਦਾ ਮੁਲਾਂਕਣ
5.1 ਤਿੰਨ-ਪੜਾਅ ਟ੍ਰਾਂਸਫਾਰਮਰਾਂ ਦਾ ਮੁਲਾਂਕਣ
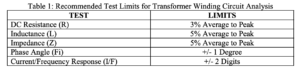
ਵਾਈਂਡਿੰਗ ਵਿਸ਼ਲੇਸ਼ਣ ਤਕਨੀਕਾਂ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹੋਏ ਤਿੰਨ-ਪੜਾਅ ਵਾਲੇ ਟ੍ਰਾਂਸਫਾਰਮਰਾਂ ‘ਤੇ ਟੈਸਟ ਕਰਦੇ ਸਮੇਂ, ਟੈਸਟ ਕੀਤੇ ਜਾ ਰਹੇ ਪਾਸੇ ਦੇ ਉਲਟ ਸਰਕਟ ਨੂੰ ਸ਼ਾਰਟ ਅਤੇ ਗਰਾਉਂਡ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ (IEEE Std 388- 1992: ਸੈਕਸ਼ਨ 5.6.1 ਇੰਡਕਸ਼ਨ ਬ੍ਰਿਜ ਮੇਥਡ ਆਫ਼ ਮਾਪ, IEEE Std 389-1996)। ਸੰਤੁਲਨ ਲਈ ਤਿੰਨ ਪੜਾਵਾਂ ਵਿੱਚੋਂ ਹਰੇਕ ਨੂੰ ਮਾਪਿਆ ਅਤੇ ਮੁਲਾਂਕਣ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਸਿਫ਼ਾਰਿਸ਼ ਕੀਤੇ ਟੈਸਟ ਨਤੀਜੇ ਸੀਮਾਵਾਂ ਲਈ ਸਾਰਣੀ 1 ਦੇਖੋ।
a) Fi ਅਤੇ I/F ਟੈਸਟ ਇਨਸੂਲੇਸ਼ਨ ਟੁੱਟਣ ਦਾ ਪਤਾ ਲਗਾਉਣਗੇ – ਇਨਸੂਲੇਸ਼ਨ ਸਿਸਟਮ ਸਰਕਟ ਸਮਰੱਥਾ ਅਤੇ ਪ੍ਰਤੀਰੋਧ ਵਿੱਚ ਤਬਦੀਲੀਆਂ।
b) ਇੰਡਕਟੈਂਸ ਅਤੇ ਇੰਪੀਡੈਂਸ ਮਾਪ ਅਡਵਾਂਸਡ ਵਾਈਡਿੰਗ ਨੁਕਸ ਦਾ ਪਤਾ ਲਗਾਉਣਗੇ ਅਤੇ ਨਿਰਮਾਣ ਜਾਂ ਮੁਰੰਮਤ ਵਿੱਚ ਨੁਕਸ ਬਦਲਣਗੇ।
c) ਪ੍ਰਤੀਰੋਧ ਦੀ ਵਰਤੋਂ ਢਿੱਲੇ ਕੁਨੈਕਸ਼ਨਾਂ, ਟੁੱਟੇ ਕੰਡਕਟਰਾਂ ਅਤੇ ਸੰਬੰਧਿਤ ਮੁੱਦਿਆਂ ਦਾ ਪਤਾ ਲਗਾਉਣ ਲਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
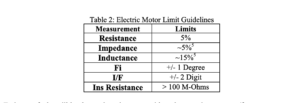
5.2 ਥ੍ਰੀ-ਫੇਜ਼ ਇੰਡਕਸ਼ਨ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਾਂ ਦਾ ਮੁਲਾਂਕਣ
ਵਿੰਡਿੰਗ ਸਰਕਟ ਵਿਸ਼ਲੇਸ਼ਣ ਤਕਨੀਕਾਂ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਸਟੇਟਰ ਅਤੇ ਰੋਟਰ ਦਾ ਵੱਖਰੇ ਤੌਰ ‘ਤੇ ਮੁਲਾਂਕਣ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਹੇਠਾਂ ਦਿੱਤੇ ਦਿਸ਼ਾ-ਨਿਰਦੇਸ਼ ਦੋਵਾਂ ਨੂੰ ਕਵਰ ਕਰਨਗੇ।
5.2.1 ਅਸੈਂਬਲਡ ਮੋਟਰ ਰੋਟਰ ਟੈਸਟਿੰਗ
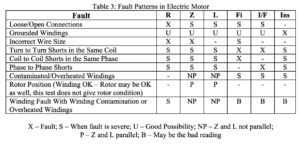
ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਰੋਟਰਾਂ ਵਿੱਚ ਆਮ ਨੁਕਸ ਦੀਆਂ ਕਿਸਮਾਂ ਹਨ:
a) ਏਅਰ ਗੈਪ (ਰੋਟਰ ਐਕਸੈਂਟ੍ਰਿਕਿਟੀ): ਜੋ ਆਮ ਤੌਰ ‘ਤੇ ਪ੍ਰਗਤੀਸ਼ੀਲ ਅਸਫਲਤਾ ਨਹੀਂ ਹੁੰਦਾ, ਜਦੋਂ ਤੱਕ ਕਿ ਰੋਟਰ ਵਿੱਚ ਢਿੱਲਾਪਣ ਨਹੀਂ ਹੁੰਦਾ, ਜਾਂ ਮੋਟਰ ਸ਼ਾਫਟ ਜਾਂ ਬੇਅਰਿੰਗਾਂ ਦੇ ਅੰਦਰ ਕੋਈ ਨੁਕਸ ਗੰਭੀਰ ਹੋ ਜਾਂਦਾ ਹੈ। ਵਾਈਬ੍ਰੇਸ਼ਨ ਵਿਸ਼ਲੇਸ਼ਣ ਤਕਨੀਕਾਂ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਢਿੱਲੇਪਣ, ਬੇਅਰਿੰਗਾਂ ਅਤੇ ਮੋਟਰ ਸ਼ਾਫਟ ਦੀਆਂ ਸਮੱਸਿਆਵਾਂ ਨੂੰ ਤੇਜ਼ੀ ਨਾਲ ਅਤੇ ਸੁਰੱਖਿਅਤ ਢੰਗ ਨਾਲ ਖੋਜਿਆ ਜਾ ਸਕਦਾ ਹੈ। ਨਿਰਮਾਣ ਅਤੇ ਮੁਰੰਮਤ ਏਅਰ ਗੈਪ ਦੇ ਮੁੱਦਿਆਂ ਨੂੰ ਸਵੀਕ੍ਰਿਤੀ ਟੈਸਟਿੰਗ ਦੌਰਾਨ ਜਾਂ ਨਿਰਮਾਤਾ/ਮੁਰੰਮਤ ਦੀ ਦੁਕਾਨ ‘ਤੇ ਸਾਜ਼ੋ-ਸਾਮਾਨ ਨੂੰ ਸਥਾਪਿਤ ਕਰਨ ਦੇ ਸਮੇਂ ਤੋਂ ਪਹਿਲਾਂ ਸਥਿਰ ਵਾਇਨਿੰਗ ਸਰਕਟ ਵਿਸ਼ਲੇਸ਼ਣ ਨਾਲ ਖੋਜਿਆ ਜਾ ਸਕਦਾ ਹੈ। ਇਸ ਕਿਸਮ ਦੀ ਸਵੀਕ੍ਰਿਤੀ ਜਾਂਚ ਦੀ ਵਰਤੋਂ ਇਹ ਨਿਰਧਾਰਤ ਕਰਨ ਲਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ ਕਿ ਕੀ ਏਅਰ ਗੈਪ ਸਹੀ ਢੰਗ ਨਾਲ ਸੈੱਟ ਕੀਤਾ ਗਿਆ ਹੈ (ਇੰਸਟਾਲੇਸ਼ਨ ਦੌਰਾਨ ਰੋਟਰ ਦੇ ਕਿਸੇ ਵੀ ਸਿਰੇ ‘ਤੇ ਲਏ ਗਏ ਔਸਤ ਏਅਰਗੈਪ ਰੀਡਿੰਗ ਦਾ +/- 10%)।
b) ਕਾਸਟਿੰਗ ਵੋਇਡਸ ਅਤੇ ਰੋਟਰ ਬਾਰ ਕਨੈਕਸ਼ਨ: ਜੋ ਸਮੇਂ ਦੇ ਨਾਲ ‘ਟੁੱਟੇ ਰੋਟਰ ਬਾਰੀ ਨੁਕਸ’ ਵੱਲ ਵਧ ਸਕਦੇ ਹਨ। ਕਾਸਟ ਐਲੂਮੀਨੀਅਮ ਰੋਟਰਾਂ ਵਿੱਚ ਹਮੇਸ਼ਾ ਕਾਸਟਿੰਗ ਵੋਇਡਸ ਹੁੰਦੇ ਹਨ, ਐਲੂਮੀਨੀਅਮ ਅਲੌਏ ਵਿੱਚ ਭਿੰਨਤਾਵਾਂ ਅਤੇ ਤਾਂਬੇ ਦੇ ਮਿਸ਼ਰਤ ਬਾਰਾਂ ਦੇ ਜੋੜਾਂ ਵਿੱਚ ਭਿੰਨਤਾਵਾਂ ਜੋ ਇੰਡਕਟੈਂਸ ਨੂੰ ਪ੍ਰਭਾਵਤ ਕਰਦੀਆਂ ਹਨ। ਨੁਕਸ ਸਰਕਟ ਇੰਡਕਟੈਂਸ ਜਾਂ ਇੰਪੀਡੈਂਸ ਰੀਡਿੰਗ ਦੀ ਇੱਕ ਲੜੀ ਲੈ ਕੇ ਖੋਜੇ ਜਾ ਸਕਦੇ ਹਨ ਕਿਉਂਕਿ ਸ਼ਾਫਟ ਨੂੰ 360 ਡਿਗਰੀ ਘੁੰਮਾਇਆ ਜਾਂਦਾ ਹੈ। ਇਹਨਾਂ ਰੀਡਿੰਗਾਂ ਨੂੰ ਵੇਵਫਾਰਮ ਦੇ ਰੂਪ ਵਿੱਚ ਗ੍ਰਾਫ਼ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ ਅਤੇ ਵੇਵਫਾਰਮ ਦੇ ਇੰਡਕਟੈਂਸ ਅਤੇ/ਜਾਂ ਪ੍ਰਤੀਰੋਧ ਤਬਦੀਲੀਆਂ ਦੀ ਸਥਿਤੀ ਨੂੰ ਦੇਖ ਕੇ ਨੁਕਸ ਲਈ ਦੇਖਿਆ ਜਾ ਸਕਦਾ ਹੈ। ਵੇਵਫਾਰਮ ਦੇ ਝੁਕਾਅ ਜਾਂ ਢਲਾਨ ‘ਤੇ ਇੱਕ ਛੋਟੀ ਜਿਹੀ ਤਬਦੀਲੀ ਇੱਕ ਛੋਟੀ, ਆਮ ਤੌਰ ‘ਤੇ ਗੈਰ-ਦਖਲਅੰਦਾਜ਼ੀ ਨੁਕਸ ਨੂੰ ਦਰਸਾਉਂਦੀ ਹੈ, ਜਦੋਂ ਕਿ ਵੇਵਫਾਰਮ ਦੇ ਸਿਖਰ ‘ਤੇ ਇੱਕ ਮਹੱਤਵਪੂਰਨ ਤਬਦੀਲੀ ਰੋਟਰ ਦੇ ਗੰਭੀਰ ਨੁਕਸ ਨੂੰ ਦਰਸਾਉਂਦੀ ਹੈ। ਗੰਭੀਰ ਨੁਕਸ ਮੋਟਰ ਦੇ ਓਪਰੇਟਿੰਗ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਵਿੱਚ ਦਖਲ ਦੇ ਸਕਦੇ ਹਨ।
c) ਟੁੱਟੀਆਂ ਰੋਟਰ ਬਾਰਾਂ: ਇਹ ਪ੍ਰਗਤੀਸ਼ੀਲ ਨੁਕਸ ਹਨ ਜੋ ਆਮ ਤੌਰ ‘ਤੇ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਦੇ ਗਲਤ ਸੰਚਾਲਨ ਕਾਰਨ ਹੁੰਦੇ ਹਨ। ਜਿਵੇਂ ਹੀ ਇੱਕ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਚਾਲੂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਉੱਚ ਕਰੰਟ ਅਤੇ ਉੱਚ ਬਾਰੰਬਾਰਤਾ ਦੇ ਕਾਰਨ ਰੋਟਰ ਵਿੱਚ ਗਰਮੀ ਪੈਦਾ ਹੁੰਦੀ ਹੈ, ਜਿਸ ਲਈ ਇੱਕ ਠੰਡਾ-ਡਾਊਨ ਪੀਰੀਅਡ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ। ਦੂਜੇ ਮਾਮਲਿਆਂ ਵਿੱਚ, ਇੱਕ ਰੋਟਰ ਰੁਕਿਆ ਹੋ ਸਕਦਾ ਹੈ, ਜਿਸ ਨਾਲ ਉੱਚ ਕਰੰਟ ਅਤੇ ਉੱਚ ਰੋਟਰ ਫ੍ਰੀਕੁਐਂਸੀ ਹੋ ਸਕਦੀ ਹੈ। ਤਾਂਬੇ ਦੇ ਮਿਸ਼ਰਤ ਮਿਸ਼ਰਣਾਂ (ਜਾਂ ਐਲੂਮੀਨੀਅਮ) ਅਤੇ ਰੋਟਰ ਸਮੱਗਰੀਆਂ ਦੀ ਵਿਸਤਾਰ ਦਰ ਵੱਖਰੀ ਹੁੰਦੀ ਹੈ, ਜੋ ਬਾਰਾਂ ‘ਤੇ ਮਕੈਨੀਕਲ ਦਬਾਅ ਪਾਉਂਦੀਆਂ ਹਨ। ਬਹੁਤ ਜ਼ਿਆਦਾ ਤਣਾਅ ਦੇ ਤਹਿਤ, ਰੋਟਰ ਬਾਰਾਂ ਕ੍ਰੈਕ ਹੋ ਸਕਦੀਆਂ ਹਨ, ਜਿਸ ਨਾਲ ਮੋਟਰ ਦੀ ਟਾਰਕ ਪੈਦਾ ਕਰਨ ਦੀ ਸਮਰੱਥਾ ਘਟ ਜਾਂਦੀ ਹੈ। ਰੋਟਰ ਬਾਰਾਂ ਦੇ ਫ੍ਰੈਕਚਰ ਦੇ ਰੂਪ ਵਿੱਚ, ਆਲੇ ਦੁਆਲੇ ਦੀਆਂ ਰੋਟਰ ਬਾਰਾਂ ਵਾਧੂ ਕਰੰਟ ਲੈਂਦੀਆਂ ਹਨ, ਜਿਸ ਨਾਲ ਰੋਟਰ ਬਾਰ ਦੇ ਤਾਪਮਾਨ ਵਿੱਚ ਹੋਰ ਵਾਧਾ ਹੁੰਦਾ ਹੈ ਅਤੇ ਵਾਧੂ ਚੀਰ ਆਉਣ ਦੀ ਸੰਭਾਵਨਾ ਹੁੰਦੀ ਹੈ।
ਇੰਡਕਟੈਂਸ ਅਤੇ ਅੜਿੱਕਾ ਦੁਆਰਾ ਨੁਕਸ ਦਾ ਪਤਾ ਲਗਾਉਣ ਲਈ ਟੈਸਟ ਉਪਕਰਣਾਂ ਦੀ ਸਮਰੱਥਾ ਰੋਟਰ ਸਥਿਤੀ ਦੇ ਬਦਲਣ ਦੇ ਨਾਲ ਸਰਕਟ ਦੇ ਆਪਸੀ ਇੰਡਕਟੈਂਸ ਵਿੱਚ ਤਬਦੀਲੀਆਂ ਕਾਰਨ ਹੁੰਦੀ ਹੈ। ਜਿਵੇਂ ਕਿ ਇੱਕ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਇੱਕ ਰੋਟੇਟਿੰਗ ਸੈਕੰਡਰੀ ਸਰਕਟ ਵਾਲਾ ਇੱਕ ਟ੍ਰਾਂਸਫਾਰਮਰ ਹੁੰਦਾ ਹੈ, ਜਦੋਂ ਰੋਟਰ ਪੋਜੀਸ਼ਨ ਪ੍ਰਭਾਵੀ ਪ੍ਰਾਇਮਰੀ (ਸਟੇਟਰ ਵਿੰਡਿੰਗਜ਼) ਨੂੰ ਸੈਕੰਡਰੀ (ਰੋਟਰ ਵਿੰਡਿੰਗਜ਼) ਅਨੁਪਾਤ ਵਿੱਚ ਬਦਲਦੀ ਹੈ ਅਤੇ ਸਮੁੱਚੀ ਆਪਸੀ ਇੰਡਕਟੈਂਸ ਅਤੇ ਨਤੀਜੇ ਵਜੋਂ ਸਰਕਟ ਪ੍ਰਤੀਰੋਧ ਬਦਲਦੀ ਹੈ। ਘੁੰਮਣ ਵਾਲੇ ਸਾਜ਼-ਸਾਮਾਨ ਦੀ ਪ੍ਰਕਿਰਤੀ ਦੇ ਕਾਰਨ, ਸਮੇਂ ਦੇ ਨਾਲ ਬਦਲਾਅ ਸਾਈਨਸੌਇਡਲ (ਜਾਂ ਕੁਝ ਪਰਿਵਰਤਨ) ਅਤੇ ਸਮਮਿਤੀ ਹੋਣਗੇ।
ਰੋਟਰ ਇੰਡਕਟੈਂਸ ਜਾਂ ਇੰਪੀਡੈਂਸ ਟੈਸਟ ਕਰਨ ਲਈ ਆਮ ਪ੍ਰਕਿਰਿਆ 360 ਡਿਗਰੀ ਰੋਟੇਸ਼ਨ ਦੁਆਰਾ, ਜਾਂ ਇੱਕ ਰੀਅਲ-ਟਾਈਮ ਇੰਡਕਟੈਂਸ ਜਾਂ ਇਮਪੀਡੈਂਸ ਅਧਾਰਤ ਟੈਸਟ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਇੰਡਕਟੈਂਸ ਜਾਂ ਇੰਪੀਡੈਂਸ ਰੀਡਿੰਗਾਂ ਨੂੰ ਵੀ ਵਧਾਉਣਾ ਹੈ। ਵਿਆਖਿਆ ਲਈ ਟੈਸਟ ਦੇ ਨਤੀਜੇ ਗ੍ਰਾਫ ਕੀਤੇ ਜਾਣੇ ਚਾਹੀਦੇ ਹਨ।
5.2.2 ਅਸੈਂਬਲਡ ਰੋਟੇਟਿੰਗ ਉਪਕਰਨ ਸਟੇਟਰ ਟੈਸਟਿੰਗ
ਅਸੈਂਬਲਡ ਰੋਟੇਟਿੰਗ ਉਪਕਰਣ ਟੈਸਟ ਦੇ ਨਤੀਜਿਆਂ ਦਾ ਮੁਲਾਂਕਣ ਨੁਕਸ ਖੋਜਣ ਦੀ ਸ਼ੁੱਧਤਾ ਦੀਆਂ ਵੱਖ-ਵੱਖ ਡਿਗਰੀਆਂ ਪ੍ਰਦਾਨ ਕਰੇਗਾ। ਉਦਾਹਰਨ ਲਈ, ਇੰਡਕਟੈਂਸ ਟੈਸਟ ਦੇ ਨਤੀਜੇ ਉੱਚ ਅਤੇ ਵੱਖੋ ਵੱਖਰੀਆਂ ਡਿਗਰੀਆਂ ਪ੍ਰਦਾਨ ਕਰਨਗੇ ਕਿਉਂਕਿ ਰੋਟਰ ਨੂੰ ਵੱਖ-ਵੱਖ ਸਥਿਤੀਆਂ ਵਿੱਚ ਰੱਖਿਆ ਗਿਆ ਹੈ, ਇਸਲਈ ਰੋਟਰ ਸਥਿਤੀ ਨੂੰ ਐਡਜਸਟ ਕੀਤਾ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ ਤਾਂ ਜੋ ਪ੍ਰਾਇਮਰੀ (ਸਟੇਟਰ) ਅਤੇ ਸੈਕੰਡਰੀ (ਰੋਟਰ) ਵਿੰਡਿੰਗ ਵਿਚਕਾਰ ਆਪਸੀ ਇੰਡਕਟੈਂਸ ਦੇ ਮੁੱਲ ਮੁਕਾਬਲਤਨ ਇੱਕੋ ਜਿਹੇ ਹਨ। ਹਾਲਾਂਕਿ, ਇੰਡਕਟੈਂਸ ਦੇ ਨਾਲ ਅੜਿੱਕਾ, ਇਨਸੂਲੇਸ਼ਨ ਟੁੱਟਣ ਜਾਂ ਵਿੰਡਿੰਗ ਦੇ ਗੰਦਗੀ ਦੇ ਕੈਪੇਸਿਟਿਵ ਪ੍ਰਭਾਵ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ। ਉਦਾਹਰਨ ਲਈ, ਜੇਕਰ ਇਮਪੀਡੈਂਸ ਅਤੇ ਇੰਡਕਟੈਂਸ ਮੁਕਾਬਲਤਨ ਸਮਾਨਾਂਤਰ ਹਨ, ਤਾਂ ਪੜਾਅ ਅਸੰਤੁਲਨ ਰੋਟਰ ਸਥਿਤੀ ਦੇ ਕਾਰਨ ਹੋਵੇਗਾ। ਜੇਕਰ ਘੱਟੋ-ਘੱਟ ਇੱਕ ਪੜਾਅ ਦੀ ਰੁਕਾਵਟ ਵਿੱਚ ਕਮੀ ਹੈ, ਜਾਂ ਅੜਿੱਕਾ ਅਤੇ ਇੰਡਕਟੈਂਸ ਮੁਕਾਬਲਤਨ ਸਮਾਨਾਂਤਰ ਨਹੀਂ ਹਨ, ਤਾਂ ਸਰਕਟ ਕੈਪੈਸੀਟੈਂਸ ਬਦਲ ਗਿਆ ਹੈ ਜੋ ਸੰਭਾਵਤ ਹਵਾ ਦੇ ਗੰਦਗੀ ਜਾਂ ਇਨਸੂਲੇਸ਼ਨ ਟੁੱਟਣ ਨੂੰ ਦਰਸਾਉਂਦਾ ਹੈ।
ਰੀਡਿੰਗ ਵਿੱਚ ਇੱਕ ‘ਸ਼ਿਫਟ’ ਦੇ ਤੌਰ ‘ਤੇ ਫੇਜ਼ ਐਂਗਲ ਜਾਂ ਮੌਜੂਦਾ/ਫ੍ਰੀਕੁਐਂਸੀ ਪ੍ਰਤੀਕਿਰਿਆ ਵਿੱਚ ਤਬਦੀਲੀਆਂ ਦੇ ਰੂਪ ਵਿੱਚ ਸ਼ੁਰੂਆਤੀ ਮੋੜ ਦੇ ਨੁਕਸ ਖੋਜੇ ਜਾਣਗੇ। ਇੱਕ ਸ਼ਿਫਟ ਨੂੰ ਦਰਸਾਇਆ ਜਾ ਸਕਦਾ ਹੈ, ਉਦਾਹਰਨ ਲਈ, Fi: 77/76/77 ਅਤੇ/ਜਾਂ I/F: -44/-46/- 44।
5 ਪ੍ਰਤੀਰੋਧ ਅਤੇ ਪ੍ਰਤੀਰੋਧ ਅਸੰਤੁਲਨ ਰੀਡਿੰਗ ਸਿਰਫ ਤਾਂ ਹੀ ਗਿਣੀ ਜਾ ਸਕਦੀ ਹੈ ਜੇਕਰ ਰੋਟਰ ਸਥਿਤੀ ਦਾ ਹਿਸਾਬ ਲਗਾਇਆ ਜਾਂਦਾ ਹੈ। ਰੀਡਿੰਗਾਂ ਨੂੰ ਰੋਟਰ ਸਥਿਤੀ ਦੇ ਬਦਲਾਅ ਤੋਂ ਸਾਈਨ ਵੇਵ ਦੀ ਇੱਕ ਸਿਖਰ ਜਾਂ ਘਾਟੀ ‘ਤੇ ਲਿਆ ਜਾਣਾ ਚਾਹੀਦਾ ਹੈ।
6.0 ਬਿਬਲੀਓਗ੍ਰਾਫੀ
a) IEEE Std 43-2000: IEEE ਦੁਆਰਾ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਰੀ ਦੇ ਇਨਸੂਲੇਸ਼ਨ ਪ੍ਰਤੀਰੋਧ ਦੀ ਜਾਂਚ ਕਰਨ ਲਈ ਸਿਫ਼ਾਰਸ਼ੀ ਅਭਿਆਸ
b) IEEE Std 56-1977: ਵੱਡੀ ਅਲਟਰਨੇਟਿੰਗ ਕਰੰਟ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਰੀ (10,000 kVA ਅਤੇ ਵੱਡੀ) ਦੇ ਇਨਸੂਲੇਸ਼ਨ ਮੇਨਟੇਨੈਂਸ ਲਈ IEEE ਗਾਈਡ
c) IEEE Std 118-1978: ਵਿਰੋਧ ਮਾਪਾਂ ਲਈ IEEE ਸਟੈਂਡਰਡ ਟੈਸਟ ਕੋਡ
d) IEEE Std 120-1989: ਪਾਵਰ ਸਰਕਟਾਂ ਵਿੱਚ ਇਲੈਕਟ੍ਰੀਕਲ ਮਾਪਾਂ ਲਈ IEEE ਮਾਸਟਰ ਟੈਸਟ ਗਾਈਡ
e) IEEE Std 388-1992: ਇਲੈਕਟ੍ਰਾਨਿਕ ਪਾਵਰ ਪਰਿਵਰਤਨ ਉਪਕਰਣ ਵਿੱਚ ਟ੍ਰਾਂਸਫਾਰਮਰਾਂ ਅਤੇ ਇੰਡਕਟਰਾਂ ਲਈ IEEE ਸਟੈਂਡਰਡ
f) IEEE Std 389-1996: IEEE ਨੇ ਇਲੈਕਟ੍ਰਾਨਿਕਸ ਟ੍ਰਾਂਸਫਾਰਮਰਾਂ ਅਤੇ ਇੰਡਕਟਰਾਂ ਦੀ ਜਾਂਚ ਲਈ ਸਿਫ਼ਾਰਿਸ਼ ਕੀਤੀ ਅਭਿਆਸ
g) IEEE Std 1068-1990: IEEE ਨੇ ਪੈਟਰੋਲੀਅਮ ਅਤੇ ਰਸਾਇਣਕ ਉਦਯੋਗ ਲਈ ਮੋਟਰਾਂ ਦੀ ਮੁਰੰਮਤ ਅਤੇ ਰੀਵਾਇੰਡਿੰਗ ਲਈ ਸਿਫ਼ਾਰਸ਼ ਕੀਤੇ ਅਭਿਆਸ
h) ਪੇਨਰੋਜ਼, ਡਾ. ਹਾਵਰਡ ਡਬਲਯੂ., ਮੋਟਰ ਸਰਕਟ ਵਿਸ਼ਲੇਸ਼ਣ: ਥਿਊਰੀ, ਐਪਲੀਕੇਸ਼ਨ ਅਤੇ ਐਨਰਜੀ ਐਨਾਲਿਸਿਸ, ਡਿਜ਼ਾਇਨ ਦੁਆਰਾ ਸਫਲਤਾ, 2001
i) ਫਿੰਕ, ਡੌਨਲਡ ਅਤੇ ਬੀਟੀ, ਐਚ. ਵੇਨ, ਇਲੈਕਟ੍ਰੀਕਲ ਇੰਜੀਨੀਅਰਾਂ ਲਈ ਸਟੈਂਡਰਡ ਹੈਂਡਬੁੱਕ, ਚੌਦ੍ਹਵਾਂ ਐਡੀਸ਼ਨ, ਮੈਕਗ੍ਰਾ-ਹਿੱਲ, 2000।
j) ਸਰਮਾ, ਮੁਲੁਕੁਟਲ, ਇਲੈਕਟ੍ਰਿਕ ਮਸ਼ੀਨਾਂ: ਸਟੀਡੀ-ਸਟੇਟ ਥਿਊਰੀ ਅਤੇ ਡਾਇਨਾਮਿਕ ਪਰਫਾਰਮੈਂਸ, ਦੂਜਾ ਐਡੀਸ਼ਨ, ਪੀਡਬਲਯੂਐਸ ਪਬਲਿਸ਼ਿੰਗ ਕੰਪਨੀ, 1996
k) ਮਜ਼ੂਰ, ਗਲੇਨ ਅਤੇ ਪ੍ਰੋਕਟਰ, ਥਾਮਸ, ਟ੍ਰਬਲਸ਼ੂਟਿੰਗ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰਜ਼, ਦੂਜਾ ਐਡੀਸ਼ਨ, ਏਟੀਪੀ ਪਬਲਿਸ਼ਿੰਗ, 1997
l) ਨਾਸਰ, ਸਈਅਦ, ਇਲੈਕਟ੍ਰਿਕ ਮਸ਼ੀਨਾਂ ਅਤੇ ਇਲੈਕਟ੍ਰੋਮੈਗਨੈਟਿਕਸ, ਮੈਕਗ੍ਰਾ-ਹਿੱਲ, 1981

AT34™
ਜ਼ਮੀਨੀ ਨੁਕਸ, ਅੰਦਰੂਨੀ ਵਾਈਡਿੰਗ ਨੁਕਸ, ਖੁੱਲ੍ਹੇ ਕੁਨੈਕਸ਼ਨ, ਅਤੇ ਗੰਦਗੀ ਲਈ ਮੋਟਰ ਕੰਪੋਨੈਂਟ ਦੀ ਇਕਸਾਰਤਾ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰੋ ਅਤੇ ਰੁਝਾਨ ਦਿਓ – ਸਭ ਕੁਝ ਇੱਕ ਹੱਥ ਨਾਲ ਫੜੇ ਗਏ ਉਪਕਰਣ ਨਾਲ।