Directrizes para o ensaio de máquinas rotativas
1. Overview
1.1 Scope of application
This document describes a guideline for evaluating armature and field windings of rotating equipment with a rated power of 1 horsepower (746 watts) or more, with respect to short circuits, phase imbalances, and rotor bars. It applies to induction machines and transformers.
This document describes typical measurements for static winding circuit analysis and how these measurements indicate the machine’s condition. It provides guidelines on the limits of circuit measurements.
The types of measurements analyzed are provided by individual instruments or collections of instruments that provide basic measurements of winding circuits, such as resistance, impedance, inductance, capacitance, and specialized test measurements. It is recognized that measurement techniques should include (Reference: IEEE Std 120-1989):
a) As medições de resistência em corrente contínua devem utilizar valores de corrente contínua.
b) As medições de corrente alternada, como a indutância e a impedância, devem ser efectuadas em corrente alternada, utilizando medições de ondas sinusoidais seleccionadas pelo fabricante do instrumento.
c) Todas as medições devem ser avaliadas através de circuitos em ponte e são comunicadas dentro dos limites dessas pontes. Não devem ser calculadas unidades de medida normalizadas de engenharia, como a indutância e a impedância, exceto quando os valores são apresentados como razões, graus ou percentagens.
No momento da redação inicial deste guia, a tensão de saída, para fornecer resultados de ensaio em todas as medições de isolamento da parede do solo, com exceção das medições de isolamento, está na gama eletrónica e encontra-se normalmente abaixo dos 10 Volts CA/CC. As frequências de saída padrão para estes instrumentos também variam geralmente acima de 100 Hz. Se forem desenvolvidos instrumentos utilizando princípios de engenharia sólidos que excedam estes valores, ou se forem fornecidos valores adicionais que proporcionem uma visão precisa do circuito do motor, estes podem ser incluídos no âmbito destas orientações.
1.2 Objetivo
O objetivo deste guia é delinear os métodos e dados comuns recolhidos utilizando a análise do circuito de enrolamento e fornecer orientação na interpretação dos resultados para o isolamento entre espiras, o isolamento da parede de terra e a avaliação de rotores em gaiola de esquilo. Os métodos de medição do isolamento da parede de terra e os resultados dos ensaios devem fazer referência à revisão atual da norma IEEE 43, “IEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery”.
a) Recomendar combinações uniformes de resultados de ensaios que possam ser utilizados para avaliar o estado das máquinas rotativas e dos transformadores.
b) Fornecer orientações gerais para o método de leitura das medições do circuito do rotor de indução e para a interpretação dos resultados.
c) Definir os tipos de medições utilizadas para determinar os tipos de isolamento entre espiras, o isolamento da parede de terra e outros defeitos em máquinas rotativas.
2. Referências
Seguem-se referências que se relacionam com esta norma.
a) IEEE Std 43-2000: IEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery (Prática recomendada pelo IEEE para testar a resistência de isolamento de máquinas rotativas)
b) IEEE Std 56-1977: Guia do IEEE para a manutenção do isolamento de grandes máquinas rotativas de corrente alternada (10 000 kVA e maiores)
c) IEEE Std 118 ñ 1978: Código de teste padrão IEEE para medições de resistência
d) IEEE Std 120-1989: Guia de ensaio principal do IEEE para medições eléctricas em circuitos de potência
e) IEEE Std 388 ñ 1992: Norma IEEE para Transformadores e Indutores em Equipamento Eletrónico de Conversão de Energia
f) IEEE Std 389 ñ 1996: IEEE Recommended Practice for Testing Electronics Transformers and Inductors
g) IEEE Std 1068 ñ 1990: IEEE Recommended Practice for the Repair and Rewinding of Motors for the Petroleum and Chemical Industry (Prática recomendada pelo IEEE para a reparação e rebobinagem de motores para a indústria petrolífera e química)
3. Considerações sobre segurança
O termo “análise estática de circuitos de enrolamento” é definido como um método de ensaio efectuado em equipamento desenergizado. Os instrumentos utilizados devem seguir alguma certificação reconhecida, como UL, CE, CSA ou equivalente. Não é possível abranger todos os aspectos de segurança nas presentes directrizes. O pessoal de ensaio deve consultar os manuais de instruções do fabricante, os regulamentos do sindicato, da empresa e do governo.
4. Análise do circuito do enrolamento Teoria geral
4.1 CIRCUITOS MAGNÉTICOS
As bobinas e máquinas eléctricas são constituídas por uma combinação de circuitos electromagnéticos acoplados. Os circuitos magnéticos desenvolvem-se como resultado da passagem de corrente eléctrica através de condutores e guiada através de materiais magnéticos.
Em primeiro lugar, considere-se um condutor de comprimento l colocado perpendicularmente aos pólos de um íman enquanto transporta uma corrente I. O resultado é uma força de nível F, em que B é a magnitude da densidade do fluxo magnético (em Tesla, ou T) e o fluxo magnético é a medida da força do magnetismo. A fórmula resultante é encontrada como:
Fórmula 1: Força (Newtons)
F = BI l
Com base na posição arbitrária de um condutor, sendo l um vetor de magnitude l na direção da corrente.
Fórmula 2: Força com posição arbitrária do condutor
F = Il x B
Assumindo que B é constante em magnitude com a área A:
Fórmula 3: Fluxo magnético (Φ, Webber)
Φ = BA ou B = Φ/A
B é expresso em Webber(Wb)/m
A relação entre I e B é a seguinte:
Fórmula 4: Lei Circuital de Ampereís
A/m *d*l = I
Em que A/m é a intensidade do campo magnético H
Quando um circuito fechado é percorrido pela corrente N vezes, como numa bobina, então a força magnetomotriz resultante (mmf ou ℑ) é a seguinte:
Fórmula 5: MMF
ℑ = NI
A NI é também conhecida como a volta do ampere (At). Um N de um será conhecido como um ëturn.í
A indutância (L) é definida como a ligação de fluxo por unidade de corrente, apresentada em unidades de Henry (H).1
Fórmula 6: Indutância
L = (NΦ)/I
Para um toróide enrolado com ëní bobinas distintas, as indutâncias podem ser definidas:
Fórmula 7: Campos toroidais1
Lpq = (Np(kpqΦq))/iq
A energia armazenada numa indutância pode ser calculada, transportando uma corrente (i):
Fórmula 8: Energia indutiva
W = (1/2)Li 2
A frequência tem impacto nos campos dentro de um condutor. À medida que a frequência aplicada aumenta, a corrente e os campos resultantes aproximam-se da superfície do condutor (efeito de pele). Isto deve-se ao facto de existirem emfís induzidas num condutor em que existe um fluxo alternado. Estas emfís são maiores no centro do que na circunferência, pelo que a diferença de potencial tende a estabelecer correntes que se opõem à corrente no centro e a ajudam na circunferência. A corrente é assim forçada para o exterior do condutor, reduzindo a área efectiva do condutor.î2
1 Electric Machines and Electromechanics, Syed A Nasar, Schaumís Outline Series, 1981
2 Standard Handbook for Electrical Engineers, Fourteenth Edition, Donald G Fink, Wayne Beaty, McGraw Hill, 2000.
4.2 SISTEMAS DE ISOLAMENTO
“O isolamento elétrico é um meio ou um material que, quando colocado entre condutores a potenciais diferentes, permite que apenas uma corrente negligenciável em fase com a tensão aplicada flua através dele. O termo dielétrico é quase sinónimo de isolamento elétrico, que pode ser considerado o dielétrico aplicado. Um dielétrico perfeito não passa qualquer corrente de condução e apenas corrente de carga capacitiva entre condutores. “2 (Ver também IEEE Std 120-1989, Secção 5.4.2)
A representação mais simples do circuito de um dielétrico é uma resistência e um condensador em paralelo. A capacitância entre condutores (no vácuo) é 0,0884 x 10-12 A/t onde A é a área do condutor em centímetros quadrados e t é o espaçamento dos condutores em centímetros. “Quando um material dielétrico preenche o volume entre os eléctrodos, a capacitância é maior em virtude das cargas existentes nas moléculas e átomos do material, que atraem mais carga para os planos do condensador para a mesma tensão aplicada. A capacitância com o dielétrico entre os eléctrodos é: “3
Fórmula 9: Capacitância entre condutores circulares paralelos
C = (2π∈í∈oL)/cosh-1(D/2r)
A permissividade dos sistemas de isolamento diminui para baixo (região de dispersão) com o aumento da frequência aplicada, tal como a polarização da interface iónica e as polarizações dipolares moleculares. Nos polímeros, a dispersão dipolar ocorre em frequências muito baixas.
4.3 RUPTURA DO ISOLAMENTO
As avarias no isolamento, designadas por “falhas” no âmbito destas directrizes, incluem a contaminação, o seguimento do arco, o envelhecimento térmico e as falhas mecânicas. Cada tipo de defeito tem um fator comum: A alteração das propriedades resistivas e capacitivas do isolamento elétrico.
A contaminação, em particular a penetração de água, aumenta a condutividade do isolamento. A água tende a acumular-se nas fracturas do isolamento e nas inclusões dentro do sistema de isolamento. Os campos eléctricos provocam alterações nos contaminantes, incluindo a expansão, o que provoca uma maior degradação do sistema de isolamento. Outros contaminantes, incluindo gases, vapores, poeiras, etc., podem atacar a composição química do sistema de isolamento. Uma vez que o sistema de isolamento esteja completamente ligado, o sistema é então considerado em curto-circuito. Normalmente, isto ocorre primeiro entre os condutores, onde o sistema de isolamento é mais fraco. As principais áreas de falha incluem a parte não segura da bobina, como as voltas finais de uma máquina rotativa (que também é o ponto de maior tensão eléctrica dos enrolamentos), e o ponto de maior tensão mecânica, como o ponto em que as bobinas deixam as ranhuras numa máquina rotativa.
O seguimento do arco em sistemas de isolamento ocorre quando uma corrente elevada passa entre condutores através da superfície de um sistema de isolamento. O isolamento nesses pontos carboniza, alterando os componentes capacitivos e resistivos do sistema de isolamento elétrico. O seguimento do arco é frequentemente o resultado de: Fortes tensões eléctricas; Contaminação; ou ambos. Este tipo de defeito ocorre principalmente entre condutores ou bobinas e normalmente termina com um curto-circuito.
O envelhecimento térmico de um sistema de isolamento ocorre à medida que os sistemas de isolamento elétrico se degradam como resultado da Equação Química de Arrhenius. A regra prática geralmente aceite é que a vida térmica do sistema de isolamento diminui para metade por cada aumento de 10o C na temperatura de funcionamento. O isolamento degradar-se-á rapidamente e carbonizará quando atingir o limite de temperatura do sistema de isolamento.
Outros factores ambientais também têm impacto na vida térmica do sistema de isolamento, incluindo Contaminação do enrolamento; humidade; eletrólise; e outras tensões eléctricas.
As falhas mecânicas no sistema de isolamento elétrico incluem fissuração por tensão, vibração, incursão mecânica e falhas mecânicas. As forças no interior de uma bobina, durante as várias operações, provocam movimentos mecânicos e podem levar à fratura dos materiais de isolamento. As vibrações eléctricas e mecânicas provocam tensões indevidas no sistema de isolamento, resultando em fracturas por tensão e na soltura do sistema de isolamento. A incursão mecânica inclui o movimento de materiais para o sistema de isolamento, quer entre condutores e/ou sistema de isolamento para a terra. As falhas mecânicas incluem falhas como as dos rolamentos, em máquinas rotativas, que fazem com que o rolamento se desfaça e atravesse os componentes móveis do sistema. Estes defeitos podem terminar como curto-circuitos entre condutores, bobinas ou bobina à terra.
4.4 Fases da falha do isolamento do enrolamento
As principais causas de falha do enrolamento incluem: Quebra de isolamento (térmico); Contaminação; Incursão de humidade; transientes; e tensões mecânicas, e primeiro resultam numa quebra de isolamento entre condutores dentro da mesma bobina, entre bobinas na mesma fase ou entre bobinas de fases separadas. Estes “curtos-circuitos” do enrolamento podem, mas nem sempre, terminar como um defeito de resistência de isolamento quando o enrolamento falha efetivamente. A deteção de alterações entre condutores proporciona uma maior possibilidade de reparação precoce ou de ação de substituição antes de o equipamento deixar de funcionar. Note-se que a taxa de falha dependerá da gravidade da falha (ou seja, do rácio de espiras) e do potencial entre condutores (por exemplo, as falhas podem ser tendencialmente em equipamentos com menos de 600 Vca e falharão rapidamente em sistemas com mais de 1000 Vca).
As fases gerais de um defeito de enrolamento entre condutores são as seguintes
– Fase 1: O isolamento entre os condutores é sujeito a tensão, provocando uma alteração dos valores resistivos e capacitivos do isolamento no ponto de defeito. As temperaturas elevadas e os defeitos reactivos semelhantes provocam a carbonização do isolamento (dielétrico) nesse ponto. A carbonização também pode ocorrer devido ao rastreamento através do sistema de isolamento.
– Fase 2: O ponto de falha torna-se mais resistivo. Ocorre uma indutância mútua entre a parte “boa” do enrolamento (e outros componentes do sistema que transportam corrente) e as espiras de curto-circuito. As perdas I2 R aumentam no ponto de defeito devido ao aumento da corrente nas curvas de curto-circuito, aumentando a temperatura nesse ponto e provocando a rápida carbonização do sistema de isolamento. O motor pode começar a disparar nesta altura, embora possa funcionar após um curto período de arrefecimento.
– Fase 3: O isolamento rompe-se e a energia no ponto de curto-circuito pode provocar uma rutura explosiva do sistema de isolamento e a vaporização dos enrolamentos.
4.5 Comparação de equipamentos
As máquinas rotativas e os transformadores funcionam segundo princípios semelhantes. Por exemplo, um motor de indução trifásico tem um circuito primário (enrolamento do estator) e secundário (enrolamento do rotor), tal como acontece com os enrolamentos primário e secundário de um transformador. A diferença é que a energia eléctrica é transformada num valor diferente de energia eléctrica, através de transformadores. A mesma energia eléctrica é convertida em energia mecânica através de um motor elétrico.
Os enrolamentos dos transformadores são concebidos de forma a estarem, normalmente, equilibrados entre fases. Isto permite uma energia equilibrada no secundário e impedâncias de circuito equilibradas em todo o sistema. As máquinas rotativas trifásicas (montadas) têm uma indutância mútua variável à medida que a posição do rotor muda. O resultado pode ser um desequilíbrio indutivo testado e um desequilíbrio de impedância resultante, com o rotor localizado numa posição enquanto as três fases são testadas. Os desequilíbrios dos enrolamentos de máquinas rotativas podem ser avaliados compensando a posição do rotor ou comparando as leituras de impedância e indutância.
4.6 Medidas de teste para avaliação
As medições eléctricas básicas para a avaliação dos enrolamentos de transformadores e máquinas rotativas incluem:
a) Resistência (IEEE Std 118-1978, IEEE Std 389-1996) ñ Utilizada para detetar variações na dimensão dos fios, ligações e circuitos de resistência aberta/elevada.
b) Indutância (IEEE Std 388-1992: Secção 5.2 Desequilíbrio da indutância (impedância), 5.6.1 Método de medição da ponte de indutância, IEEE Std 120-1989) ñ A indutância é uma função da geometria e da permeabilidade. É independente da tensão, da corrente e da frequência. A indutância global medida é uma combinação das indutâncias mútua e interna do circuito, conhecida como indutância do circuito. A deteção de avarias em curto-circuitos de bobinas só é possível quando as capacitâncias dos sistemas de isolamento dielétrico se tornam resistivas e existe um circuito em curto-circuito, resultando numa indutância mútua entre a parte “boa” da bobina e as espiras em curto-circuito. A indutância mútua é também utilizada na avaliação dos enrolamentos do rotor em máquinas rotativas.
c) Capacitância (IEEE Std 389-1996, IEEE Std 120-1989) ñ Utilizada para medir a capacitância global do circuito e a capacitância do isolamento da parede de terra. Tendência normal ao longo do tempo.
d) Impedância (IEEE Std 388-1992: Secção 5.2 Desequilíbrio de indutância (impedância), IEEE Std 389-1996: Secção 8.3 Desequilíbrio de impedância, 8.4 Ensaios de equilíbrio, IEEE Std 120-1989: Secção 5 Medições de impedância) ñ A impedância depende da frequência, da resistência, da indutância e da capacitância. A resistência tem um impacto relativamente pequeno na impedância global e a frequência aplicada tem impacto nos componentes de reactância indutiva e capacitiva. Os aumentos da indutância têm um efeito aditivo nos valores da impedância, enquanto a capacitância tem um impacto inverso na impedância do circuito. Por exemplo, um aumento na indutância global do circuito gerará um aumento aproximadamente paralelo na impedância, um aumento na capacitância global do circuito fará com que a impedância diminua.
e) Ângulo de fase (IEEE Std 120-1989) ñ O ângulo de fase do circuito é uma medida do tempo de desfasamento entre a tensão e a corrente apresentada como graus de separação. É diretamente afetado pela impedância do circuito, pela tensão e pela frequência aplicadas.
f) Ensaios de resposta em frequência (IEEE Std 389-1996: Secção 11.1 Resposta em frequência do transformador) ñ Os ensaios de resposta em frequência podem ser avaliados utilizando vários métodos. Para efeitos das presentes directrizes, a avaliação será apresentada como a redução percentual da corrente de uma bobina quando a frequência é duplicada, também conhecida como ensaio de resposta corrente/frequência. As respostas de corrente/frequência são afectadas por alterações nas capacitâncias do circuito à medida que a frequência aumenta.
g) Ensaios de resistência de isolamento ñ Abrangidos pela norma IEEE Std 43-2000.
Independentemente das medições efectuadas, o objetivo principal é identificar desequilíbrios entre bobinas semelhantes, como por exemplo entre fases numa máquina rotativa trifásica ou num transformador trifásico.
5.0 Avaliação do equipamento
5.1 Avaliação de transformadores trifásicos
Durante a realização de ensaios em transformadores trifásicos utilizando técnicas de análise de enrolamentos, o circuito oposto ao lado que está a ser ensaiado deve estar em curto-circuito e ligado à terra (IEEE Std 388- 1992: Secção 5.6.1 Método de medição por ponte de indução, IEEE Std 389-1996). Cada uma das três fases é medida e avaliada quanto ao seu equilíbrio. Ver o quadro 1 para os limites recomendados para os resultados dos ensaios.
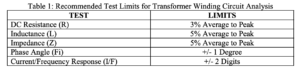
a) Os ensaios Fi e I/F detectarão a rutura do isolamento ñ alterações das capacitâncias e resistências dos circuitos do sistema de isolamento.
b) As medições da indutância e da impedância detectarão avarias avançadas do enrolamento e defeitos de rotação no fabrico ou na reparação.
c) A resistência é utilizada para detetar ligações soltas, condutores partidos e problemas relacionados.
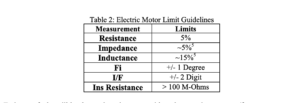
5.2 Avaliação de máquinas rotativas de indução trifásicas
O estator e o rotor são avaliados separadamente utilizando técnicas de análise de circuitos de enrolamento. As orientações que se seguem abrangem ambas as situações.
5.2.1 Ensaio do rotor do motor montado
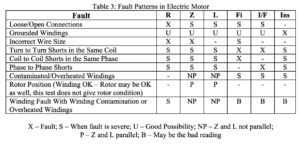
Os tipos de falhas comuns aos rotores de motores eléctricos são:
a) Folga de ar (excentricidade do rotor): Normalmente não é uma falha progressiva, a não ser que haja folga no rotor, ou que uma falha no veio do motor ou nos rolamentos se tenha tornado grave. Os problemas de folga, rolamentos e veios do motor podem ser detectados mais rapidamente e de forma mais segura, utilizando técnicas de análise de vibrações. Os problemas de folga de ar no fabrico e na reparação podem ser detectados com a análise do circuito de enrolamento estático durante os ensaios de aceitação ou no fabricante/loja de reparação antes do tempo perdido na instalação do equipamento. Este tipo de ensaio de aceitação é utilizado para determinar se a folga de ar foi corretamente ajustada (+/- 10% da leitura média da folga de ar tomada em cada extremidade do rotor durante a instalação).4
b) Vazios de fundição e ligações da barra do rotor: Que podem evoluir para defeitos de “quebra da barra do rotor” ao longo do tempo. Existem sempre vazios de fundição nos rotores de alumínio fundido, variações na liga de alumínio e variações nas juntas das barras de liga de cobre que afectam a indutância. As falhas podem ser detectadas através de uma série de leituras de indutância ou impedância do circuito à medida que o eixo é rodado 360 graus. Estas leituras podem ser representadas graficamente como uma forma de onda e visualizadas quanto a falhas, observando a posição das alterações de indutância e/ou impedância da forma de onda. Uma pequena alteração na inclinação ou no declive da forma de onda indica um defeito pequeno, normalmente não intrusivo, enquanto uma alteração significativa no pico da forma de onda indica falhas graves no rotor. As falhas graves podem interferir com as características de funcionamento do motor.
c) Quebra de barras do rotor: São falhas progressivas que ocorrem normalmente devido ao funcionamento incorreto do motor elétrico. Quando um motor elétrico arranca, o calor acumula-se no rotor devido às altas correntes e à alta frequência, exigindo um período de arrefecimento. Noutros casos, um rotor pode ficar parado, causando correntes elevadas e frequências elevadas do rotor. A taxa de expansão das ligas de cobre (ou alumínio) e os materiais do rotor são diferentes, colocando tensões mecânicas nas próprias barras. Sob tensão extrema, as barras do rotor podem rachar, reduzindo a capacidade do motor para produzir binário. Quando as barras do rotor se fracturam, as barras do rotor circundantes transportam corrente adicional, provocando um aumento adicional das temperaturas das barras do rotor e a possibilidade de ocorrência de fissuras adicionais.
A capacidade do equipamento de ensaio para detetar falhas através da indutância e da impedância deve-se a alterações na indutância mútua do circuito à medida que a posição do rotor se altera. Como um motor elétrico é um transformador com um circuito secundário rotativo, quando a posição do rotor muda, a relação efectiva entre o primário (enrolamentos do estator) e o secundário (enrolamentos do rotor) muda e a indutância mútua global e a impedância do circuito resultante mudam. Devido à natureza do equipamento rotativo, as alterações ao longo do tempo serão sinusoidais (ou alguma variação) e simétricas.
O processo geral para efetuar um ensaio de indutância ou impedância do rotor consiste em efetuar leituras de indutância ou impedância em incrementos regulares ao longo de 360 graus de rotação, ou utilizando um ensaio baseado na indutância ou impedância em tempo real. Os resultados dos testes devem ser representados graficamente para efeitos de interpretação.
5.2.2 Ensaio de estator de equipamento rotativo montado
A avaliação dos resultados dos ensaios de equipamentos rotativos montados proporcionará diferentes graus de precisão na deteção de falhas. Por exemplo, os resultados do ensaio de indutância fornecerão valores elevados e variáveis à medida que o rotor é colocado em posições diferentes, pelo que a posição do rotor tem de ser ajustada de modo a que os valores de indutância mútua entre os enrolamentos primário (estator) e secundário (rotor) sejam relativamente iguais. No entanto, a indutância associada à impedância mostra o impacto capacitivo da rutura do isolamento ou da contaminação do enrolamento. Por exemplo, se a impedância e a indutância forem relativamente paralelas, o desequilíbrio de fase seria devido à posição do rotor. Se se verificar uma redução da impedância de pelo menos uma fase, ou se a impedância e a indutância não forem relativamente paralelas, então a capacitância do circuito alterou-se, indicando uma possível contaminação do enrolamento ou uma rutura do isolamento.
As falhas iniciais de rotação serão detectadas como alterações no ângulo de fase ou na resposta de corrente/frequência como uma “mudança” nas leituras. Uma deslocação pode ser indicada, por exemplo, como Fi: 77/76/77 e/ou I/F: -44/-46/- 44.
5 As leituras de desequilíbrio de resistência e impedância só podem ser contadas se a posição do rotor for contabilizada. As leituras devem ser efectuadas num pico ou num vale da onda sinusoidal da mudança de posição do rotor.
6.0 Bibliografia
a) IEEE Std 43-2000: IEEE Recommended Practice for Testing Insulation Resistance of Rotating Machinery (Prática recomendada pelo IEEE para testar a resistência de isolamento de máquinas rotativas)
b) IEEE Std 56-1977: Guia do IEEE para a manutenção do isolamento de grandes máquinas rotativas de corrente alternada (10 000 kVA e maiores)
c) IEEE Std 118-1978: Código de teste padrão IEEE para medições de resistência
d) IEEE Std 120-1989: IEEE Master Test Guide for Electrical Measurements in Power Circuits
e) IEEE Std 388-1992: IEEE Standard for Transformers and Inductors in Electronic Power Conversion Equipment
f) IEEE Std 389-1996: IEEE Recommended Practice for Testing Electronic Transformers and Inductors
g) IEEE Std 1068-1990: IEEE Recommended Practice for the Repair and Rewinding of Motors for the Oil and Chemical Industries
h) Penrose, Dr. Howard W., Motor Circuit Analysis: Theory, Application, and Energy Analysis, SUCCESS by DESIGN, 2001
i) Fink, Donald and Beaty, H. Wayne, Standard Handbook for Electrical Engineers, Fourteenth Edition, McGraw-Hill, 2000.
j) Sarma, Mulukutl, Electric Machines: Steady-State Theory and Dynamic Performance, Second Edition, PWS Publishing Company, 1996
k) Mazur, Glen and Proctor, Thomas, Troubleshooting Electric Motors, Second Edition, ATP Publishing, 1997
l) Nasar, Syed, Electric Machines and ElectroMagnetics, McGraw-Hill, 1981

AT34™
Analise e faça a tendência da integridade dos componentes do motor em relação a falhas de aterramento, falhas de enrolamento interno, conexões abertas e contaminação – tudo isso com um dispositivo portátil.

Seminário Online de Diagnóstico Automóvel de Classe Mundial – Nível 1 – 12 a 16 de Junho
Já ouviste falar? Realizaremos o nosso Seminário de Diagnóstico Automóvel de Classe Mundial Nível 1 de 12 a 16 de Junho. Trata-se de um seminário em linha/virtual que começa todos […]

Preconlube 15-16 de Junho de 2023 Leon, México
Junte-se à Directora Regional LATAM da ATP, Gloria Urizar, na sua apresentação no Preconlub 2023! Mais pormenores: https://www.preconlub.com/ Glória Urizar Gerente Regional – […]