Directrices de ensayo de máquinas rotativas
1. Visión general
1.1 Ámbito de aplicación
Este documento describe una directriz para evaluar los devanados de inducido y de campo de equipos rotativos, con potencias nominales a partir de 1 caballo (746 vatios), para detectar cortocircuitos en los devanados, desequilibrios de fase y barras de rotor. Se aplica a las máquinas de inducción y a los transformadores.
El documento describe las mediciones típicas de análisis de circuitos de bobinado estático y cómo estas mediciones indican el estado de la máquina. Proporciona directrices sobre los límites de las mediciones de circuitos.
Los tipos de mediciones revisados son proporcionados por instrumentos individuales o conjuntos de instrumentos que proporcionan mediciones básicas de circuitos de bobinado como resistencia, impedancia, inductancia, capacitancia y mediciones de pruebas especializadas. Se reconoce que las técnicas de medición incluirán (Referencia: IEEE Std 120-1989):
a) Las mediciones de resistencia de corriente continua utilizarán valores de corriente continua.
b) Las mediciones de corriente alterna, como la inductancia y la impedancia, serán de corriente alterna utilizando mediciones de onda sinusoidal seleccionadas por el fabricante del instrumento.
c) Todas las mediciones se evaluarán mediante circuitos puenteados y se notificarán dentro de los límites de dichos puentes. No se calcularán las unidades de medida estándar de ingeniería, como la inductancia y la impedancia, excepto cuando los valores se presenten como relaciones, grados o porcentajes.
En el momento de la redacción inicial de esta directriz, la tensión de salida, para proporcionar resultados de ensayo en todas las mediciones de aislamiento de la pared de tierra, excepto en la de aislamiento de la pared de tierra, están en el rango electrónico y normalmente se encuentran por debajo de 10 voltios CA/CC. Las frecuencias de salida estándar de estos instrumentos también suelen ser superiores a 100 Hz. Si se desarrolla instrumentación utilizando principios de ingeniería sólidos que superen estos valores, o si se proporcionan valores adicionales que proporcionen una visión precisa del circuito del motor, podrán incluirse en el ámbito de aplicación de esta directriz.
1.2 Finalidad
El objetivo de esta directriz es describir los métodos y los datos comunes recopilados mediante el análisis del circuito del devanado y proporcionar orientación en la interpretación de los resultados tanto para el aislamiento entre espiras, el aislamiento de la pared de tierra y la evaluación de los rotores de jaula de ardilla. Los métodos de medición del aislamiento de la pared de tierra y los resultados de las pruebas harán referencia a la revisión actual de la norma 43 del IEEE, “Práctica recomendada por el IEEE para probar la resistencia de aislamiento de máquinas rotativas”.
a) Recomendar combinaciones uniformes de resultados de pruebas que puedan utilizarse para evaluar el estado de las máquinas rotativas y los transformadores.
b) Proporcionar directrices generales sobre el método de lectura de las mediciones del circuito del rotor de inducción y la interpretación de los resultados.
c) Definir los tipos de mediciones utilizadas para determinar los tipos de aislamiento entre espiras, aislamiento de la pared de tierra y otras averías de la maquinaria rotativa.
2. Referencias
A continuación figuran las referencias relacionadas con esta norma.
a) IEEE Std 43-2000: IEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery (Práctica recomendada por el IEEE para probar la resistencia de aislamiento de máquinas rotativas).
b) IEEE Std 56-1977: IEEE Guide for Insulation Maintenance of Large Alternating Current Rotating Machinery (10.000 kVA and Larger) (Guía IEEE para el mantenimiento del aislamiento de grandes máquinas rotativas de corriente alterna (10.000 kVA y mayores)).
c) IEEE Std 118 ñ 1978: Código de ensayo estándar IEEE para mediciones de resistencia.
d) IEEE Std 120-1989: IEEE Master Test Guide for Electrical Measurements in Power Circuits.
e) IEEE Std 388 ñ 1992: Norma IEEE para transformadores e inductancias en equipos electrónicos de conversión de potencia.
f) IEEE Std 389 ñ 1996: IEEE Recommended Practice for Testing Electronics Transformers and Inductors (Práctica recomendada por el IEEE para el ensayo de transformadores e inductores electrónicos)
g) IEEE Std 1068 ñ 1990: IEEE Recommended Practice for the Repair and Rewinding of Motors for the Petroleum and Chemical Industry (Práctica recomendada por el IEEE para la reparación y el rebobinado de motores para la industria petrolera y química).
3. 3. Consideraciones de seguridad
El término “análisis estático de circuitos de bobinado” se define como un método de ensayo realizado en equipos sin tensión. Los instrumentos utilizados deben seguir alguna certificación reconocida, como UL, CE, CSA o equivalente. No es posible cubrir todos los aspectos de seguridad en esta directriz. El personal encargado de las pruebas debe consultar los manuales de instrucciones de los fabricantes y las normativas sindicales, empresariales y gubernamentales.
4. Análisis del circuito de bobinado Teoría general
4.1 CIRCUITOS MAGNÉTICOS
Las bobinas y máquinas eléctricas están formadas por una combinación de circuitos electromagnéticos acoplados. Los circuitos magnéticos se desarrollan como resultado del paso de corriente eléctrica a través de conductores y guiados por materiales magnéticos.
En primer lugar, consideremos un conductor de longitud l colocado perpendicularmente a los polos de un imán mientras transporta una corriente I. El resultado es una fuerza de nivel F, donde B es la magnitud de la densidad de flujo magnético (en Tesla, o T) y flujo magnético es la medida de la fuerza del magnetismo. La fórmula resultante se encuentra como:
Fórmula 1: Fuerza (Newtons)
F = BI l
Basado en la posición arbitraria de un conductor siendo l un vector de magnitud l en la dirección de la corriente.
Fórmula 2: Fuerza con posición arbitraria del conductor
F = Il x B
Suponiendo que B es constante en magnitud con el área A:
Fórmula 3: Flujo magnético (Φ, Webber)
Φ = BA o B = Φ/A
B se expresa como Webber(Wb)/m
La relación entre I y B es la siguiente:
Fórmula 4: Ley circuital de Ampere
A/m *d*l = I
Donde A/m es la intensidad del campo magnético H
Cuando un circuito cerrado es atravesado por la corriente N veces, como en una bobina, entonces la fuerza magnetomotriz resultante (mmf o ℑ) es la siguiente:
Fórmula 5: MMF
ℑ = NI
NI también se conoce como los giros del Amperio (At). Un N de uno se conocerá como una “vuelta”.
La inductancia (L) se define como el enlace de flujo por unidad de corriente expresado en unidades de Henry (H).1
Fórmula 6: Inductancia
L = (NΦ)/I
Para un toroide bobinado con ëní bobinas distintas, se pueden definir las inductancias:
Fórmula 7: Campos Toroides1
Lpq = (Np(kpqΦq))/iq
Se puede calcular la energía almacenada en una inductancia que lleva una corriente (i):
Fórmula 8: Energía inductiva
W = (1/2)Li 2
La frecuencia influye en los campos dentro de un conductor. A medida que aumenta la frecuencia aplicada, la corriente y los campos resultantes se desplazan más cerca de la superficie del conductor (efecto piel). Esto se debe al hecho de que en un conductor en el que hay flujo alterno se inducen emfís. Estas emfís son mayores en el centro que en la circunferencia, por lo que la diferencia de potencial tiende a establecer corrientes que se oponen a la corriente en el centro y la ayudan en la circunferencia. De este modo, la corriente se desplaza hacia el exterior del conductor, reduciendo el área efectiva del mismo.î2
1 Máquinas eléctricas y electromecánica, Syed A Nasar, Schaumís Outline Series, 1981
2 Standard Handbook for Electrical Engineers, decimocuarta edición, Donald G Fink, Wayne Beaty, McGraw Hill, 2000.
4.2 SISTEMAS DE AISLAMIENTO
“El aislamiento eléctrico es un medio o un material que, colocado entre conductores a diferentes potenciales, sólo permite que circule a través de él una corriente despreciable en fase con la tensión aplicada. El término dieléctrico es casi sinónimo de aislamiento eléctrico, que puede considerarse el dieléctrico aplicado. Un dieléctrico perfecto no deja pasar ninguna corriente de conducción y sólo deja pasar corriente de carga capacitiva entre conductores”.2 (Véase también la norma IEEE 120-1989, apartado 5.4.2).
La representación de circuito más sencilla de un dieléctrico es una resistencia y un condensador en paralelo. La capacitancia entre conductores (en el vacío) es 0,0884 x 10-12 A/t donde A es el área del conductor en centímetros cuadrados y t es la separación de los conductores en centímetros. “Cuando un material dieléctrico llena el volumen entre los electrodos, la capacitancia es mayor en virtud de las cargas dentro de las moléculas y átomos del material, que atraen más carga a los planos del condensador para el mismo voltaje aplicado. La capacitancia con el dieléctrico entre los electrodos es: “3
Fórmula 9: Capacitancia entre conductores circulares paralelos
C = (2π∈í∈oL)/cosh-1(D/2r)
La permitividad de los sistemas aislantes disminuye hacia abajo (región de dispersión) con el aumento de la frecuencia aplicada, al igual que la polarización iónica-interfase y las polarizaciones dipolares moleculares. En los polímeros, la dispersión dipolar se produce en frecuencias muy bajas.
4.3 RUPTURA DEL AISLAMIENTO
Las averías del aislamiento, denominadas “fallos” en esta directriz, incluyen la contaminación, el seguimiento del arco, el envejecimiento térmico y los fallos mecánicos. Cada tipo de fallo conlleva un factor común: Las propiedades resistivas y capacitivas del aislamiento eléctrico cambian.
La contaminación, en particular la penetración de agua, aumenta la conductividad del aislamiento. El agua tiende a acumularse en las fracturas e inclusiones del sistema de aislamiento. Los campos eléctricos provocan cambios en los contaminantes, incluida la expansión, que rompen aún más el sistema de aislamiento. Otros contaminantes, como gases, vapores, polvo, etc., pueden atacar la composición química del sistema de aislamiento. Una vez que el sistema de aislamiento está completamente puenteado, se considera que el sistema está en cortocircuito. Normalmente, esto ocurrirá primero entre los conductores, donde el sistema de aislamiento es más débil. Las zonas clave de fallo incluyen la parte no sujeta de la bobina, como los giros finales de una máquina giratoria (que también es el punto de mayor tensión eléctrica de los devanados), y el punto de mayor tensión mecánica, como el punto en el que las bobinas salen de las ranuras de una máquina giratoria.
El seguimiento del arco de los sistemas de aislamiento se produce cuando pasa una corriente elevada entre los conductores a través de la superficie de un sistema de aislamiento. El aislamiento en esos puntos se carboniza, cambiando los componentes capacitivos y resistivos del sistema de aislamiento eléctrico. El seguimiento del arco es a menudo el resultado de: Fuertes tensiones eléctricas; Contaminación; o, Ambos. Este tipo de avería se produce principalmente entre conductores o bobinas y normalmente termina con un cortocircuito.
El envejecimiento térmico de un sistema de aislamiento se produce a medida que los sistemas de aislamiento eléctrico se degradan como resultado de la Ecuación Química de Arrhenius. La ìregla empíricaî generalmente aceptada es que la vida térmica del sistema de aislamiento se reduce a la mitad por cada 10o C de aumento de la temperatura de funcionamiento. El aislamiento se degradará y carbonizará rápidamente cuando alcance la temperatura límite del sistema de aislamiento.
Otros factores ambientales también influyen en la vida útil térmica del sistema de aislamiento, entre los que se incluyen: Contaminación del bobinado; Humedad; Electrólisis; y, Otras tensiones eléctricas.
Entre los fallos mecánicos en el sistema de aislamiento eléctrico se incluyen el agrietamiento por tensión, la vibración, la incursión mecánica y los fallos mecánicos. Las fuerzas dentro de una bobina durante diversas operaciones, provocarán movimientos mecánicos y pueden terminar en la fractura de los materiales aislantes. Las vibraciones eléctricas y mecánicas causan tensiones indebidas en el sistema de aislamiento, lo que provoca fracturas por tensión y aflojamiento del sistema de aislamiento. La incursión mecánica incluye el movimiento de materiales en el sistema de aislamiento, ya sea entre los conductores y/o el sistema de aislamiento a tierra. Los fallos mecánicos incluyen averías como las de los rodamientos, en máquinas rotativas, que hacen que el rodamiento se desprenda y atraviese los componentes móviles del sistema. Estos fallos pueden terminar como cortocircuitos entre conductores, bobinas o bobina a tierra.
4.4 Etapas del fallo del aislamiento del devanado
Las principales causas de fallo de los bobinados son: Rotura del aislamiento (térmica); Contaminación; Incursión de humedad; Transitorios; y Tensiones mecánicas, y en primer lugar dan lugar a una rotura del aislamiento entre conductores dentro de la misma bobina, entre bobinas de la misma fase o entre bobinas de fases separadas. Estos “cortocircuitos” del devanado pueden, aunque no siempre, acabar en un fallo de resistencia de aislamiento cuando el devanado falla realmente. La detección de cambios entre conductores proporciona una mayor posibilidad de reparación temprana o acción de sustitución antes de que el equipo deje de funcionar. Tenga en cuenta que la velocidad de fallo dependerá de la gravedad del fallo (es decir, de la relación de vueltas) y del potencial entre conductores (por ejemplo, los fallos pueden ser de tendencia en equipos de menos de 600 Vca y fallarán rápidamente en sistemas de más de 1000 Vca).
Las etapas generales de un fallo de bobinado entre conductores son las siguientes:
– Etapa 1: El aislamiento entre conductores se tensa, lo que provoca un cambio en los valores resistivos y capacitivos del aislamiento en el punto de fallo. Las altas temperaturas y los fallos reactivos similares provocan la carbonización del aislamiento (dieléctrico) en ese punto. La carbonización también puede producirse debido al rastreo a través del sistema de aislamiento.
– Fase 2: El punto de fallo se vuelve más resistivo. Se produce una inductancia mutua entre la parte “buena” del devanado (y otros componentes del sistema que transportan corriente) y las espiras en cortocircuito. Las pérdidas de I2 R aumentan en el punto de la avería debido al aumento de la corriente dentro de las espiras de cortocircuito, lo que incrementa la temperatura en ese punto y hace que el sistema de aislamiento se carbonice rápidamente. El motor puede empezar a dispararse en este punto, aunque es posible que pueda funcionar tras un breve periodo de enfriamiento.
– Fase 3: El aislamiento se rompe y la energía en el punto del cortocircuito puede provocar una ruptura explosiva del sistema de aislamiento y la vaporización de los bobinados.
4.5 Comparación de equipos
Las máquinas rotativas y los transformadores funcionan según principios similares. Por ejemplo, un motor de inducción trifásico tiene un circuito primario (bobinado del estator) y otro secundario (bobinado del rotor), al igual que los bobinados primario y secundario de un transformador. La diferencia es que la energía eléctrica se transforma en otro valor de energía eléctrica, con transformadores. La misma energía eléctrica se convierte en energía mecánica mediante un motor eléctrico.
Los devanados de los transformadores se diseñan para que, por lo general, estén equilibrados entre fases. Esto permite una energía equilibrada en el secundario y unas impedancias de circuito equilibradas en todo el sistema. Las máquinas rotativas trifásicas (ensambladas) tienen una inductancia mutua cambiante al variar la posición del rotor. El resultado puede ser un desequilibrio inductivo probado, y el desequilibrio de impedancia resultante, con el rotor situado en una posición mientras se prueban las tres fases. Los desequilibrios de los devanados de las máquinas rotativas pueden evaluarse compensando la posición del rotor o comparando las lecturas de impedancia e inductancia.
4.6 Medidas de ensayo para la evaluación
Las mediciones eléctricas básicas para la evaluación de devanados de transformadores y maquinaria rotativa incluyen:
a) Resistencia (IEEE Std 118-1978, IEEE Std 389-1996) ñ Se utiliza para detectar variaciones en el tamaño de los cables, conexiones y circuitos abiertos/de alta resistencia.
b) Inductancia (IEEE Std. 388-1992: Sección 5.2 Desequilibrio de inductancia (impedancia), 5.6.1 Método de medición del puente de inductancia, IEEE Std. 120-1989) ñ La inductancia es una función de la geometría y la permeabilidad. Es independiente de la tensión, la corriente y la frecuencia. La inductancia global medida es una combinación de las inductancias mutuas e internas del circuito, conocida como inductancia del circuito. La detección de fallos en cortocircuitos de bobinado sólo es posible cuando las capacitancias de los sistemas de aislamiento dieléctrico se vuelven resistivas y existe un circuito cortocircuitado, lo que da lugar a una inductancia mutua entre la parte “buena” de la bobina y las espiras cortocircuitadas. La inductancia mutua también se utiliza en la evaluación de los devanados del rotor en máquinas rotativas.
c) Capacitancia (IEEE Std 389-1996, IEEE Std 120-1989) ñ Se utiliza para medir la capacitancia global del circuito y la capacitancia de aislamiento de la pared de tierra. Tendencia normal a lo largo del tiempo.
d) Impedancia (IEEE Std 388-1992: Sección 5.2 Desequilibrio de inductancia (impedancia), IEEE Std 389-1996: Sección 8.3 Desequilibrio de impedancia, 8.4 Pruebas de equilibrio, IEEE Std 120-1989: Sección 5 Mediciones de impedancia) ñ La impedancia depende de la frecuencia, la resistencia, la inductancia y la capacitancia. La resistencia tiene un impacto relativamente pequeño en la impedancia global y la frecuencia aplicada afecta a los componentes de reactancia inductiva y capacitiva. Los aumentos de inductancia tienen un efecto aditivo en los valores de impedancia, mientras que la capacitancia tiene un impacto inverso en la impedancia del circuito. Por ejemplo, un aumento de la inductancia global del circuito generará un aumento aproximadamente paralelo de la impedancia, un aumento de la capacitancia global del circuito hará que la impedancia disminuya.
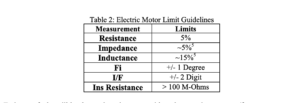
e) Ángulo de fase (IEEE Std 120-1989) ñ El ángulo de fase del circuito es una medida del desfase entre la tensión y la corriente presentada como grados de separación. Se ve afectado directamente por la impedancia del circuito, la tensión y la frecuencia aplicadas.
f) Pruebas de respuesta en frecuencia (IEEE Std 389-1996: Sección 11.1 Respuesta en frecuencia del transformador) ñ Las pruebas de respuesta en frecuencia pueden evaluarse utilizando varios métodos. A efectos de esta directriz, la evaluación se presentará como la reducción porcentual de la corriente de una bobina cuando se duplica la frecuencia, también conocida como prueba de respuesta corriente/frecuencia. Las respuestas de corriente/frecuencia se ven afectadas por los cambios en las capacitancias del circuito a medida que aumenta la frecuencia.
g) Pruebas de resistencia de aislamiento ñ Cubiertas por IEEE Std 43-2000.
Independientemente de las mediciones proporcionadas, el objetivo principal es identificar desequilibrios entre bobinas similares, como por ejemplo entre fases en una máquina rotativa trifásica o en un transformador trifásico.
5.0 Evaluación del equipo
5.1 Evaluación de los transformadores trifásicos
Cuando se realicen pruebas en transformadores trifásicos utilizando técnicas de análisis de devanados, el circuito opuesto al lado que se está probando debe estar en cortocircuito y conectado a tierra (IEEE Std 388- 1992: Sección 5.6.1 Método de medición por puente de inducción, IEEE Std 389-1996). Se mide y evalúa el equilibrio de cada una de las tres fases. Véanse los límites recomendados para los resultados de las pruebas en el cuadro 1.
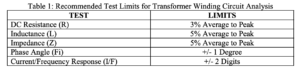
a) Las pruebas Fi e I/F detectarán la rotura del aislamiento ñ cambios en las capacitancias y resistencias del circuito del sistema de aislamiento.
b) Las mediciones de inductancia e impedancia detectarán fallos avanzados del bobinado y defectos de giro en la fabricación o reparación.
c) La resistencia se utiliza para detectar conexiones sueltas, conductores rotos y problemas relacionados.
5.2 Evaluación de las máquinas rotativas de inducción trifásicas
El estátor y el rotor se evalúan por separado utilizando técnicas de análisis de circuitos de bobinado. Las siguientes directrices cubrirán ambos aspectos.
5.2.1 Prueba del rotor del motor montado
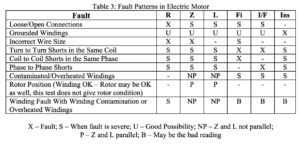
Los tipos de averías comunes en los rotores de los motores eléctricos son:
a) Entrehierro (excentricidad del rotor): Normalmente no es un fallo progresivo, a menos que el rotor esté flojo o que se haya producido un fallo grave en el eje del motor o en los cojinetes. Los problemas de holguras, rodamientos y ejes de motor pueden detectarse con mayor rapidez y seguridad mediante técnicas de análisis de vibraciones. Los problemas de entrehierro de fabricación y reparación pueden detectarse con el análisis del circuito de bobinado estático durante las pruebas de aceptación o en el taller de fabricación/reparación antes de perder tiempo instalando el equipo. Este tipo de prueba de aceptación se utiliza para determinar si el entrehierro se ha ajustado correctamente (+/- 10% de la lectura media del entrehierro tomada en cualquiera de los extremos del rotor durante la instalación).4
b) Vacíos de fundición y conexiones de la barra del rotor: Con el tiempo pueden convertirse en “rotura de la barra del rotor”. Siempre hay vacíos de fundición en los rotores de aluminio fundido, variaciones en la aleación de aluminio y variaciones en las uniones de las barras de aleación de cobre que afectarán a la inductancia. Los fallos pueden detectarse tomando una serie de lecturas de inductancia o impedancia del circuito a medida que el eje gira 360 grados. Estas lecturas se pueden representar gráficamente como una forma de onda y ver si hay fallos observando la posición de los cambios de inductancia y/o impedancia de la forma de onda. Un pequeño cambio en la inclinación o pendiente de la forma de onda indica un defecto pequeño, normalmente no intrusivo, mientras que un cambio significativo en el pico de la forma de onda indica fallos graves en el rotor. Los fallos graves pueden interferir en las características de funcionamiento del motor.
c) Rotura de las barras del rotor: Son fallos progresivos que se producen normalmente debido a un funcionamiento incorrecto del motor eléctrico. Al arrancar un motor eléctrico, el calor se acumula en el rotor debido a las altas corrientes y la alta frecuencia, lo que requiere un periodo de enfriamiento. En otros casos, un rotor puede calarse, provocando corrientes elevadas y frecuencias de rotor altas. La velocidad de dilatación de las aleaciones de cobre (o aluminio) y los materiales del rotor son diferentes, lo que provoca tensiones mecánicas en las propias barras. En caso de esfuerzo extremo, las barras del rotor pueden agrietarse, reduciendo la capacidad del motor para producir par. A medida que las barras del rotor se fracturan, las barras del rotor circundantes transportan corriente adicional, lo que provoca un aumento adicional de las temperaturas de las barras del rotor y la posibilidad de que se produzcan más grietas.
La capacidad de los equipos de prueba para detectar fallos a través de la inductancia y la impedancia se debe a los cambios en la inductancia mutua del circuito a medida que cambia la posición del rotor. Como un motor eléctrico es un transformador con un circuito secundario giratorio, cuando cambia la posición del rotor cambia la relación efectiva entre el primario (devanados del estator) y el secundario (devanados del rotor) y cambia la inductancia mutua global y la impedancia resultante del circuito. Debido a la naturaleza de los equipos rotativos, los cambios a lo largo del tiempo serán sinusoidales (o alguna variación) y simétricos.
El proceso general para realizar una prueba de inductancia o impedancia del rotor es tomar lecturas de inductancia o impedancia en incrementos pares a través de 360 grados de rotación, o utilizando una prueba basada en inductancia o impedancia en tiempo real. Los resultados de las pruebas deben representarse gráficamente para su interpretación.
5.2.2 Pruebas de estator de equipo rotativo ensamblado
La evaluación de los resultados de las pruebas de los equipos rotativos ensamblados proporcionará diversos grados de precisión en la detección de fallos. Por ejemplo, los resultados de las pruebas de inductancia proporcionarán valores elevados y variables según se coloque el rotor en distintas posiciones, por lo que la posición del rotor debe ajustarse de modo que los valores de inductancia mutua entre los devanados primario (estator) y secundario (rotor) sean relativamente iguales. Sin embargo, la inductancia acoplada a la impedancia muestra el impacto capacitivo de la rotura del aislamiento o la contaminación del bobinado. Por ejemplo, si la impedancia y la inductancia son relativamente paralelas, el desequilibrio de fase se debería a la posición del rotor. Si se produce una reducción de la impedancia de al menos una fase, o la impedancia y la inductancia no son relativamente paralelas, la capacitancia del circuito ha cambiado, lo que indica una posible contaminación del bobinado o una rotura del aislamiento.
Los primeros fallos de giro se detectarán como cambios en el ángulo de fase o en la respuesta de corriente/frecuencia como un “desplazamiento” en las lecturas. Un desplazamiento puede indicarse, por ejemplo, como Fi: 77/76/77 y/o I/F: -44/-46/- 44.
5 Las lecturas de resistencia y desequilibrio de impedancia sólo pueden contabilizarse si se tiene en cuenta la posición del rotor. Las lecturas deben tomarse en un pico o en un valle de la onda sinusoidal del cambio de posición del rotor.
6.0 Bibliografía
a) IEEE Std 43-2000: IEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery (Práctica recomendada por el IEEE para probar la resistencia de aislamiento de máquinas rotativas).
b) IEEE Std 56-1977: IEEE Guide for Insulation Maintenance of Large Alternating Current Rotating Machinery (10.000 kVA and Larger) (Guía IEEE para el mantenimiento del aislamiento de grandes máquinas rotativas de corriente alterna (10.000 kVA y mayores)).
c) IEEE Std 118-1978: Código de ensayo estándar IEEE para mediciones de resistencia
d) IEEE Std 120-1989: IEEE Master Test Guide for Electrical Measurements in Power Circuits.
e) Norma IEEE 388-1992: Norma IEEE para transformadores e inductancias en equipos electrónicos de conversión de potencia.
f) IEEE Std 389-1996: Práctica recomendada por el IEEE para probar transformadores e inductores electrónicos.
g) IEEE Std 1068-1990: IEEE Recommended Practice for the Repair and Rewinding of Motors for the Petroleum and Chemical Industry (Práctica recomendada por el IEEE para la reparación y el rebobinado de motores para la industria petrolera y química).
h) Penrose, Dr. Howard W., Motor Circuit Analysis: Theory, Application and Energy Analysis, SUCCESS by DESIGN, 2001
i) Fink, Donald y Beaty, H. Wayne, Standard Handbook for Electrical Engineers, decimocuarta edición, McGraw-Hill, 2000.
j) Sarma, Mulukutl, Máquinas eléctricas: Steady-State Theory and Dynamic Performance, Segunda edición, PWS Publishing Company, 1996
k) Mazur, Glen y Proctor, Thomas, Troubleshooting Electric Motors, segunda edición, ATP Publishing, 1997.
l) Nasar, Syed, Máquinas eléctricas y electromagnetismo, McGraw-Hill, 1981

AT34™
Analice y establezca tendencias de la integridad de los componentes del motor para detectar fallos a tierra, fallos en los devanados internos, conexiones abiertas y contaminación, todo ello con un dispositivo portátil.

Seminario online de diagnóstico de motores de primera clase – Nivel 1 – 12-16 de junio
¿Te has enterado? Del 12 al 16 de junio celebraremos nuestro Seminario de Diagnóstico de Motores de Primera Clase Nivel 1. Será un seminario online/virtual que comenzará cada día a […]

Preconlub 15-16 junio 2023 León, México
Acompañe a Gloria Urizar, Gerente Regional de ATP LATAM, en su presentación en Preconlub 2023. Más información: https://www.preconlub.com/ Gloria Urizar Director Regional – […]