回転機械試験ガイドライン
1.概要
1.1 スコープ
本書は、1馬力(746ワット)以上の定格を持つ回転機器の電機子巻線と界磁巻線について、巻線ショート、位相アンバランス、ローターバーを評価するためのガイドラインを記述したものである。 誘導機と変圧器に適用される。
この文書では、典型的な静的巻線回路解析測定と、これらの測定値がどのように機械の状態を示すかについて説明している。 回路測定の限界に関するガイドラインを提供する。
検討された測定の種類は、抵抗、インピーダンス、インダクタンス、キャパシタンスなどの基本的な巻線回路測定や特殊なテスト測定を提供する個々の、または測定器のコレクションによって提供されます。 測定技術には以下のものが含まれる(参考:IEEE Std 120-1989):
a) 直流抵抗測定は,直流電流値を使用する。
b) インダクタンス及びインピーダンスなどの交流測定は,計器製造事業者が選択した正弦波測定による交流 とする。
c) すべての測定値はブリッジ回路を通して評価され、そのブリッジの範囲内で報告される。 インダクタンスやインピーダンスなどの標準的な工学的測定単位は、値が比、度、パーセンテージで示される場合を除き、計算してはならない。
本ガイドラインの最初の草案が作成された時点では、地中壁絶縁測定を除くすべての試験結果を提供する出力電圧は電子レンジにあり、通常はAC/DC10ボルト未満である。 これらの測定器の標準出力周波数も、一般に100Hz以上である。 健全な工学的原則に基づき、これらの値を超える計測器が開発された場合、またはモータ回路を正確に把握するための追加値が提供された場合、それらは本ガイドラインの範囲に含めることができる。
1.2 目的
本ガイドラインの目的は、巻線回路解析を用いて収集した方法と一般的なデータを概説し、 ターン間絶縁、接地壁絶縁、リスケージ型ローターの評価の両方について、結果の解釈の指針を示すことである。 接地壁絶縁測定方法および試験結果は、IEEE 規格 43「回転機械の絶縁抵抗試験のための IEEE 推奨実施方法」の最新版を参照すること。
a) 回転機械及び変圧器の状態を評価するために使用できる試験結果の一様な組み合わせを推奨する。
b) 誘導ロータ回路測定の測定方法及び結果の解釈に関する一般的指針を提供する。
c) ターン間絶縁,接地壁絶縁及びその他の回転機械の故障の種類を決定するために使用される測定の種類を定義する。
2.参考文献
以下は、この規格に関連する参考文献である。
a) IEEE Std 43-2000:回転機械の絶縁抵抗試験に関する IEEE 推奨実施法
b) IEEE 規格 56-1977:大型交流回転機械(10,000 kVA 以上)の絶縁維持のための IEEE ガイド
c) IEEE Std 118(1978年):抵抗測定のためのIEEE標準テストコード
d) IEEE Std 120-1989: 電力回路の電気測定に関する IEEE マスターテストガイド
e) IEEE Std 388 ñ 1992:電子電力変換装置におけるトランス及びインダクタに関する IEEE 規格
f) IEEE Std 389ñ 1996:電子機器用変圧器及びインダクタの試験に関する IEEE 推奨実施方法
g) IEEE Std 1068(1990年):石油・化学産業用モーターの修理および巻戻しのためのIEEE推奨慣行
3.安全への配慮
静的巻線回路解析」という用語は、無通電機器で実施される試験方法として定義される。 使用される計器は、UL、CE、CSA、または同等のものなど、何らかの認められた認証に従わなければならない。 このガイドラインですべての安全面をカバーすることは不可能である。 試験担当者は、メーカーの取扱説明書、組合、会社、政府の規則を参照すること。
4.巻線回路解析 一般理論
4.1 磁気回路
電気コイルと電気機械は、結合された電磁回路の組み合わせでできている。 磁気回路は、電流が導体を通過し、磁性材料に導かれることで形成される。
まず、電流Iを流しながら磁石の極に直角に置かれた長さlの導体を考える。 Bは磁束密度の大きさ(単位はテスラ(T))、磁束は磁気の強さの測定値である。 その結果、式は次のようになる:
フォーミュラ1力(ニュートン)
F = BI l
導体の任意の位置に基づいて、lは電流の方向に大きさlのベクトルである。
式2:任意の導体位置による力
F = Il x B
Bが面積Aに対して一定の大きさであると仮定する:
式3:磁束(Φ、ウェバー)
Φ=BAまたはB=Φ/A
Bはウェバー(Wb)/mで表される。
IとBの関係は以下の通り:
式4:アンペール回路法則
A/m *d*l = I
ここでA/mは磁場強度H
コイルのように閉回路にN回の電流を流すと、起磁力(mmfまたはℑ)は次のようになる:
数式5:MMF
ℑ = NI
NIはアンペアターン(At)とも呼ばれる。 Nを1回転と呼ぶ。
インダクタンス(L)は、ヘンリー(H)単位で示される単位電流あたりの磁束のつながりとして定義される1。
式6:インダクタンス
L = (NΦ)/I
ëní個の異なるコイルで巻かれたトロイダルの場合、インダクタンスを定義することができる:
数式7:トロイダル磁場1
Lpq = (Np(kpqΦq))/iq
インダクタンスに蓄えられるエネルギーは、電流(i)を流して計算することができる:
式8:誘導エネルギー
W = (1/2)Li 2
周波数は導体内の電界に影響を与える。印加する周波数が高くなると、電流とその結果生じる磁場は導体の表面に近づく(表皮効果)。これは、交番磁束が存在する導体には誘導起電力が存在するという事実によるものです。これらの起電力は中心部の方が周縁部よりも大きいため、電位差は中心部では電流に逆らい、周縁部では電流を助ける電流を確立する傾向がある。こうして電流は導体の外側に押しやられ、導体の有効面積が減少する。
1 電気機械と電気力学, Syed A Nasar, Schaumís Outline Series, 1981
2 Standard Handbook for Electrical Engineers, Fourteenth Edition, Donald G Fink, Wayne Beaty, McGraw Hill, 2000.
4.2 断熱システム
「電気絶縁とは、異なる電位にある導体の間に置かれたとき、印加された電圧と同位相のごくわずかな電流しか流れない媒体または材料のことである。誘電体という用語は、電気絶縁とほぼ同義であり、誘電体を応用したものと考えることができる。完全な誘電体は、導体間に伝導電流を流さず、容量性充電電流のみを流します2(IEEE Std 120-1989, Section 5.4.2も参照)。
誘電体の最も単純な回路表現は、並列抵抗とコンデンサーである。 真空中の)導体間のキャパシタンスは0.0884 x 10-12 A/tである。ここでAは導体の面積(平方センチメートル)、tは導体の間隔(センチメートル)である。 「電極間の容積を誘電体材料で満たすと、材料の分子や原子内の電荷によって静電容量が大きくなり、同じ印加電圧でより多くの電荷がコンデンサ面に引き寄せられる。電極間に誘電体がある場合の静電容量は”3
式9:平行円形導体間の静電容量
C = (2π∈í∈oL)/cosh-1(D/2r)
絶縁システムの誘電率は、イオン界面分極や分子双極子分極と同様に、印加周波数の増加とともに下方(分散領域)に減少する。 ポリマーでは、双極子分散は非常に低い周波数で起こる。
4.3 絶縁破壊
本ガイドラインでは絶縁破壊を「故障」と呼び、汚染、アークトラッキング、熱老化、機械的故障を含む。 各タイプの故障には共通の要因がある:電気絶縁の抵抗特性と容量特性が変化する。
汚染、特に水の浸入は、絶縁の導電性を増加させる。 水は断熱材の亀裂や断熱システム内の介在物に集まる傾向がある。 電界は、膨張を含む汚染物質の変化を引き起こし、絶縁システムをさらに破壊する。 ガス、蒸気、ほこりなどを含むその他の汚染物質は、断熱システムの化学的構成を攻撃する可能性がある。 絶縁システムが完全にブリッジされると、システムは短絡したとみなされる。 これは通常、絶縁システムが最も弱い導体間で最初に発生する。 主な故障箇所には、回転機械のエンドターン(巻線の電気的応力が最も高い箇所でもある)のようなコイルの非固定部分や、回転機械のスロットからコイルが離れる箇所のような機械的応力が最も高い箇所がある。
絶縁システムのアークトラッキングは、絶縁システムの表面で導体間に大電流が流れる場合に発生する。 これらの箇所の絶縁体が炭化し、電気絶縁システムの容量成分と抵抗成分が変化する。 アークトラッキングは多くの場合強い電気的ストレス、汚染、またはその両方。 このタイプの故障は主に導体またはコイル間で発生し、通常は短絡で終わる。
絶縁システムの熱老化は、電気絶縁システムがアレニウス化学方程式の結果として劣化することで発生する。 一般的に受け入れられている経験則では、使用温度が10℃上昇するごとに断熱システムの熱的寿命は半分になる。 断熱材は、断熱システムの限界温度に達すると、すぐに劣化して炭化する。
その他の環境要因も絶縁システムの熱寿命に影響を与えます:巻線汚染、湿気、電気分解、その他の電気的ストレス。
電気絶縁システムの機械的欠陥には、応力亀裂、振動、機械的侵入、機械的故障などがある。 様々な作業中にコイル内に力が加わると、機械的な動きが生じ、絶縁材が破断する可能性がある。 電気的・機械的振動は、絶縁システムに過度のストレスを与え、その結果、絶縁システムの応力破壊やゆるみを引き起こす。 機械的侵入には、導体間および/または絶縁システムからアースへの絶縁システムへの物質の移動が含まれる。 機械的な故障には、回転機械のベアリングの故障のような、ベアリングがばらばらになってシステムの可動部品を通過するような故障が含まれる。 これらの故障は、導体間の短絡、コイル間の短絡、あるいはコイルからアースへの短絡として終わる可能性がある。
4.4 巻線絶縁不良の段階
巻線故障の主な原因は以下の通りです:絶縁(熱)破壊、汚染、水分の浸入、過渡現象、機械的ストレスなどがあり、最初に同じコイル内の導体間、同じ位相のコイル間、または別々の位相のコイル間の絶縁破壊が起こります。 このような巻線のëショートは、巻線が実際に故障したときに絶縁抵抗の故障として終わることがあるが、必ずしもそうではない。 導体間の変化を検出することで、機器の動作が停止する前に、早期の修理や交換ができる可能性が高まります。 フォルトの発生率は、フォルトの重大度(すなわち、巻数比)と導体間の電位に依存することに注意してください(例えば、フォルトは600 VAC以下の機器では傾向的に発生し、1000 VACを超えるシステムでは急速に故障する可能性があります)。
導体間の巻線故障の一般的な段階は以下の通りである:
– ステージ1:導体間の絶縁にストレスがかかり、故障箇所の絶縁の抵抗値と容量値に変化が生じる。 高温や同様の反応性故障は、その箇所の絶縁体(誘電体)の炭化をもたらす。 炭化は、断熱システム全体のトラッキングによっても起こる可能性がある。
– 第2段階:障害点がより抵抗的になる。 巻線の「良い」部分(およびシステムの他の通電コンポーネント)と短絡ターンとの間に相互インダクタンスが発生する。 I2 R損失は、短絡ターン内の電流の増加により故障箇所で増加し、その箇所の温度を上昇させ、絶縁システムが急速に炭化する原因となる。 モーターはこの時点でトリップし始めるかもしれないが、しばらく冷却すれば運転できるようになるかもしれない。
– 第3段階:絶縁が破壊され、ショートのポイント内のエネルギーによって絶縁システムが爆発的に破裂し、巻線が気化する。
4.5 機器の比較
回転機械と変圧器は同様の原理で作動する。 例えば、三相誘導モーターには、変圧器の一次巻線と二次巻線と同じように、一次巻線(固定子巻線)と二次巻線(回転子巻線)の回路がある。 違いは、電気エネルギーが変圧器によって異なる値の電気エネルギーに変換されることである。 同じ電気エネルギーを電気モーターを使って機械エネルギーに変換する。
トランスの巻線は、一般的に相間でバランスが取れるように設計されている。 これにより、二次側でバランスの取れたエネルギーが得られ、システム全体でバランスの取れた回路インピーダンスが得られる。 三相回転機械(組立て式)は、ロータの位置が変わると相互インダクタンスが変化する。 その結果、3相すべてがテストされている間、ローターが1つの位置にあり、テストされた誘導性アンバランスと、その結果生じるインピーダンスのアンバランスが生じる可能性がある。 回転機械の巻線のアンバランスは、ローターの位置を補正するか、インピーダンスとインダクタンスの測定値を比較することで評価できる。
4.6 評価のための試験測定
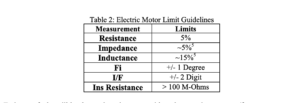
変圧器や回転機械の巻線を評価するための基本的な電気測定には、以下のようなものがある:
a) 抵抗 (IEEE Std 118-1978, IEEE Std 389-1996) ワイヤーサイズ、接続、オープン/高抵抗回路のばらつきを検出するために使用される。
b) インダクタンス(IEEE Std 388-1992:Section 5.2 インダクタンス(インピーダンス)不平衡、5.6.1 インダクタンスブリッジ測定法、IEEE Std 120-1989) ñ インダクタンスは、形状と透磁率の関数である。 電圧、電流、周波数に依存しない。 測定される全体的なインダクタンスは、回路の相互インダクタンスと内部インダクタンスの組み合わせであり、回路インダクタンスとして知られている。 誘電体絶縁システムのキャパシタンスが抵抗となり、短絡回路が存在し、コイルの “良い “部分と短絡したターンとの間に相互インダクタンスが生じる場合にのみ、巻線ショートにおける故障検出が可能となる。 相互インダクタンスは、回転機械のローター巻線の評価にも使用される。
c) キャパシタンス(IEEE Std 389-1996, IEEE Std 120-1989) ñ 回路全体のキャパシタンスと接地壁の絶縁キャパシタンスの測定に使用する。 通常は経年変化する。
d) インピーダンス(IEEE Std 388-1992:Section 5.2 インダクタンス(インピーダンス)不平衡、IEEE Std 389-1996:Section 8.3 インピーダンス不平衡、8.4 バランス試験、IEEE Std 120-1989:Section 5 インピーダンス測定) ñ インピーダンスは、周波数、抵抗、インダクタンス、キャパシタンスに依存する。 抵抗が全体のインピーダンスに与える影響は比較的小さく、印加周波数は誘導性リアクタンス成分と容量性リアクタンス成分に影響する。 インダクタンスの増加はインピーダンス値に相加的な影響を与えるが、キャパシタンスは回路インピーダンスに逆の影響を与える。 例えば、回路全体のインダクタンスが増加すれば、インピーダンスはほぼ平行に増加し、回路全体のキャパシタンスが増加すれば、インピーダンスは減少する。
e) 位相角(IEEE Std 120-1989) ñ 回路位相角は、電圧と電流の間の遅延時間の測定値であり、分離度として示される。 回路のインピーダンス、電圧、印加周波数によって直接影響を受ける。
f) 周波数応答試験(IEEE Std 389-1996:Section 11.1 Transformer Frequency Response) 周波数応答試験は,多くの方法を用いて評価することができる。 本ガイドラインでは、周波数を2倍にしたときのコイルの電流の減少率で評価する。 電流/周波数特性は、周波数が高くなるにつれて回路のキャパシタンスが変化することによって影響を受ける。
g) 絶縁抵抗試験 IEEE Std 43-2000 に規定されている。
提供される測定値にかかわらず、主な目的は、三相回転機械や三相変圧器の相間など、同種のコイル間の不平衡を特定することである。
5.0 機器の評価
5.1 三相変圧器の評価
巻線分析技術を使用して三相変圧器の試験を実施する場合、試験される側と反対側の回路を短絡し、接地しなければならない(IEEE Std 388- 1992: Section 5.6.1 Induction Bridge Method of Measurement, IEEE Std 389-1996)。 3つのフェーズそれぞれを測定し、バランスを評価する。 推奨される試験結果の限度については表1を参照のこと。
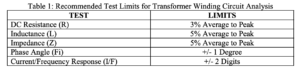
a) FiおよびI/Fテストは、絶縁破壊、すなわち絶縁システム回路の容量および抵抗の変化を検出する。
b) インダクタンスとインピーダンスの測定は、高度な巻線不良と製造または修理におけるターン不良を検出する。
c) 抵抗は、接続の緩み、導線の断線、および関連する問題を検出するために使用される。
5.2 三相誘導回転機の評価
ステーターとローターは、巻線回路解析技術を用いて個別に評価される。 以下のガイドラインはその両方をカバーするものである。
5.2.1 組立済みモーター・ローターの試験
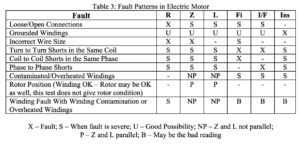
電気モーターのローターによく見られる故障の種類は以下の通りである:
a) エアギャップ(ローターの偏心):ローターに緩みがあるか、モーターシャフトまたはベアリングに深刻な欠陥がない限り、通常は進行性の故障ではない。 振動解析技術を使えば、緩み、ベアリング、モーターシャフトの問題をより早く、より安全に検出することができます。 製造時や修理時のエアギャップの問題は、受入試験中に静的巻線回路解析で検出することができます。 この種の受入試験は、エアギャップが適切に設定されているかどうかを判断するために行われる(取り付け時にローターの両端で測定されたエアギャップの平均値の±10%)4。
b) 鋳造ボイドとローターバー接続部:時間の経過とともにローターバーの破損に至る可能性がある。 アルミ鋳造ローターには常に鋳巣があり、アルミ合金のばらつきや銅合金棒の接合部のばらつきがインダクタンスに影響します。 故障は、シャフトを360度回転させながら、一連の回路インダクタンスまたはインピーダンスを測定することによって検出することができる。 これらの測定値は波形としてグラフ化することができ、波形のインダクタンスやインピーダンスの変化位置を見ることで故障の有無を確認することができる。 波形の傾きや勾配の変化が小さい場合は、通常は侵入性のない小さな欠陥を示し、波形のピークで大きな変化がある場合は、重度のローター欠陥を示す。 重度の故障は、モーターの運転特性に支障をきたす恐れがあります。
c) 破損したローターバー:電気モーターの不適切な操作により通常発生する進行性の故障である。 電気モーターが始動すると、大電流と高周波のためにローターに熱がこもり、冷却期間が必要になる。 また、ローターがストールし、大電流と高いローター周波数が発生する場合もある。 銅合金(またはアルミニウム)とローターの材質の膨張率が異なるため、バー自体に機械的ストレスがかかる。 極度のストレスがかかると、ローターバーに亀裂が入り、モーターのトルク発生能力が低下する可能性がある。 ローターバーが破断すると、周囲のローターバーにさらに電流が流れ、ローターバーの温度がさらに上昇し、さらなるクラックが発生する可能性がある。
試験装置がインダクタンスやインピーダンスを通じて故障を検出できるのは、ローターの位置が変化するにつれて回路の相互インダクタンスが変化するためである。 電気モーターは回転する2次回路を持つ変圧器であるため、ローターの位置が変わると、有効な1次側(ステーター巻線)と2次側(ローター巻線)の比率が変わり、全体の相互インダクタンスとその結果としての回路インピーダンスが変化する。 回転機器の性質上、経時変化は正弦波(またはその変化)で対称的である。
ローターのインダクタンス試験またはインピーダンス試験を実施する一般的なプロセスは、360°の回転を通じて偶数刻みでインダクタンスまたはインピーダンスの測定値を取るか、リアルタイムインダクタンスまたはインピーダンスベースの試験を使用することである。 検査結果は、解釈のためにグラフ化されるべきである。
5.2.2 組立回転機器ステータ試験
組み立てられた回転機器の試験結果の評価によって、故障検出の精度はさまざまに変化する。 例えば、インダクタンス試験の結果は、ローターが異なる位置に配置されるにつれて、値が高くなったり変化したりするので、一次(ステーター)巻線と二次(ローター)巻線の相互インダクタンスの値が比較的同じになるようにローターの位置を調整しなければならない。 しかし、インピーダンスと結合したインダクタンスは、絶縁破壊や巻線の汚染による容量性の影響を示す。 例えば、インピーダンスとインダクタンスが比較的平行であれば、位相のアンバランスはローターの位置に起因する。 少なくとも1つの相のインピーダンスが低下しているか、インピーダンスとインダクタンスが相対的に平行でない場合は、回路の静電容量が変化しており、巻線の汚染または絶縁破壊の可能性を示しています。
初期のターン故障は、位相角または電流/周波数応答の変化として検出されます。 シフトは、例えばFi:77/76/77および/またはI/F:-44/-46/-44のように示すことができる。
5 抵抗とインピーダンスのアンバランス測定値は、ローターの位置が考慮されている場合にのみカウントできる。 測定値は、ローター位置の変化から正弦波のピークまたは谷のいずれかで取らなければならない。
6.0 書誌
a) IEEE Std 43-2000:回転機械の絶縁抵抗試験に関する IEEE 推奨実施基準
b) IEEE 規格 56-1977:大型交流回転機械(10,000 kVA 以上)の絶縁保全に関する IEEE ガイド
c) IEEE Std 118-1978:抵抗測定のための IEEE 標準試験コード
d) IEEE Std 120-1989: 電力回路の電気測定に関する IEEE マスターテストガイド
e) IEEE Std 388-1992:電子電力変換装置のトランスおよびインダクタに関する IEEE 規格
f) IEEE Std 389-1996:電子機器用変圧器およびインダクタの試験に関する IEEE 推奨実施基準
g) IEEE Std 1068-1990:石油および化学産業用モーターの修理および巻戻しのためのIEEE推奨慣行
h) Penrose, Dr. Howard W., Motor Circuit Analysis:理論、応用、エネルギー解析、SUCCESS by DESIGN、2001年
i) Fink, Donald and Beaty, H. Wayne, Standard Handbook for Electrical Engineers, Fourteenth Edition, McGraw-Hill, 2000.
j) Sarma, Mulukutl, Electric Machines:定常理論と動的性能、第2版、PWS出版社、1996年
k) Mazur, Glen and Proctor, Thomas, Troubleshooting Electric Motors, Second Edition, ATP Publishing, 1997.
l) Nasar, Syed, Electric Machines and ElectroMagnetics, McGraw-Hill, 1981


