ਇਲੈਕਟ੍ਰੀਕਲ ਹਸਤਾਖਰ ਵਿਸ਼ਲੇਸ਼ਣ ਬਨਾਮ ਵਾਈਬ੍ਰੇਸ਼ਨ ਵਿਸ਼ਲੇਸ਼ਣ
ਸਾਰ:
ਇਹ ਚੰਗੀ ਤਰ੍ਹਾਂ ਜਾਣਿਆ ਜਾਂਦਾ ਹੈ ਕਿ ਘੁੰਮਣ ਵਾਲੀ ਮਸ਼ੀਨਰੀ ਖਾਸ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਨੂੰ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰਦੀ ਹੈ ਜਦੋਂ ਨੁਕਸ ਸ਼ਾਫਟ ਦੀ ਜਿਓਮੈਟ੍ਰਿਕ ਸੈਂਟਰਲਾਈਨ ਨੂੰ ਸਮੇਂ-ਸਮੇਂ ‘ਤੇ ਹਿਲਾਉਣ ਦਾ ਕਾਰਨ ਬਣਦੇ ਹਨ। 70 ਸਾਲਾਂ ਤੋਂ ਵੱਧ ਸਮੇਂ ਤੋਂ, ਮਸ਼ੀਨਰੀ ਵਾਈਬ੍ਰੇਸ਼ਨ ਵਿਸ਼ਲੇਸ਼ਣ (MVA) ਦੀ ਵਰਤੋਂ ਇਹਨਾਂ ਨੁਕਸਾਂ ਦੀ ਗੰਭੀਰਤਾ ਨੂੰ ਪਛਾਣਨ ਅਤੇ ਨਿਰਧਾਰਤ ਕਰਨ ਲਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ ਅਤੇ ਇਹ ਬਹੁਤ ਸਾਰੇ ਸਫਲ ਪਲਾਂਟ ਭਰੋਸੇਯੋਗਤਾ ਪ੍ਰੋਗਰਾਮਾਂ ਦਾ ਇੱਕ ਅਨਿੱਖੜਵਾਂ ਅੰਗ ਹੈ। ਹਾਲੀਆ ਤਜਰਬੇ ਅਤੇ ਖੋਜ ਨੇ ਇਹ ਸਿੱਧ ਕੀਤਾ ਹੈ ਕਿ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨੇਚਰ ਐਨਾਲਿਸਿਸ (ESA) ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਇਹਨਾਂ ਵਿੱਚੋਂ ਬਹੁਤ ਸਾਰੇ ਨੁਕਸ ਪਛਾਣੇ ਜਾ ਸਕਦੇ ਹਨ। ESA ਪਲਾਂਟ ਵਿੱਚ ਆਉਣ ਵਾਲੀ ਪਾਵਰ, ਮੋਟਰ ਨੂੰ ਸਪਲਾਈ ਕੀਤੀ ਬਿਜਲੀ, ਨਾਲ ਹੀ ਮੋਟਰ ਸਿਸਟਮ ਦੇ ਅੰਦਰ ਇਲੈਕਟ੍ਰੀਕਲ ਅਤੇ ਮਕੈਨੀਕਲ ਨੁਕਸਾਂ ਦਾ ਮੁਲਾਂਕਣ ਅਤੇ ਪਛਾਣ ਕਰਦਾ ਹੈ। ਇਸ ਤੋਂ ਇਲਾਵਾ, ESA ਕੁਝ ਇਲੈਕਟ੍ਰੀਕਲ ਭਰੋਸੇਯੋਗਤਾ ਪ੍ਰੋਗਰਾਮਾਂ ਦੇ ਅੰਦਰ ਇੱਕ ਬਹੁਤ ਮਹੱਤਵਪੂਰਨ ਤਕਨਾਲੋਜੀ ਵਜੋਂ ਉੱਭਰ ਰਿਹਾ ਹੈ। ਕੁਝ ਪੌਦੇ ਇਸ ਨੂੰ ਮਸ਼ੀਨਾਂ ‘ਤੇ ਇਲੈਕਟ੍ਰੀਕਲ ਅਤੇ ਮਕੈਨੀਕਲ ਸਮੱਸਿਆਵਾਂ ਦੀ ਪਛਾਣ ਕਰਨ ਲਈ ਮੁੱਖ ਖੋਜ ਸਾਧਨ ਵਜੋਂ ਵਰਤ ਰਹੇ ਹਨ, ਜੋ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰਾਂ ਦੁਆਰਾ ਚਲਾਈਆਂ ਜਾਂਦੀਆਂ ਹਨ। ਇਹ ਪੇਪਰ ਇਹਨਾਂ ਦੋਨਾਂ ਗਤੀਸ਼ੀਲ ਭਵਿੱਖਬਾਣੀ ਮੇਨਟੇਨੈਂਸ ਪ੍ਰੋਗਰਾਮ (PdM) ਤਕਨਾਲੋਜੀਆਂ ਦੀ ਜਾਂਚ ਕਰੇਗਾ ਅਤੇ ਹਰੇਕ ਤਕਨਾਲੋਜੀ ਦੀਆਂ ਸ਼ਕਤੀਆਂ ਅਤੇ ਕਮਜ਼ੋਰੀਆਂ ਦੀ ਪਛਾਣ ਕਰੇਗਾ ਅਤੇ ਇਹ ਨਿਰਧਾਰਤ ਕਰਨ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰੇਗਾ ਕਿ ਇਹ ਦੋਵੇਂ ਤਕਨਾਲੋਜੀ ਭਰੋਸੇਯੋਗਤਾ ਪ੍ਰੋਗਰਾਮ ਵਿੱਚ ਕਿੱਥੇ ਸਭ ਤੋਂ ਵਧੀਆ ਫਿੱਟ ਹਨ।
ਮੁੱਖ ਸ਼ਬਦ: ਡੈਮੋਡ ਸਪੈਕਟ੍ਰਮ; ਖੋਜ ਪੜਾਅ; ਇਲੈਕਟ੍ਰੀਕਲ ਦਸਤਖਤ ਵਿਸ਼ਲੇਸ਼ਣ; FFT ਵਿਸ਼ਲੇਸ਼ਣ; ਮਸ਼ੀਨਰੀ ਵਾਈਬ੍ਰੇਸ਼ਨ; ਮੋਟਰ ਸਿਸਟਮ ਨੁਕਸ; ਰੋਟਰ ਇਲੈਕਟ੍ਰੀਕਲ; ਸਟੇਟਰ ਇਲੈਕਟ੍ਰੀਕਲ.
ਰੱਖ-ਰਖਾਅ ਦੇ ਫ਼ਲਸਫ਼ੇ:
ਪੂੰਜੀ ਸਾਜ਼ੋ-ਸਾਮਾਨ ਦੀ ਵੱਡੀ ਆਬਾਦੀ ਵਾਲੀਆਂ ਕੰਪਨੀਆਂ ਜਾਂ ਤਾਂ ਸੇਵਾ ਪ੍ਰਦਾਨ ਕਰਦੀਆਂ ਹਨ ਜਾਂ ਇਸ ਬਹੁਤ ਜ਼ਿਆਦਾ ਪੂੰਜੀ-ਸੰਬੰਧੀ ਉਪਕਰਣਾਂ ਨਾਲ ਉਤਪਾਦ ਤਿਆਰ ਕਰਦੀਆਂ ਹਨ। ਇਸ ਸਾਜ਼-ਸਾਮਾਨ ਦੀ ਰੱਖਿਆ ਕਰਨ ਅਤੇ ਇਸਨੂੰ ਓਪਰੇਟਿੰਗ ਕ੍ਰਮ ਵਿੱਚ ਰੱਖਣ ਲਈ, ਇਸਦੀ ਦੇਖਭਾਲ ਕਰਨਾ ਜ਼ਰੂਰੀ ਹੈ. ਦਬਾਅ, ਸਮੇਂ ਦੇ ਨਾਲ, ਉੱਚ ਮੁਨਾਫਾ ਕਮਾਉਣ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰਦੇ ਹੋਏ, ਘੱਟ ਕੀਮਤ ‘ਤੇ ਉੱਚ ਗੁਣਵੱਤਾ ਵਾਲੇ ਉਤਪਾਦਾਂ ਦਾ ਉਤਪਾਦਨ ਕਰਨ ਲਈ ਕੰਪਨੀਆਂ ‘ਤੇ ਜਾਰੀ ਰਹਿੰਦਾ ਹੈ। ਸੇਵਾ ਪ੍ਰਦਾਤਾਵਾਂ ਨੂੰ ਵੀ ਬਹੁਤ ਘੱਟ ਕੀਮਤ ‘ਤੇ ਵਧੇਰੇ ਭਰੋਸੇਯੋਗ ਸੇਵਾਵਾਂ ਪ੍ਰਦਾਨ ਕਰਨ ਦੇ ਅਧੀਨ ਹਨ। ਇਸ ਲਈ ਰੱਖ-ਰਖਾਅ ਵਿਭਾਗ ਨੂੰ ਨਾ ਸਿਰਫ਼ ਇਸ ਉਪਕਰਨ ਦੀ ਸਹੀ ਢੰਗ ਨਾਲ ਸਾਂਭ-ਸੰਭਾਲ ਕਰਨੀ ਚਾਹੀਦੀ ਹੈ, ਸਗੋਂ ਇਸ ਨੂੰ ਘੱਟ ਕੀਮਤ ‘ਤੇ ਕਰਨਾ ਚਾਹੀਦਾ ਹੈ।
ਇਹਨਾਂ ਦਬਾਅ ਨੇ ਰੱਖ-ਰਖਾਅ ਦੇ ਅਭਿਆਸਾਂ ਜਾਂ ਫ਼ਲਸਫ਼ਿਆਂ ਦੇ ਵਿਕਾਸ ਵੱਲ ਅਗਵਾਈ ਕੀਤੀ ਹੈ। ਮੁਢਲੇ ਰੱਖ-ਰਖਾਅ ਦੇ ਅਭਿਆਸਾਂ ਨੂੰ “ਫੇਲ ਹੋਣ ਤੱਕ ਚਲਾਓ” (RTF) ਵਜੋਂ ਜਾਣਿਆ ਜਾਂਦਾ ਸੀ, ਪਰ ਉਦਯੋਗ ਦੇ ਦਬਾਅ ਨੇ ਇਹਨਾਂ ਅਭਿਆਸਾਂ ਨੂੰ ਸ਼ੁੱਧਤਾ (ਜਾਂ ਕਿਰਿਆਸ਼ੀਲ) ਰੱਖ-ਰਖਾਅ ਲਈ ਵਿਕਸਿਤ ਕੀਤਾ ਹੈ।
ਇਹਨਾਂ ਰੱਖ-ਰਖਾਵ ਦੇ ਦਰਸ਼ਨਾਂ ਅਤੇ ਖਰਚਿਆਂ ਦੀ ਇੱਕ ਸੰਖੇਪ ਸਮੀਖਿਆ ਇਹਨਾਂ ਅਭਿਆਸਾਂ ਦੇ ਵਿਕਾਸ ਦੀ ਲੋੜ ਦੀ ਵਿਆਖਿਆ ਕਰ ਸਕਦੀ ਹੈ। RTF, ਰੋਕਥਾਮ ਅਤੇ ਭਵਿੱਖਬਾਣੀ ਰੱਖ-ਰਖਾਅ ਦੇ ਇਹ ਖਰਚੇ 1970 ਦੇ ਦਹਾਕੇ ਦੇ ਅਖੀਰ ਵਿੱਚ ਦੱਖਣੀ ਅਮਰੀਕਾ ਵਿੱਚ ਇੱਕ ਰਿਫਾਇਨਰੀ ਤੋਂ ਪ੍ਰਕਾਸ਼ਿਤ ਇੱਕ ਲੇਖ ਤੋਂ ਕੱਢੇ ਗਏ ਸਨ ਜਿਸ ਨੇ ਇਸ ਵਿਕਾਸ ਦੁਆਰਾ ਉਹਨਾਂ ਦੇ ਰੱਖ-ਰਖਾਅ ਦੇ ਖਰਚਿਆਂ ਨੂੰ ਟਰੈਕ ਕੀਤਾ ਅਤੇ ਪ੍ਰਕਾਸ਼ਿਤ ਕੀਤਾ। 1990 ਦੇ ਦਹਾਕੇ ਦੇ ਸ਼ੁਰੂ ਵਿੱਚ ਪ੍ਰੀਸੀਜ਼ਨ ਮੇਨਟੇਨੈਂਸ ਨੂੰ ਲਾਗੂ ਕਰਨ ਵਾਲੇ ਬਹੁਤ ਸਾਰੇ ਪੌਦਿਆਂ ਦੇ ਨਤੀਜਿਆਂ ਦੇ ਆਧਾਰ ‘ਤੇ ਰਹਿਣ-ਸਹਿਣ ਦੀ ਲਾਗਤ ਲਈ ਸ਼ੁੱਧਤਾ ਦੀਆਂ ਲਾਗਤਾਂ ਨੂੰ ਜੋੜਿਆ ਅਤੇ ਐਡਜਸਟ ਕੀਤਾ ਗਿਆ ਸੀ।
ਫੇਲ ਹੋਣ ਤੱਕ ਚਲਾਓ ($17 -18/HP/YR):
ਇਸ ਪਹੁੰਚ ਲਈ ਮਸ਼ੀਨ ਨੂੰ ਚਾਲੂ ਅਤੇ ਬੰਦ ਕਰਨ ਅਤੇ ਉਤਪਾਦ ਦੀ ਸਪਲਾਈ ਕਰਨ ਤੋਂ ਇਲਾਵਾ ਥੋੜ੍ਹੀ ਜਿਹੀ ਸ਼ਮੂਲੀਅਤ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ। ਇਸ ਤਰ੍ਹਾਂ ਮਸ਼ੀਨਾਂ ਬਿਨਾਂ ਕਿਸੇ ਰੁਕਾਵਟ ਦੇ ਚੱਲਦੀਆਂ ਰਹਿੰਦੀਆਂ ਹਨ। ਹਾਲਾਂਕਿ, ਜਦੋਂ ਅਸਫਲਤਾ ਹੁੰਦੀ ਹੈ ਤਾਂ ਉਹ ਆਮ ਤੌਰ ‘ਤੇ ਬਹੁਤ ਗੰਭੀਰ ਹੁੰਦੇ ਹਨ ਅਤੇ ਨਤੀਜੇ ਵਜੋਂ ਅਸਲ ਹਿੱਸੇ ਦੇ ਨਾਲ-ਨਾਲ ਉਸ ਮਸ਼ੀਨ ਦੇ ਹੋਰ ਹਿੱਸਿਆਂ ਨੂੰ ਨੁਕਸਾਨ ਪਹੁੰਚਾਉਂਦੇ ਹਨ, ਜਿਵੇਂ ਕਿ ਜੁੜੀਆਂ ਮਸ਼ੀਨਾਂ ਅਤੇ ਫਾਊਂਡੇਸ਼ਨ। ਇਹ ਵਾਧੂ ਨੁਕਸਾਨ ਅਕਸਰ ਕੰਪੋਨੈਂਟਾਂ ਨੂੰ ਨੁਕਸਾਨ ਪਹੁੰਚਾਉਂਦਾ ਹੈ, ਜੋ ਆਮ ਤੌਰ ‘ਤੇ ਅਸਫਲ ਨਹੀਂ ਹੁੰਦੇ, ਅਤੇ ਕਦੇ-ਕਦਾਈਂ ਪੌਦੇ ਦੇ ਸਪੇਅਰਜ਼ ਵਿੱਚ ਪਾਏ ਜਾਂਦੇ ਹਨ।
ਇਹਨਾਂ ਕੰਪੋਨੈਂਟਸ ਦੀ ਮੁਰੰਮਤ ਜਾਂ ਬਦਲੀ ਕਰਨ ਲਈ ਇਹਨਾਂ ਨੂੰ ਘਰ-ਘਰ ਬਣਾਉਣਾ ਜਾਂ ਉਹਨਾਂ ਨੂੰ ਮੂਲ ਨਿਰਮਾਤਾ ਤੋਂ ਪ੍ਰੀਮੀਅਮ ਲਾਗਤ ਅਤੇ ਲੰਬੇ ਲੀਡ ਸਮੇਂ ‘ਤੇ ਖਰੀਦਣ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ, ਇਸ ਤਰ੍ਹਾਂ ਲੰਬੇ ਸਮੇਂ ਤੱਕ ਬੰਦ ਹੋਣ ਦਾ ਨਤੀਜਾ ਹੁੰਦਾ ਹੈ। ਇਸਲਈ, RTF ਪਲਾਂਟ ਸਾਜ਼ੋ-ਸਾਮਾਨ ਦੀ ਸਾਂਭ-ਸੰਭਾਲ ਦਾ ਸਭ ਤੋਂ ਮਹਿੰਗਾ ਤਰੀਕਾ ਹੈ। ਇਹ ਗੁਆਚੀਆਂ ਉਤਪਾਦਨ ਲਾਗਤਾਂ ‘ਤੇ ਵਿਚਾਰ ਕੀਤੇ ਬਿਨਾਂ ਹੈ। ਇਹ ਲਾਗਤਾਂ ਦਾ ਅਨੁਮਾਨ ਲਗਾਉਣਾ ਅਤੇ ਮਾਪਣਾ ਬਹੁਤ ਔਖਾ ਹੈ, ਪਰ ਤਜਰਬੇ ਨੇ ਦਿਖਾਇਆ ਹੈ ਕਿ ਵਧੇ ਹੋਏ ਰੱਖ-ਰਖਾਅ ਦੇ ਖਰਚੇ ਆਮ ਤੌਰ ‘ਤੇ ਵਾਧੂ ਡਾਊਨਟਾਈਮ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਹੁੰਦੇ ਹਨ।
ਰੋਕਥਾਮ ਸੰਭਾਲ ($11-12/HP/YR):
ਇਹ ਰੱਖ-ਰਖਾਅ ਦਾ ਫਲਸਫਾ ਇਸ ਧਾਰਨਾ ‘ਤੇ ਅਧਾਰਤ ਹੈ ਕਿ ਮਕੈਨੀਕਲ ਉਪਕਰਣ ਸਮੇਂ ਦੇ ਨਾਲ ਪਹਿਨਣਗੇ ਅਤੇ ਅਸਫਲ ਹੋ ਜਾਣਗੇ। ਮਸ਼ੀਨ ਡਿਜ਼ਾਈਨਰ ਅਤੇ ਨਿਰਮਾਤਾ, ਉਹਨਾਂ ਦੀਆਂ ਮਸ਼ੀਨਾਂ ਲਈ ਸਿਫਾਰਸ਼ ਕੀਤੀਆਂ ਰੱਖ-ਰਖਾਅ ਲੋੜਾਂ ਅਤੇ ਨਿਰੀਖਣ ਅੰਤਰਾਲਾਂ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰਨ ਲਈ ਉਹਨਾਂ ਦੀਆਂ ਮਸ਼ੀਨਾਂ ਦੀ ਖੋਜ ਅਤੇ ਅਧਿਐਨ ਕਰਦੇ ਹਨ। ਸਿਫਾਰਸ਼ ਕੀਤੇ ਰੱਖ-ਰਖਾਅ ਅਤੇ ਨਿਰੀਖਣ ਫਿਰ ਇਹਨਾਂ ਪੂਰਵ-ਨਿਰਧਾਰਤ ਸਮੇਂ ਦੇ ਅੰਤਰਾਲਾਂ ‘ਤੇ ਕੀਤੇ ਜਾਂਦੇ ਹਨ।
ਹਾਲਾਂਕਿ, 1980 ਦੇ ਦਹਾਕੇ ਦੇ ਮੱਧ ਵਿੱਚ ਨੋਲਨ ਅਤੇ ਹੀਪ ਦੁਆਰਾ ਲਿਖੇ ਗਏ ਇੱਕ ਭਰੋਸੇਯੋਗਤਾ ਅਧਿਐਨ ਨੇ ਇਹ ਨਿਰਧਾਰਤ ਕੀਤਾ ਕਿ ਮਸ਼ੀਨਾਂ ਸਮੇਂ ਸਿਰ ਫੇਲ ਨਹੀਂ ਹੁੰਦੀਆਂ ਹਨ। ਉਹ ਜਾਂ ਤਾਂ ਬਹੁਤ ਜਲਦੀ ਜਾਂ ਬਹੁਤ ਦੇਰ ਨਾਲ ਅਸਫਲ ਹੋ ਜਾਂਦੇ ਹਨ. ਜਿਹੜੀਆਂ ਮਸ਼ੀਨਾਂ ਬਹੁਤ ਜਲਦੀ ਫੇਲ੍ਹ ਹੋ ਜਾਂਦੀਆਂ ਹਨ ਉਹਨਾਂ ਵਿੱਚ “ਫੇਲ ਹੋਣ ਤੱਕ ਚੱਲਣ” ਦੇ ਰੱਖ-ਰਖਾਅ ਨਾਲ ਜੁੜੀਆਂ ਉਹੀ ਸਮੱਸਿਆਵਾਂ ਅਤੇ ਖਰਚੇ ਹੁੰਦੇ ਹਨ, ਜਦੋਂ ਕਿ ਬਹੁਤ ਦੇਰ ਨਾਲ ਫੇਲ ਹੋਣ ਵਾਲੀਆਂ ਮਸ਼ੀਨਾਂ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਕਈ ਘੰਟਿਆਂ ਦੀ ਬੇਲੋੜੀ ਦੇਖਭਾਲ ਅਤੇ ਸਮੇਂ ਤੋਂ ਪਹਿਲਾਂ ਕੰਪੋਨੈਂਟਸ ਬਦਲ ਜਾਂਦੇ ਹਨ। ਸਭ ਤੋਂ ਮਹੱਤਵਪੂਰਨ ਗੱਲ ਇਹ ਹੈ ਕਿ ਇਸ ਅਧਿਐਨ ਨੇ ਇਹ ਨਿਰਧਾਰਤ ਕੀਤਾ ਹੈ ਕਿ ਸਿਰਫ 11% ਮਸ਼ੀਨ ਅਸਫਲਤਾਵਾਂ ਉਮਰ ਨਾਲ ਸਬੰਧਤ ਸਨ ਅਤੇ 89% ਕੁਦਰਤ ਵਿੱਚ ਵਧੇਰੇ ਬੇਤਰਤੀਬ ਸਨ। ਇਸਦਾ ਮੂਲ ਰੂਪ ਵਿੱਚ ਮਤਲਬ ਹੈ ਕਿ ਨਿਵਾਰਕ ਰੱਖ-ਰਖਾਅ 11% ਅਸਫਲਤਾਵਾਂ ਲਈ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਹੈ, ਪਰ 89% ਲਈ ਬੇਅਸਰ ਹੈ। ਉਹਨਾਂ ਨੇ ਇਹ ਵੀ ਦੱਸਿਆ ਕਿ ਮਸ਼ੀਨ ਦੀ ਸਥਾਪਨਾ ਜਾਂ ਮੁਰੰਮਤ ਤੋਂ ਤੁਰੰਤ ਬਾਅਦ 68% ਅਸਫਲਤਾਵਾਂ ਹੁੰਦੀਆਂ ਹਨ, ਇਸ ਮਿਆਦ ਨੂੰ ਅਕਸਰ ਬਰੇਕ-ਇਨ ਪੀਰੀਅਡ ਕਿਹਾ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਜਿੰਨੀ ਜ਼ਿਆਦਾ ਗੁੰਝਲਦਾਰ ਮਸ਼ੀਨ ਬ੍ਰੇਕ ਦੌਰਾਨ ਮਸ਼ੀਨ ਦੇ ਫੇਲ੍ਹ ਹੋਣ ਦੀ ਜ਼ਿਆਦਾ ਸੰਭਾਵਨਾ ਹੁੰਦੀ ਹੈ- ਮਿਆਦ ਵਿੱਚ.
ਭਵਿੱਖਬਾਣੀ ਸੰਭਾਲ ($7-8/HP/YR):
ਸਥਿਤੀ ਦੀ ਨਿਗਰਾਨੀ ਦੀ ਵਰਤੋਂ ਦੁਆਰਾ ਰੱਖ-ਰਖਾਅ ਦੇ ਖਰਚਿਆਂ ਵਿੱਚ ਇੱਕ ਵਾਧੂ ਕਮੀ ਪ੍ਰਾਪਤ ਕੀਤੀ ਗਈ ਸੀ। 1960 ਦੇ ਦਹਾਕੇ ਦੇ ਸ਼ੁਰੂ ਵਿੱਚ ਕੰਪਨੀਆਂ ਨੇ ਮਾਨਤਾ ਦਿੱਤੀ ਕਿ ਜਦੋਂ ਰੋਟੇਟਿੰਗ ਸਾਜ਼ੋ-ਸਾਮਾਨ ਫੇਲ੍ਹ ਹੋਣਾ ਸ਼ੁਰੂ ਹੋ ਗਿਆ, ਤਾਂ ਇਸ ਦੀਆਂ ਸੰਚਾਲਨ ਸਥਿਤੀਆਂ ਬਦਲ ਜਾਣਗੀਆਂ। ਇਹਨਾਂ ਓਪਰੇਟਿੰਗ ਹਾਲਤਾਂ ਦੀ ਨਿਯਮਤ ਤੌਰ ‘ਤੇ ਨਿਗਰਾਨੀ ਕਰਨ ਦੁਆਰਾ, ਇਹਨਾਂ ਤਬਦੀਲੀਆਂ ਦੀ ਇੱਕ ਉੱਨਤ ਚੇਤਾਵਨੀ ਘਾਤਕ ਅਸਫਲਤਾ ਹੋਣ ਤੋਂ ਪਹਿਲਾਂ, ਮਸ਼ੀਨ ਨੂੰ ਓਪਰੇਸ਼ਨ ਤੋਂ ਹਟਾਉਣ ਲਈ ਕਾਫ਼ੀ ਸਮਾਂ ਪ੍ਰਦਾਨ ਕਰਦੀ ਹੈ।
1980 ਦੇ ਦਹਾਕੇ ਦੇ ਸ਼ੁਰੂ ਤੋਂ ਮਾਈਕ੍ਰੋਪ੍ਰੋਸੈਸਰ ਅਧਾਰਤ ਡਾਟਾ-ਕੁਲੈਕਟਰਾਂ ਦੀ ਸ਼ੁਰੂਆਤ ਨਾਲ ਇਹ ਰੱਖ-ਰਖਾਅ ਦਾ ਫਲਸਫਾ ਵਧਿਆ ਹੈ। ਇੱਕ ਮਸ਼ੀਨ ਦੀਆਂ ਓਪਰੇਟਿੰਗ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਜਿਵੇਂ ਕਿ ਤਾਪਮਾਨ, ਦਬਾਅ, ਤੇਲ ਦੀ ਸਥਿਤੀ, ਵਾਈਬ੍ਰੇਸ਼ਨ ਅਤੇ ਪ੍ਰਦਰਸ਼ਨ ਨੂੰ ਮਾਪਿਆ ਜਾ ਸਕਦਾ ਹੈ ਅਤੇ ਤਬਦੀਲੀਆਂ ਦੀ ਪਛਾਣ ਕਰਨ ਲਈ ਰੁਝਾਨ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ। ਕੁਝ ਮਾਮਲਿਆਂ ਵਿੱਚ ਇਹਨਾਂ ਮਾਪਾਂ ਦੀ ਪੂਰਵ-ਨਿਰਧਾਰਤ ਮੁੱਲਾਂ ਨਾਲ ਤੁਲਨਾ ਕਰਨ ਨਾਲ ਮਸ਼ੀਨ ਦੀ ਸਥਿਤੀ ਨੂੰ ਬਿਨਾਂ ਰੁਝਾਨ ਦੇ ਤੇਜ਼ੀ ਨਾਲ ਪਛਾਣਿਆ ਜਾ ਸਕਦਾ ਹੈ। ਇਸ ਨਾਲ ਭਵਿੱਖਬਾਣੀ ਰੱਖ-ਰਖਾਅ ਪ੍ਰੋਗਰਾਮਾਂ (PdM) ਦੀ ਤੇਜ਼ੀ ਨਾਲ ਸਵੀਕ੍ਰਿਤੀ ਅਤੇ ਲਾਗੂ ਹੋਣ ਦਾ ਕਾਰਨ ਬਣਿਆ। ਭਵਿੱਖਬਾਣੀ ਰੱਖ-ਰਖਾਅ ਮਸ਼ੀਨ ਦੀਆਂ ਸਥਿਤੀਆਂ ਦੀ ਪਛਾਣ ਕਰਨ ਲਈ ਵੱਖ-ਵੱਖ ਮਸ਼ੀਨ ਮਾਪਾਂ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ। ਇੱਥੇ ਬਹੁਤ ਸਾਰੀਆਂ ਵੱਖ-ਵੱਖ PdM ਤਕਨਾਲੋਜੀਆਂ ਹਨ ਅਤੇ ਸਭ ਤੋਂ ਸਫਲ ਪ੍ਰੋਗਰਾਮ ਸਭ ਤੋਂ ਵੱਧ ਜਾਣਕਾਰੀ ਪ੍ਰਦਾਨ ਕਰਨ ਲਈ ਕਈ ਤਕਨੀਕਾਂ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹਨ ਅਤੇ ਨਤੀਜੇ ਵਜੋਂ ਇੱਕ ਵਿਕਾਸਸ਼ੀਲ ਸਮੱਸਿਆ ਵਾਲੀ ਮਸ਼ੀਨ ਦੀ ਪਛਾਣ ਕਰਨ ਦੀ ਸਭ ਤੋਂ ਵੱਧ ਸੰਭਾਵਨਾ ਹੁੰਦੀ ਹੈ।
ਬਹੁਤ ਸਾਰੇ PdM ਪ੍ਰੋਗਰਾਮ “ਜੰਗਲਾਤ ਅੰਨ੍ਹੇਪਣ” (ਰੁੱਖਾਂ ਤੋਂ ਜੰਗਲ ਨਹੀਂ ਦੇਖ ਸਕਦੇ) ਦੇ ਦੋਸ਼ੀ ਹਨ। ਉਹ ਡੇਟਾ ਇਕੱਠਾ ਕਰਨ ਵਿੱਚ ਇੰਨਾ ਸਮਾਂ ਬਿਤਾਉਂਦੇ ਹਨ, ਕਿ ਉਹਨਾਂ ਕੋਲ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਨ ਲਈ ਸਮਾਂ ਨਹੀਂ ਹੁੰਦਾ ਜਾਂ ਉਹ “ਘੱਟ ਨਾਜ਼ੁਕ” ਮਸ਼ੀਨਾਂ ਨੂੰ ਨਜ਼ਰਅੰਦਾਜ਼ ਕਰਦੇ ਹਨ।
ਸਭ ਤੋਂ ਸਫਲ PdM ਪ੍ਰੋਗਰਾਮ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਸਕ੍ਰੀਨਿੰਗ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹਨ। ਖੋਜ ਪੜਾਅ ਦਾ ਟੀਚਾ “ਖਰਾਬ ਮਸ਼ੀਨਾਂ” ਦੀ ਪਛਾਣ ਕਰਨਾ ਹੈ। ਇੱਕ ਵਾਰ ਇੱਕ ਖ਼ਰਾਬ ਮਸ਼ੀਨ ਦੀ ਪਛਾਣ ਹੋ ਜਾਣ ਤੋਂ ਬਾਅਦ, ਮਸ਼ੀਨ ਦੀ ਸਥਿਤੀ ਨੂੰ ਬਦਲਣ ਦਾ ਕਾਰਨ ਕੀ ਹੈ, ਇਹ ਨਿਰਧਾਰਤ ਕਰਨ ਲਈ ਵਾਧੂ ਮਾਪਾਂ ਜਾਂ ਤਕਨਾਲੋਜੀਆਂ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ, ਅਤੇ ਫਿਰ ਮਸ਼ੀਨ ਨੂੰ ਚੰਗੀ ਸਥਿਤੀ ਵਿੱਚ ਵਾਪਸ ਰੱਖਣ ਲਈ ਉਚਿਤ ਸੁਧਾਰਾਤਮਕ ਕਾਰਵਾਈਆਂ ਕੀਤੀਆਂ ਜਾਂਦੀਆਂ ਹਨ। ਇਸ ਵਿਕਾਸ ਨੇ ਪੀਡੀਐਮ ਦੇ ਤਿੰਨ ਪੜਾਵਾਂ ਦੀ ਸਥਾਪਨਾ ਕੀਤੀ ਹੈ। ਤਿੰਨ ਪੜਾਅ ਖੋਜ, ਵਿਸ਼ਲੇਸ਼ਣ ਅਤੇ ਸੁਧਾਰ ਹਨ। ਕੁਝ ਪ੍ਰੋਗਰਾਮ ਇੱਕ ਚੌਥਾ ਪੜਾਅ ਜੋੜਦੇ ਹਨ, ਜੋ ਕਿ ਤਸਦੀਕ ਹੈ, ਹਾਲਾਂਕਿ ਮੇਰਾ ਮੰਨਣਾ ਹੈ ਕਿ ਤਸਦੀਕ ਸੁਧਾਰ ਪੜਾਅ ਦਾ ਹਿੱਸਾ ਹੈ।
ਕੁਝ ਸਭ ਤੋਂ ਆਮ PdM ਤਕਨੀਕਾਂ ਹਨ ਮਸ਼ੀਨਰੀ ਵਾਈਬ੍ਰੇਸ਼ਨ ਵਿਸ਼ਲੇਸ਼ਣ (MVA), ਇਨਫਰਾ-ਰੈੱਡ ਥਰਮੋਗ੍ਰਾਫੀ, ਅਲਟਰਾ-ਸੋਨਿਕਸ, ਤੇਲ ਵਿਸ਼ਲੇਸ਼ਣ, ਮੋਟਰ ਸਰਕਟ ਵਿਸ਼ਲੇਸ਼ਣ (MCA), ਅਤੇ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨੇਚਰ ਵਿਸ਼ਲੇਸ਼ਣ (ESA)। ਸਭ ਤੋਂ ਸਫਲ PdM ਤਕਨਾਲੋਜੀਆਂ ਵਿੱਚ ਆਮ ਵਿਸ਼ੇਸ਼ਤਾ ਇਹ ਹੈ ਕਿ ਉਹ ਪ੍ਰਦਰਸ਼ਨ ਕਰਨ ਵਿੱਚ ਅਸਾਨ ਹਨ, ਅਤੇ ਗੈਰ-ਵਿਨਾਸ਼ਕਾਰੀ, ਦੁਹਰਾਉਣ ਯੋਗ ਮਾਪ ਪ੍ਰਦਾਨ ਕਰਦੀਆਂ ਹਨ।
ਖੋਜ ਪੜਾਅ:
ਇਹ ਆਮ ਤੌਰ ‘ਤੇ ਸਭ ਤੋਂ ਮਹੱਤਵਪੂਰਨ ਪੜਾਅ ਹੁੰਦਾ ਹੈ ਅਤੇ ਪੂਰੇ PdM ਪ੍ਰੋਗਰਾਮ ਦਾ ਆਧਾਰ ਹੁੰਦਾ ਹੈ। ਖੋਜ ਪੜਾਅ ਵਿੱਚ ਚੁਣੇ ਗਏ ਉਪਕਰਣਾਂ ਦੀਆਂ ਸੰਚਾਲਨ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਦੀ ਸਮੇਂ-ਸਮੇਂ ‘ਤੇ ਨਿਗਰਾਨੀ ਕਰਨਾ ਸ਼ਾਮਲ ਹੁੰਦਾ ਹੈ। ਇਹ ਮੁੱਲ ਪ੍ਰਚਲਿਤ ਹਨ ਅਤੇ ਕਿਸੇ ਵੀ ਤਬਦੀਲੀ ਲਈ ਨਿਰੀਖਣ ਕੀਤੇ ਜਾਂਦੇ ਹਨ। ਵੱਧ ਤੋਂ ਵੱਧ ਮਸ਼ੀਨਾਂ ਦੀ ਨਿਗਰਾਨੀ ਕਰਨ ਦੇ ਇਰਾਦੇ ਨਾਲ, ਡਾਟਾ ਇਕੱਤਰ ਕਰਨ ਦੀ ਪ੍ਰਕਿਰਿਆ ਤੇਜ਼ੀ ਨਾਲ ਅਤੇ ਧਿਆਨ ਨਾਲ ਕੀਤੀ ਜਾਣੀ ਚਾਹੀਦੀ ਹੈ। ਜਦੋਂ ਇੱਕ ਤਬਦੀਲੀ ਦਾ ਪਤਾ ਲਗਾਇਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਮਸ਼ੀਨ ਦੀ ਸਥਿਤੀ ਵਿੱਚ ਤਬਦੀਲੀ ਦੇ ਕਾਰਨ ਦਾ ਪਤਾ ਲਗਾਉਣ ਲਈ, ਵਿਸ਼ਲੇਸ਼ਣ ਦੇ ਉਦੇਸ਼ਾਂ ਲਈ ਵਾਧੂ ਡੇਟਾ ਲਿਆ ਜਾਂਦਾ ਹੈ।
ਖੋਜ ਪੜਾਅ ਵਿੱਚ ਪੂਰਾ ਉਦੇਸ਼ ਉਨ੍ਹਾਂ ਮਸ਼ੀਨਾਂ ਦੀ ਪਛਾਣ ਕਰਨਾ ਹੈ ਜੋ ਅਸਫਲ ਹੋ ਰਹੀਆਂ ਹਨ। ਇਸਦਾ ਮਤਲਬ ਹੈ ਕਿ ਜਿੰਨੀਆਂ ਵੀ ਮਸ਼ੀਨਾਂ ਸੰਭਵ ਹੋ ਸਕੇ, ਘੱਟ ਸਮੇਂ ਵਿੱਚ ਸਕ੍ਰੀਨ ਕੀਤੀਆਂ ਜਾਂਦੀਆਂ ਹਨ। ਜ਼ਿਆਦਾਤਰ PdM ਸੌਫਟਵੇਅਰ ਪ੍ਰੋਗਰਾਮ ਫਿਰ ਇਕੱਠੇ ਕੀਤੇ ਡੇਟਾ ਨੂੰ ਦੇਖਦੇ ਹਨ ਅਤੇ ਸ਼ੱਕੀ ਮਸ਼ੀਨਾਂ ਦੀ ਪਛਾਣ ਕਰਦੇ ਹਨ।
ਵਿਸ਼ਲੇਸ਼ਣ ਪੜਾਅ:
ਇਸ ਪੜਾਅ ਵਿੱਚ ਖੋਜ ਪੜਾਅ ਨਾਲੋਂ ਵਾਧੂ ਅਤੇ ਸ਼ਾਇਦ ਵੱਖ-ਵੱਖ ਕਿਸਮਾਂ ਦੇ ਡੇਟਾ ਲੈਣਾ ਸ਼ਾਮਲ ਹੁੰਦਾ ਹੈ। ਇਸ ਵਾਧੂ ਡੇਟਾ ਲਈ ਆਮ ਤੌਰ ‘ਤੇ ਵਾਧੂ ਡੇਟਾ ਇਕੱਤਰ ਕਰਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ। ਕਿਉਂਕਿ ਸਿਰਫ ਕੁਝ ਮਸ਼ੀਨਾਂ, ਖੋਜ ਪੜਾਅ ਦੌਰਾਨ (ਕਿਤੇ ਇੱਕ ਪਰਿਪੱਕ ਪ੍ਰੋਗਰਾਮ ਵਿੱਚ 2% ਅਤੇ 3% ਦੇ ਵਿਚਕਾਰ) ਕੋਈ ਮਹੱਤਵਪੂਰਨ ਤਬਦੀਲੀ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰਦੀਆਂ ਹਨ, ਇਹ ਆਮ ਤੌਰ ‘ਤੇ ਖੋਜ ਪ੍ਰਕਿਰਿਆ ਦੌਰਾਨ ਤਬਦੀਲੀ ਦੀ ਪਛਾਣ ਕਰਨ ਲਈ ਲੋੜੀਂਦੇ ਡੇਟਾ ਨੂੰ ਤੇਜ਼ੀ ਨਾਲ ਲੈਣ ਲਈ ਵਧੇਰੇ ਸਮਾਂ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਹੁੰਦਾ ਹੈ, ਅਤੇ ਫੇਰ ਤਬਦੀਲੀ ਦਾ ਪਤਾ ਲੱਗਣ ਤੋਂ ਬਾਅਦ ਵਧੇਰੇ ਵਿਸਤ੍ਰਿਤ ਦ੍ਰਿਸ਼ ਲਈ ਵਾਪਸ ਜਾਓ।
ਹਾਲਾਂਕਿ, ਜੇਕਰ ਪਲਾਂਟ ਸਾਈਟ ਰਿਮੋਟ ਹੈ ਜਾਂ ਹੋਰ ਪਹੁੰਚ ਸੀਮਾਵਾਂ ਹਨ, ਤਾਂ ਖੋਜ ਪੜਾਅ ਦੌਰਾਨ ਵਧੇਰੇ ਵਿਸਤ੍ਰਿਤ ਡੇਟਾ ਲੈਣਾ ਜਾਇਜ਼ ਹੋਵੇਗਾ। ਬਹੁਤ ਸਾਰੇ ਪਲਾਂਟ ਅਤੇ ਸਾਈਟਾਂ ਇਹਨਾਂ ਐਪਲੀਕੇਸ਼ਨਾਂ ਲਈ ਸਥਾਈ ਤੌਰ ‘ਤੇ ਨਿਗਰਾਨੀ ਪ੍ਰਣਾਲੀਆਂ ਨੂੰ ਸਥਾਪਿਤ ਕਰਨ ਦਾ ਫੈਸਲਾ ਕਰਦੀਆਂ ਹਨ।
ਸੁਧਾਰ ਪੜਾਅ:
ਇਸ ਪੜਾਅ ਵਿੱਚ ਸਥਿਤੀ ਵਿੱਚ ਤਬਦੀਲੀ ਨੂੰ ਸ਼ੁਰੂ ਕਰਨ ਵਾਲੀ ਸਮੱਸਿਆ ਨੂੰ ਠੀਕ ਕਰਨਾ ਅਤੇ ਖ਼ਤਮ ਕਰਨਾ ਸ਼ਾਮਲ ਹੈ। ਇਸ ਲਈ ਪੱਖੇ ਦੀ ਸਫਾਈ, ਬੇਅਰਿੰਗ ਜਾਂ ਖਰਾਬ ਕਪਲਿੰਗ ਆਦਿ ਦੀ ਲੋੜ ਹੋ ਸਕਦੀ ਹੈ। ਸਵੀਕਾਰਯੋਗ ਵਾਈਬ੍ਰੇਸ਼ਨ ਪੱਧਰ ਜਾਂ ਹੋਰ ਪ੍ਰਦਰਸ਼ਨ ਮਾਪ ਪੱਧਰ ਸਹੀ ਕਿਸਮ ਦੇ ਸੁਧਾਰਾਂ ਅਤੇ ਮੁਰੰਮਤ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰਦੇ ਹਨ। ਇਹਨਾਂ ਸਮੱਸਿਆਵਾਂ ਨੂੰ ਠੀਕ ਕਰਨ ਅਤੇ ਖਤਮ ਕਰਨ ਲਈ ਵੇਰਵੇ ਇਸ ਪੇਪਰ ਦੇ ਬਾਅਦ ਦੇ ਭਾਗਾਂ ਵਿੱਚ ਸਥਿਤ ਹਨ।
ਖੋਜ ਪੜਾਅ ਦੌਰਾਨ ਲਿਆ ਗਿਆ ਡੇਟਾ ਆਮ ਤੌਰ ‘ਤੇ ਸ਼ੁਰੂਆਤੀ ਵਿਸ਼ਲੇਸ਼ਣ ਤੋਂ ਇਲਾਵਾ ਕੁਝ ਵੀ ਪ੍ਰਦਾਨ ਕਰਨ ਲਈ ਨਾਕਾਫ਼ੀ ਹੁੰਦਾ ਹੈ। ਵਧੇਰੇ ਵਿਸਤ੍ਰਿਤ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਨ ਲਈ ਹੋਰ ਕਿਸਮਾਂ ਅਤੇ ਵਧੇਰੇ ਸ਼ਾਮਲ ਡੇਟਾ ਲੈਣ ਦੀ ਲੋੜ ਹੈ। ਕੁਝ ਮਾਮਲਿਆਂ ਵਿੱਚ ਮਸ਼ੀਨ ਨੂੰ ਵੱਖ-ਵੱਖ ਹਾਲਤਾਂ ਵਿੱਚ ਅਤੇ ਕਈ ਤਕਨੀਕਾਂ ਨਾਲ ਚਲਾਉਣ ਦੀ ਲੋੜ ਹੋ ਸਕਦੀ ਹੈ। ਸਿਰਫ਼ ਖੋਜ ਡੇਟਾ ਦੇ ਨਤੀਜਿਆਂ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਕਿਸੇ ਸਮੱਸਿਆ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਨ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰਨਾ ਇੱਕ ਭਰੋਸੇਯੋਗ ਵਿਸ਼ਲੇਸ਼ਣ ਤੋਂ ਘੱਟ ਹੈ। ਜੇ ਵਧੇਰੇ ਸਹੀ ਵਿਸ਼ਲੇਸ਼ਣ ਲਈ ਖੋਜ ਪੜਾਅ ਦੌਰਾਨ ਲੋੜੀਂਦਾ ਡੇਟਾ ਲਿਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਇਹ ਖੋਜ ਪ੍ਰਕਿਰਿਆ ਨੂੰ ਹੌਲੀ ਕਰ ਦੇਵੇਗਾ। ਜ਼ਿਆਦਾਤਰ ਤਜਰਬੇਕਾਰ ਭਰੋਸੇਯੋਗਤਾ ਵਿਭਾਗਾਂ ਨੇ ਇਹਨਾਂ ਦੋ ਪੜਾਵਾਂ ਨੂੰ ਵੱਖ ਕਰਨ ਦੇ ਮਹੱਤਵ ਨੂੰ ਪਛਾਣਿਆ ਹੈ।
ਇਲੈਕਟ੍ਰੀਕਲ ਭਰੋਸੇਯੋਗਤਾ:
ਬਹੁਤੇ ਲੋਕ ਸਿਰਫ ਇਹ ਮੰਨਦੇ ਹਨ ਕਿ ਬਿਜਲੀ ਦੀ ਭਰੋਸੇਯੋਗਤਾ ਪਲਾਂਟ ਨੂੰ ਬਿਜਲੀ ਦੀ ਸਫਲਤਾਪੂਰਵਕ ਡਿਲੀਵਰੀ ਨਾਲ ਖਤਮ ਹੁੰਦੀ ਹੈ। ਇਲੈਕਟ੍ਰੀਕਲ ਪਾਵਰ ਅੱਜ ਉਦਯੋਗ ਵਿੱਚ ਵਰਤੇ ਜਾਣ ਵਾਲੇ ਸਭ ਤੋਂ ਮਹੱਤਵਪੂਰਨ ਕੱਚੇ ਮਾਲ ਵਿੱਚੋਂ ਇੱਕ ਹੈ। ਸਾਡੇ ਕੋਲ ਨਾ ਸਿਰਫ਼ ਸ਼ਕਤੀ ਦਾ ਨਿਰੰਤਰ ਪ੍ਰਵਾਹ ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ, ਇਹ ਸਾਫ਼ ਅਤੇ ਸੰਤੁਲਿਤ ਵੀ ਹੋਣਾ ਚਾਹੀਦਾ ਹੈ। ਫਿਰ ਵੀ, ਇਹ ਮਹੱਤਵਪੂਰਨ ਵਸਤੂ ਪਲਾਂਟ ਨੂੰ ਸਪਲਾਈ ਕੀਤੇ ਗਏ ਸਭ ਤੋਂ ਘੱਟ ਨਿਰੀਖਣ ਕੀਤੇ ਕੱਚੇ ਮਾਲ ਵਿੱਚੋਂ ਇੱਕ ਹੈ।
ਪਲਾਂਟ ਦੇ ਲਗਭਗ ਸਾਰੇ ਖੇਤਰਾਂ ਵਿੱਚ ਡ੍ਰਾਈਵਿੰਗ ਫੋਰਸ ਪ੍ਰਦਾਨ ਕਰਨ ਲਈ ਬਿਜਲੀ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ ਜੋ ਜ਼ਿਆਦਾਤਰ ਉਪਕਰਨਾਂ ਨੂੰ ਸੰਚਾਲਿਤ ਕਰਦੀ ਹੈ ਜੋ ਉਤਪਾਦ ਪੈਦਾ ਕਰਦੇ ਹਨ ਜਾਂ ਸੇਵਾਵਾਂ ਪ੍ਰਦਾਨ ਕਰਦੇ ਹਨ ਜੋ ਪਲਾਂਟ ਦੇ ਉਪਕਰਣ ਨੂੰ ਪ੍ਰਦਰਸ਼ਨ ਕਰਨ ਲਈ ਬਣਾਇਆ ਗਿਆ ਸੀ। ਬਿਜਲੀ ਆਪਣੇ ਆਪ ਵਿੱਚ ਇੱਕ ਵਿਲੱਖਣ ਉਤਪਾਦ ਹੈ, ਜਿਸ ਵਿੱਚ ਇਸਨੂੰ ਨਿਰੰਤਰ ਵਹਾਅ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ, ਸੁਵਿਧਾਜਨਕ ਢੰਗ ਨਾਲ ਸਟੋਰ ਨਹੀਂ ਕੀਤਾ ਜਾ ਸਕਦਾ, ਅਤੇ ਆਮ ਤੌਰ ‘ਤੇ ਵਰਤੋਂ ਤੋਂ ਪਹਿਲਾਂ ਜਾਂਚ ਨਹੀਂ ਕੀਤੀ ਜਾਂਦੀ।
ਪਾਵਰ ਕੁਆਲਿਟੀ ਟੁੱਟਣ ਜਾਂ ਅਸਫਲਤਾ ਦਾ ਕਾਰਨ ਹੋ ਸਕਦੀ ਹੈ। ਮਾੜੀ “ਪਾਵਰ ਕੁਆਲਿਟੀ” ਦਾ ਨਤੀਜਾ ਆਮ ਤੌਰ ‘ਤੇ ਲੰਬੇ ਸਮੇਂ ਲਈ ਹੁੰਦਾ ਹੈ ਅਤੇ ਇਸਨੂੰ ਹਮੇਸ਼ਾ ਸਮੱਸਿਆ ਦਾ ਸਰੋਤ ਨਹੀਂ ਮੰਨਿਆ ਜਾਂਦਾ ਹੈ। ਮੋਟਰ ਸੜ ਜਾਂਦੀ ਹੈ ਜਾਂ ਬ੍ਰੇਕਰ ਟ੍ਰਿਪ ਹੁੰਦਾ ਹੈ, ਮੋਟਰ ਅਤੇ ਚਲਾਈ ਮਸ਼ੀਨ ‘ਤੇ ਇਲੈਕਟ੍ਰੀਕਲ ਅਤੇ ਮਕੈਨੀਕਲ ਜਾਂਚ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਫਿਰ ਮੋਟਰ ਨੂੰ ਦੁਬਾਰਾ ਬਣਾਇਆ ਜਾਂ ਬਦਲਿਆ ਜਾਂਦਾ ਹੈ ਅਤੇ ਸਾਰੀ ਪ੍ਰਕਿਰਿਆ ਦੁਹਰਾਈ ਜਾਂਦੀ ਹੈ। ਇਸ ਤੋਂ ਇਲਾਵਾ, ਅੱਜ ਦੀਆਂ ਨਵੀਆਂ ਮਸ਼ੀਨਾਂ ਅਤੇ ਉਪਕਰਨਾਂ ਨੇ ਬਿਹਤਰ ਪਾਵਰ ਕੁਆਲਿਟੀ ਦੀ ਲੋੜ ਨੂੰ ਵਧਾਉਣ ਲਈ ਪ੍ਰੇਰਿਤ ਕੀਤਾ ਹੈ। ਫਿਰ ਵੀ, ਜੇਕਰ ਪਾਵਰ ਦੀ ਜਾਂਚ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਇਸਦੀ ਜਾਂਚ ਉਸ ਬਿੰਦੂ ‘ਤੇ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ ਜਿੱਥੇ ਇਹ ਪਲਾਂਟ ਵਿੱਚ ਆਉਂਦੀ ਹੈ ਨਾ ਕਿ ਕਿਸੇ ਰੁਟੀਨ ਦੇ ਅਧਾਰ ‘ਤੇ। ਨਾ ਹੀ ਇਸ ਬਿੰਦੂ ‘ਤੇ ਨਿਰੀਖਣ ਕੀਤਾ ਜਾਂਦਾ ਹੈ ਕਿ ਇਹ ਮੋਟਰ ਜਾਂ ਉਪਕਰਣ ਨੂੰ ਖੁਦ ਸਪਲਾਈ ਕੀਤਾ ਜਾਂਦਾ ਹੈ.
ਪਾਵਰ ਆਮ ਤੌਰ ‘ਤੇ ਵਰਤੋਂ ਦੇ ਬਿੰਦੂ ਤੋਂ ਬਹੁਤ ਦੂਰ ਪੈਦਾ ਕੀਤੀ ਜਾਂਦੀ ਹੈ, ਅਸਲ ਪੀੜ੍ਹੀ ਦੀ ਭਰੋਸੇਯੋਗਤਾ ਅਣਜਾਣ ਹੈ ਅਤੇ ਇਸ ਨੂੰ ਕਈ ਹੋਰ ਜਨਰੇਟਰਾਂ ਨਾਲ ਗਰਿੱਡ ‘ਤੇ ਜੋੜਿਆ ਜਾਂਦਾ ਹੈ। ਪਲਾਂਟ ‘ਤੇ ਪਹੁੰਚਣ ਤੋਂ ਪਹਿਲਾਂ ਬਿਜਲੀ ਨੂੰ ਕਈ ਵੱਖ-ਵੱਖ ਟ੍ਰਾਂਸਫਾਰਮਰਾਂ, ਅਤੇ ਕਈ ਮੀਲ ਓਵਰਹੈੱਡ ਅਤੇ ਭੂਮੀਗਤ ਕੇਬਲਿੰਗ ਰਾਹੀਂ ਲਿਜਾਇਆ ਜਾਂਦਾ ਹੈ। ਇਹਨਾਂ ਵਿੱਚੋਂ ਬਹੁਤ ਸਾਰੇ ਬਿਜਲੀ ਵੰਡ ਪ੍ਰਣਾਲੀਆਂ ਦੀ ਮਲਕੀਅਤ, ਪ੍ਰਬੰਧਿਤ ਅਤੇ ਕਈ ਵੱਖ-ਵੱਖ ਸੰਸਥਾਵਾਂ ਦੁਆਰਾ ਸੰਭਾਲ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਇੱਕ ਵਾਰ ਖਰਾਬ ਜਾਂ “ਮਾੜੀ ਕੁਆਲਿਟੀ” ਪਾਵਰ ਗਰਿੱਡ ‘ਤੇ ਪਾ ਦਿੱਤੀ ਜਾਂਦੀ ਹੈ ਤਾਂ ਇਸਨੂੰ ਉਪਭੋਗਤਾ ਦੁਆਰਾ ਹਟਾਇਆ ਜਾਂ ਰੱਦ ਵੀ ਨਹੀਂ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
ਬਹੁਤ ਸਾਰੇ ਪੈਦਾ ਕਰਨ ਵਾਲੇ ਪਲਾਂਟ ਛੋਟੇ ਅਤੇ ਨਿੱਜੀ ਮਲਕੀਅਤ ਵਾਲੇ ਹਨ। ਬਿਜਲੀ ਦੀ ਗੁਣਵੱਤਾ ਨੂੰ ਨਿਯੰਤ੍ਰਿਤ ਕਰਨ ਅਤੇ ਮਾਨਕੀਕਰਨ ਦੀ ਕੋਸ਼ਿਸ਼ ਕਰਨ ਲਈ ਕੰਮ ਜਾਰੀ ਹੈ ਅਤੇ ਬਹੁਤ ਸਾਰੇ ਰਾਜਾਂ ਦੇ ਆਪਣੇ ਵਿਸ਼ੇਸ਼ ਮਿਆਰ ਅਤੇ ਨਿਯਮ ਹਨ। ਹਾਲਾਂਕਿ, ਪੈਦਾ ਕੀਤੀ ਬਿਜਲੀ ਜ਼ਰੂਰੀ ਤੌਰ ‘ਤੇ ਰਾਜ ਦੀਆਂ ਸਰਹੱਦਾਂ ‘ਤੇ ਨਹੀਂ ਰੁਕਦੀ, ਜਿੱਥੇ ਇਹ ਪੈਦਾ ਹੁੰਦੀ ਹੈ।
ਭਾਵੇਂ ਬਿਜਲੀ “ਚੰਗੀ ਕੁਆਲਿਟੀ” ਵਿੱਚ ਪਲਾਂਟ ਵਿੱਚ ਪਹੁੰਚਦੀ ਹੈ, ਮੋਟਰ ਪ੍ਰਣਾਲੀ ਦੇ ਅੰਦਰ ਬਹੁਤ ਸਾਰੇ ਖੇਤਰ ਹਨ ਜੋ ਪਲਾਂਟ ਨੂੰ ਚਲਾਉਣ ਦੀ ਨਿਰੰਤਰ ਸਫਲਤਾ ‘ਤੇ ਬੁਰਾ ਪ੍ਰਭਾਵ ਪਾ ਸਕਦੇ ਹਨ।
ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਸਿਸਟਮ:
ਮੋਟਰ ਤੋਂ ਵੱਧ ਪੌਦੇ ਦੀ ਭਰੋਸੇਯੋਗਤਾ ਨੂੰ ਪ੍ਰਭਾਵਿਤ ਕਰ ਸਕਦਾ ਹੈ। ਅਸਲ ਵਿੱਚ ਮੋਟਰ ਸਿਸਟਮ ਦੇ ਅੰਦਰ ਕੋਈ ਵੀ ਚੀਜ਼ ਮੋਟਰ ਸਿਸਟਮ ਦੀ ਅਸਫਲਤਾ ਦਾ ਕਾਰਨ ਬਣ ਸਕਦੀ ਹੈ, ਜਿਸ ਨਾਲ ਪ੍ਰਕਿਰਿਆ ਵਿੱਚ ਵਿਘਨ ਪੈ ਸਕਦਾ ਹੈ। ਇੱਕ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਖੋਜ ਸੰਭਾਵੀ ਸਮੱਸਿਆਵਾਂ ਲਈ ਮਸ਼ੀਨ ਦੀ ਜਾਂਚ ਕਰੇਗੀ। ਇਹ ਤਰਕਪੂਰਨ ਹੈ ਕਿ ਖੋਜ ਵਿਧੀ ਜਿੰਨਾ ਸੰਭਵ ਹੋ ਸਕੇ ਘੱਟ ਮਾਪਾਂ ਦੇ ਨਾਲ ਮੋਟਰ ਸਿਸਟਮ ਦੇ ਜ਼ਿਆਦਾਤਰ ਹਿੱਸੇ ਨੂੰ ਸਕ੍ਰੀਨ ਕਰੇਗੀ। ਖੋਜ ਵਿਧੀ ਦੀ ਵਰਤੋਂ ਵੱਧ ਤੋਂ ਵੱਧ ਸੰਭਾਵੀ ਅਸਫਲਤਾਵਾਂ ਦੀ ਪਛਾਣ ਕਰਨ ਲਈ ਵੀ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਇੱਕ ਪ੍ਰਭਾਵੀ ਸਕ੍ਰੀਨਿੰਗ ਵਿਧੀ ਦੀ ਚੋਣ ਕਰਦੇ ਸਮੇਂ, ਮੋਟਰ ਪ੍ਰਣਾਲੀ ਵਿੱਚ ਅਸਫਲਤਾਵਾਂ ਪੈਦਾ ਕਰਨ ਵਾਲੀਆਂ ਸਮੱਸਿਆਵਾਂ ਦੀ ਪਛਾਣ ਕਰਨਾ ਵੀ ਜ਼ਰੂਰੀ ਹੈ. ਇੱਕ ਵਾਰ ਇਹਨਾਂ ਸਵਾਲਾਂ ਦੇ ਜਵਾਬ ਦਿੱਤੇ ਜਾਣ ਤੋਂ ਬਾਅਦ, ਘੱਟ ਤੋਂ ਘੱਟ ਸਮੇਂ ਵਿੱਚ ਬਹੁਤ ਸਾਰੀਆਂ ਮਸ਼ੀਨਾਂ ਨੂੰ ਸਕ੍ਰੀਨ ਕਰਨ ਲਈ ਉਪਲਬਧ ਸੰਭਾਵੀ ਤਰੀਕਿਆਂ ਦੀ ਪਛਾਣ ਕਰਨਾ ਜ਼ਰੂਰੀ ਹੈ।
ਮੋਟਰ ਸਿਸਟਮ ਵਿੱਚ ਦੋ ਉਪ-ਸਿਸਟਮ ਹੁੰਦੇ ਹਨ: ਮੋਟਰ/ਡਰਾਈਵ ਉਪ-ਸਿਸਟਮ ਅਤੇ ਮਕੈਨੀਕਲ ਉਪ-ਸਿਸਟਮ। ਮੋਟਰ/ਡਰਾਈਵ ਸਬ-ਸਿਸਟਮ ਪਲਾਂਟ ਵਿੱਚ ਆਉਣ ਵਾਲੀ ਪਾਵਰ ਨਾਲ ਸ਼ੁਰੂ ਹੁੰਦਾ ਹੈ, ਇਸ ਵਿੱਚ ਟ੍ਰਾਂਸਫਾਰਮਰ, ਕੇਬਲਿੰਗ ਅਤੇ ਸਵਿਚਿੰਗ ਡਿਵਾਈਸ ਸ਼ਾਮਲ ਹੋ ਸਕਦੇ ਹਨ। ਇਨਕਮਿੰਗ ਪਾਵਰ ਫਿਰ ਡਿਸਟਰੀਬਿਊਸ਼ਨ ਜਾਂ ਮੋਟਰ ਕੰਟਰੋਲ ਸੈਂਟਰ (MCC) ਨੂੰ ਸਪਲਾਈ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। MCC ਵਿੱਚ ਸਟਾਰਟਰ, ਸੁਰੱਖਿਆ ਯੰਤਰ, ਜਿਵੇਂ ਕਿ ਓਵਰਲੋਡ, ਵੇਰੀਏਬਲ ਫ੍ਰੀਕੁਐਂਸੀ ਡਰਾਈਵ ਅਤੇ ਕਈ ਹੋਰ ਪ੍ਰਣਾਲੀਆਂ ਸ਼ਾਮਲ ਹੁੰਦੀਆਂ ਹਨ ਜੋ ਮੋਟਰ ਨੂੰ ਸਫਲਤਾਪੂਰਵਕ ਚਲਾਉਣ ਅਤੇ ਨਿਯੰਤਰਿਤ ਕਰਨ ਲਈ ਸੁਰੱਖਿਅਤ ਢੰਗ ਨਾਲ ਪਾਵਰ ਟ੍ਰਾਂਸਪੋਰਟ ਕਰਦੀਆਂ ਹਨ।
ਇੱਕ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਇਲੈਕਟ੍ਰੀਕਲ ਊਰਜਾ ਨੂੰ ਮਕੈਨੀਕਲ ਟਾਰਕ ਵਿੱਚ ਬਦਲਦੀ ਹੈ; ਇਸ ਲਈ, ਮੋਟਰ ਵਿੱਚ ਇਲੈਕਟ੍ਰੀਕਲ ਕੰਪੋਨੈਂਟ ਅਤੇ ਮਕੈਨੀਕਲ ਕੰਪੋਨੈਂਟ ਦੋਵੇਂ ਹੁੰਦੇ ਹਨ। ਮੋਟਰ ਦੇ ਬਿਜਲਈ ਹਿੱਸੇ ਵਿੱਚ ਸਟੇਸ਼ਨਰੀ ਕੰਪੋਨੈਂਟ ਜਾਂ ਸਟੇਟਰ, ਅਤੇ ਰੋਟੇਟਿੰਗ ਕੰਪੋਨੈਂਟ ਜਾਂ ਰੋਟਰ ਸ਼ਾਮਲ ਹੁੰਦੇ ਹਨ।
ਸਟੇਟਰ ਵਿੰਡਿੰਗ ਕਰੰਟ ਦੇ ਵਹਾਅ ਲਈ ਇੱਕ ਮਾਰਗ ਪ੍ਰਦਾਨ ਕਰਦੇ ਹਨ, ਸਟੇਟਰ ਵਿੱਚ ਇੱਕ ਚੁੰਬਕੀ ਖੇਤਰ ਬਣਾਉਂਦੇ ਹਨ। ਰੋਟਰ ਵਿੱਚ ਰੋਟਰ ਦੁਆਰਾ ਵਹਿਣ ਲਈ ਇੱਕ ਮਾਰਗ ਪ੍ਰਦਾਨ ਕਰਨ ਲਈ ਵਿੰਡਿੰਗ ਜਾਂ ਬਾਰ ਹੁੰਦੇ ਹਨ, ਇਸ ਤਰ੍ਹਾਂ ਇੱਕ ਰੋਟਰ ਚੁੰਬਕੀ ਖੇਤਰ ਬਣਾਉਂਦਾ ਹੈ। ਰੋਟਰ ਚੁੰਬਕੀ ਖੇਤਰ ਅਤੇ ਸਟੇਟਰ ਚੁੰਬਕੀ ਖੇਤਰ ਵਿਚਕਾਰ ਪਰਸਪਰ ਪ੍ਰਭਾਵ ਮਕੈਨੀਕਲ ਟਾਰਕ ਬਣਾਉਂਦਾ ਹੈ। ਮਕੈਨੀਕਲ ਸਬ-ਸਿਸਟਮ ਮੋਟਰ ਦੇ ਮਕੈਨੀਕਲ ਹਿੱਸੇ ਨਾਲ ਸ਼ੁਰੂ ਹੁੰਦਾ ਹੈ। ਇਹ ਸ਼ਾਫਟ ਨਾਲ ਸ਼ੁਰੂ ਹੁੰਦਾ ਹੈ, ਜੋ ਰੋਟਰ ਅਤੇ ਸਟੇਟਰ ਚੁੰਬਕੀ ਖੇਤਰਾਂ ਦੇ ਆਪਸੀ ਤਾਲਮੇਲ ਦੁਆਰਾ ਪੈਦਾ ਹੋਏ ਟੋਰਕ ਨੂੰ ਚਲਾਈ ਮਸ਼ੀਨ ਜਾਂ ਲੋਡ ਵਿੱਚ ਤਬਦੀਲ ਕਰਦਾ ਹੈ। ਬੇਅਰਿੰਗ ਰੋਟੇਟਿੰਗ ਨੂੰ ਗੈਰ-ਘੁੰਮਣ ਵਾਲੇ ਭਾਗਾਂ ਤੋਂ ਵੱਖ ਕਰਦੇ ਹਨ, ਨਾਲ ਹੀ, ਰੋਟਰ ਨੂੰ ਮੋਟਰ ਦੇ ਅੰਦਰ ਸਥਿਤ ਕਰਦੇ ਹਨ। ਮੋਟਰ ਸ਼ਾਫਟ ਇੱਕ ਕਪਲਿੰਗ ਯੰਤਰ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਲੋਡ ਨਾਲ ਜੁੜਿਆ ਹੁੰਦਾ ਹੈ ਜਿਵੇਂ ਕਿ ਡਾਇਰੈਕਟ ਕਪਲਿੰਗ, ਬੈਲਟ ਅਤੇ ਪਲਲੀ ਜਾਂ ਕਈ ਵਾਰ ਗੀਅਰ ਵੀ।
ਸੰਚਾਲਿਤ ਮਸ਼ੀਨ ਸਿਸਟਮ ਦਾ ਉਹ ਹਿੱਸਾ ਹੈ ਜੋ ਕੰਮ ਕਰਦਾ ਹੈ ਅਤੇ ਕਈ ਤਰ੍ਹਾਂ ਦੀਆਂ ਮਸ਼ੀਨਾਂ ਹਨ ਜੋ ਲੋਡ ਵਜੋਂ ਕੰਮ ਕਰਦੀਆਂ ਹਨ, ਜਿਵੇਂ ਕਿ ਪੰਪ, ਪੱਖੇ, ਕੰਪ੍ਰੈਸ਼ਰ, ਮਸ਼ੀਨ ਟੂਲ, ਰੋਬੋਟ, ਵਾਲਵ ਸਟੈਮ ਹੋਰ ਬਹੁਤ ਸਾਰੇ ਮਕੈਨੀਕਲ ਯੰਤਰਾਂ ਵਿੱਚ। ਮਸ਼ੀਨ ਪ੍ਰਣਾਲੀ ਦਾ ਅੰਤਮ ਹਿੱਸਾ ਖੁਦ ਪ੍ਰਕਿਰਿਆ ਹੈ, ਮਸ਼ੀਨ ਸਮੱਗਰੀ ਨੂੰ ਆਕਾਰ ਜਾਂ ਕੱਟ ਸਕਦੀ ਹੈ, ਇਹ ਦਬਾਅ ਵਧਾਉਂਦੀ ਹੈ, ਹਵਾ ਜਾਂ ਹੋਰ ਕਿਸਮ ਦੀਆਂ ਗੈਸਾਂ, ਟ੍ਰਾਂਸਪੋਰਟ ਤਰਲ ਜਾਂ ਮਿਸ਼ਰਣ ਸਮੱਗਰੀ ਨੂੰ ਵਧਾਉਂਦੀ ਹੈ। ਇੱਕ ਖੋਜ ਵਿਧੀ ਦੀ ਚੋਣ ਕਰਦੇ ਸਮੇਂ ਸਿਸਟਮ ਵਿੱਚ ਜਿੰਨੇ ਸੰਭਵ ਹੋ ਸਕੇ ਬਹੁਤ ਸਾਰੇ ਹਿੱਸਿਆਂ ਦਾ ਸਰਵੇਖਣ ਕਰਨਾ ਜ਼ਰੂਰੀ ਹੁੰਦਾ ਹੈ।
ਮੋਟਰ/ਡਰਾਈਵ ਉਪ-ਸਿਸਟਮ:
ਮੋਟਰ/ਡਰਾਈਵ ਦੇ ਉਪ-ਸਿਸਟਮ ਵਿੱਚ ਹੋਣ ਵਾਲੀਆਂ ਨੁਕਸ ਦੀਆਂ ਕਿਸਮਾਂ ਜਿਆਦਾਤਰ ਇਲੈਕਟ੍ਰੀਕਲ ਹੁੰਦੀਆਂ ਹਨ।
ਇਨਕਮਿੰਗ ਪਾਵਰ ਫਾਲਟ ਵੋਲਟੇਜ ਦੇ ਮੇਲ ਨਾ ਹੋਣ, ਗੈਰ-ਸਾਇਨੁਸਾਈਡਲ, ਅਤੇ ਵੋਲਟੇਜ ਅਸੰਤੁਲਨ ਤੋਂ ਸੀਮਾ ਹੈ। ਇਹ ਸਿੱਧੇ ਸਪਲਾਇਰ ਤੋਂ ਆ ਸਕਦੇ ਹਨ, ਜਾਂ ਟਰਾਂਸਫਾਰਮਰ ਵਿੰਡਿੰਗਜ਼ ਵਿੱਚ ਸ਼ਾਰਟਸ ਜਾਂ ਟ੍ਰਾਂਸਫਾਰਮਰਾਂ ‘ਤੇ ਗਲਤ ਟੈਪ ਸੈਟਿੰਗਾਂ। ਨਾਨਸਿਨਸੌਇਡਲ ਪਾਵਰ ਮੋਟਰ ਦੇ ਅੰਦਰ ਨੈਗੇਟਿਵ ਸੀਕੁਏਂਸਿੰਗ ਹਾਰਮੋਨਿਕਸ ਸਥਾਪਤ ਕਰ ਸਕਦੀ ਹੈ, ਜੋ ਵਾਧੂ ਗਰਮੀ ਪੈਦਾ ਕਰਦੀ ਹੈ।
ਨਿਯੰਤਰਣ ਪ੍ਰਣਾਲੀ ਵਿੱਚ ਨੁਕਸ ਬੱਸ ਬਾਰਾਂ ਜਾਂ ਕੇਬਲਿੰਗ ਦੇ ਢਿੱਲੇ ਕੁਨੈਕਸ਼ਨਾਂ, ਖਰਾਬ, ਖਰਾਬ ਜਾਂ ਢਿੱਲੇ ਸੰਪਰਕਾਂ, ਢਿੱਲੇ ਫਿਊਜ਼ ਕੁਨੈਕਸ਼ਨਾਂ, ਜਾਂ ਨੁਕਸਦਾਰ ਓਵਰਲੋਡ ਰੀਲੇਅ ਤੱਕ ਹੋ ਸਕਦੇ ਹਨ। ਢਿੱਲੇ ਕੁਨੈਕਸ਼ਨ, ਅਤੇ ਟੁੱਟੇ ਹੋਏ ਜਾਂ ਪਿਟ ਕੀਤੇ ਸੰਪਰਕਕਾਰ ਇੱਕ ਵੋਲਟੇਜ ਅਸੰਤੁਲਨ ਬਣਾਉਂਦੇ ਹਨ, ਮੋਟਰ ‘ਤੇ ਲਾਗੂ ਕੀਤਾ ਗਿਆ ਇੱਕ ਛੋਟਾ ਵੋਲਟੇਜ ਅਸੰਤੁਲਨ 20 ਗੁਣਾ ਜ਼ਿਆਦਾ ਮੌਜੂਦਾ ਅਸੰਤੁਲਨ ਪੈਦਾ ਕਰ ਸਕਦਾ ਹੈ, ਜੋ ਮੋਟਰ ਸਿਸਟਮ ਵਿੱਚ ਵਾਧੂ ਗਰਮੀ ਪੈਦਾ ਕਰਨ ਵਾਲੇ ਸਰਕੂਲੇਟ ਕਰੰਟ ਨੂੰ ਸੈੱਟ ਕਰਦਾ ਹੈ।
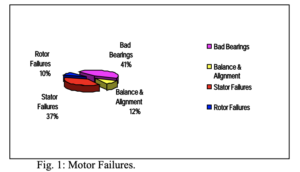
ਮੋਟਰ ਸਿਸਟਮ ਵਿੱਚ ਨੁਕਸ ਨੂੰ ਇਲੈਕਟ੍ਰੀਕਲ ਅਤੇ ਮਕੈਨੀਕਲ ਨੁਕਸ ਵਿੱਚ ਵੱਖ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ। 1980 ਦੇ ਮੱਧ ਵਿੱਚ ਇਲੈਕਟ੍ਰਿਕ ਪਾਵਰ ਰਿਸਰਚ ਇੰਸਟੀਚਿਊਟ ਨੇ ਰਿਪੋਰਟ ਦਿੱਤੀ ਕਿ 53% ਮੋਟਰ ਫੇਲ੍ਹ ਹੋਣ ਦਾ ਸੁਭਾਅ ਮਕੈਨੀਕਲ ਸੀ (41% ਬੇਅਰਿੰਗ, 12% ਸੰਤੁਲਨ ਅਤੇ ਅਲਾਈਨਮੈਂਟ) ਅਤੇ 47% ਇਲੈਕਟ੍ਰੀਕਲ (37% ਵਾਇਨਿੰਗ ਅਤੇ 10% ਰੋਟਰ), ਚਿੱਤਰ ਵੇਖੋ। 1. ਵਿੰਡਿੰਗ ਫਾਲਟਸ ਵਿੱਚੋਂ 83% ਹਵਾ ਵਾਲੇ ਸ਼ਾਰਟਸ ਹਨ ਅਤੇ ਸਿਰਫ 17% ਜ਼ਮੀਨੀ ਨੁਕਸ ਲਈ ਇਨਸੂਲੇਸ਼ਨ ਹਨ। ਰੋਟਰ ਦੇ ਨੁਕਸ ਮੋਟਰ ਦੀ ਕਿਸਮ ਅਤੇ ਉਸਾਰੀ ਦੇ ਨਾਲ ਵੱਖ-ਵੱਖ ਹੋਣਗੇ। ਹਾਲਾਂਕਿ, ਸਭ ਤੋਂ ਆਮ ਮੋਟਰ ਸਕੁਇਰਲ ਕੇਜ ਰੋਟਰ ਇੰਡਕਸ਼ਨ ਮੋਟਰ ਹੈ। ਸਕੁਇਰਲ ਕੇਜ ਰੋਟਰਾਂ ਵਿੱਚ ਆਮ ਨੁਕਸ ਢਿੱਲੇ ਜਾਂ ਟੁੱਟੇ ਹੋਏ ਰੋਟਰ ਬਾਰ, ਗੈਰ-ਕੇਂਦਰਿਤ ਰੋਟਰ, ਜਾਂ ਥਰਮਲ ਤੌਰ ‘ਤੇ ਸੰਵੇਦਨਸ਼ੀਲ ਰੋਟਰ ਹਨ।
ਮਕੈਨੀਕਲ ਉਪ-ਸਿਸਟਮ:
ਮੋਟਰ ਦੇ ਅੰਦਰ ਮਕੈਨੀਕਲ ਨੁਕਸ ਅਸਲ ਵਿੱਚ ਕਿਸੇ ਹੋਰ ਘੁੰਮਣ ਵਾਲੇ ਉਪਕਰਣ ਦੇ ਸਮਾਨ ਹਨ। ਇਹਨਾਂ ਨੁਕਸਾਂ ਵਿੱਚ ਅਸੰਤੁਲਨ, ਗਲਤ ਅਲਾਈਨਮੈਂਟ, ਝੁਕਿਆ ਸ਼ਾਫਟ, ਢਿੱਲੇ ਹਿੱਸੇ ਅਤੇ ਖਰਾਬ ਜਾਂ ਖਰਾਬ ਬੇਅਰਿੰਗ ਸ਼ਾਮਲ ਹੋ ਸਕਦੇ ਹਨ। ਸਟੇਟਰ ਜਾਂ ਰੋਟਰ ਚੁੰਬਕੀ ਖੇਤਰਾਂ ਦੇ ਵਿਗਾੜ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਮੋਟਰਾਂ ਵੀ ਅਸਫਲਤਾਵਾਂ ਦੇ ਅਧੀਨ ਹੁੰਦੀਆਂ ਹਨ। ਇਹ ਨੁਕਸ ਮਕੈਨੀਕਲ ਬਲਾਂ ਨੂੰ ਬਣਾਉਂਦੇ ਹਨ ਜੋ ਹੋਰ ਮਕੈਨੀਕਲ ਤਾਕਤਾਂ ਜਿਵੇਂ ਕਿ ਅਸੰਤੁਲਨ, ਮਿਸਲਾਈਨਮੈਂਟ, ਆਦਿ ਨਾਲ ਸੰਚਾਰ ਕਰਦੇ ਹਨ।
ਮੋਟਰ ਦੇ ਅੰਦਰ, ਰੋਟਰ ਦੀ ਸਥਿਤੀ ਅਤੇ ਰੋਟੇਟਿੰਗ ਕੰਪੋਨੈਂਟ ਨੂੰ ਸਟੇਸ਼ਨਰੀ ਕੰਪੋਨੈਂਟ ਤੋਂ ਵੱਖ ਕਰਨ ਲਈ ਬੇਅਰਿੰਗਾਂ ਦੀ ਵਰਤੋਂ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਦੋ ਕਿਸਮਾਂ ਦੀਆਂ ਬੇਅਰਿੰਗਾਂ ਆਮ ਤੌਰ ‘ਤੇ ਵਰਤੀਆਂ ਜਾਂਦੀਆਂ ਹਨ, ਰੋਲਿੰਗ ਐਲੀਮੈਂਟ ਬੇਅਰਿੰਗਸ ਅਤੇ ਸਲੀਵ ਜਾਂ ਜਰਨਲ ਬੇਅਰਿੰਗਸ।
ਕਪਲਿੰਗ ਨੁਕਸ ਕਪਲਿੰਗ ਡਿਵਾਈਸਾਂ ਦੀ ਕਿਸਮ ‘ਤੇ ਨਿਰਭਰ ਹਨ। ਮੋਟਰ ਨੂੰ ਲੋਡ ਨਾਲ ਜੋੜਨ ਲਈ ਬਹੁਤ ਸਾਰੇ ਵੱਖ-ਵੱਖ ਉਪਕਰਨ ਉਪਲਬਧ ਹਨ। ਕੁਝ ਯੰਤਰ ਮੋਟਰ ਨੂੰ ਸਿੱਧੀ ਮਸ਼ੀਨ ਨਾਲ ਜੋੜਦੇ ਹਨ ਅਤੇ ਇਹ ਮਸ਼ੀਨਾਂ ਇੱਕੋ ਗਤੀ ਅਤੇ ਇੱਕੋ ਦਿਸ਼ਾ ਵਿੱਚ ਚਲਦੀਆਂ ਹਨ। ਕੁਝ ਉਪਕਰਣ ਗਤੀ ਜਾਂ ਦਿਸ਼ਾ ਜਾਂ ਦੋਵੇਂ ਬਦਲਦੇ ਹਨ। ਹੋਰ ਆਮ ਜੋੜਨ ਵਾਲੇ ਯੰਤਰ ਬੈਲਟ, ਪੁਲੀ ਅਤੇ ਗੀਅਰ ਹਨ।
ਕਿਸੇ ਵੀ ਕਪਲਿੰਗ ਕਿਸਮ ਵਿੱਚ ਘੁੰਮਣ ਵਾਲੇ ਭਾਗਾਂ ‘ਤੇ ਅਸੰਤੁਲਨ, ਰਨ-ਆਊਟ, ਅਤੇ ਗੈਰ-ਵਰਗ ਮਸ਼ੀਨਿੰਗ ਜਾਂ ਹੋਰ ਫਿੱਟ ਜਾਂ ਅਸੈਂਬਲੀ ਨੁਕਸ ਹੋ ਸਕਦੇ ਹਨ।
ਬੈਲਟ ਅਤੇ ਪੁਲੀ ਦੇ ਪ੍ਰਬੰਧਾਂ ਵਿੱਚ ਨੁਕਸ ਪੈਦਾ ਹੋ ਸਕਦੇ ਹਨ ਕਿਉਂਕਿ ਪੁਲੀ ਨੂੰ ਸ਼ਾਫਟ ‘ਤੇ ਸਹੀ ਢੰਗ ਨਾਲ ਮਾਊਂਟ ਨਹੀਂ ਕੀਤਾ ਗਿਆ ਹੈ, ਪਲਲੀ ਬਾਹਰ ਹੋ ਸਕਦੀ ਹੈ, ਜਾਂ ਬੈਲਟ ਢਿੱਲੀ, ਚੀਰ ਜਾਂ ਫਟ ਸਕਦੀ ਹੈ। ਜੇਕਰ ਕਪਲਿੰਗ ਯੰਤਰ ਇੱਕ ਗੇਅਰ ਪ੍ਰਬੰਧ ਹੈ, ਤਾਂ ਛੋਟੇ ਬਲ ਆਮ ਤੌਰ ‘ਤੇ ਇੱਕ ਗੇਅਰ ਦੇ ਦੂਜੇ ਗੇਅਰ ਦੇ ਨਾਲ “ਜਾਲ” ਦੇ ਦੰਦਾਂ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਮੌਜੂਦ ਹੁੰਦੇ ਹਨ। ਵਾਧੂ ਨੁਕਸ ਉਦੋਂ ਵਾਪਰਦੇ ਹਨ ਜੇਕਰ ਇੱਕ ਜਾਂ ਦੂਜਾ ਗੇਅਰ ਖਤਮ ਹੋ ਗਿਆ ਹੈ। ਗੇਅਰ ਵੀ ਪਹਿਨਣ, ਚੀਰ ਜਾਂ ਟੁੱਟੇ ਦੰਦਾਂ ਦੇ ਅਧੀਨ ਹੁੰਦੇ ਹਨ।
ਸੰਚਾਲਿਤ ਮਸ਼ੀਨ ਜਾਂ ਲੋਡ ਵਿੱਚ ਅਸੰਤੁਲਨ, ਗਲਤ-ਅਲਾਈਨਮੈਂਟ ਜਾਂ ਰਨ ਆਊਟ ਦੇ ਵੱਖ-ਵੱਖ ਪੱਧਰ ਵੀ ਹੋ ਸਕਦੇ ਹਨ ਜੋ ਘੁੰਮਣ ਵਾਲੀਆਂ ਤਾਕਤਾਂ ਬਣਾ ਸਕਦੇ ਹਨ। ਸੈਂਟਰਿਫਿਊਗਲ ਮਸ਼ੀਨਾਂ ਜਿਵੇਂ ਕਿ ਪੰਪ ਦਾ ਪੱਖਾ ਅਤੇ ਇੱਥੋਂ ਤੱਕ ਕਿ ਕੰਪ੍ਰੈਸਰ ਵੀ ਹਾਈਡ੍ਰੌਲਿਕ ਬਲ ਬਣਾਉਂਦੇ ਹਨ ਜੋ ਮਸ਼ੀਨ ਦੇ ਘੁੰਮਣ ਵਾਲੇ ਅਤੇ ਗੈਰ-ਘੁੰਮਣ ਵਾਲੇ ਹਿੱਸਿਆਂ ਵਿਚਕਾਰ ਪਰਸਪਰ ਪ੍ਰਭਾਵ ਪਾਉਂਦੇ ਹਨ। ਇਹ ਬਲ ਹਰ ਵਾਰ ਗਤੀ ਦਾ ਕਾਰਨ ਬਣਦੇ ਹਨ ਜਦੋਂ ਇੱਕ ਪ੍ਰੇਰਕ ਵੈਨ ਜਾਂ ਬਲੇਡ ਇੱਕ ਸਥਿਰ ਹਿੱਸੇ, ਜਿਵੇਂ ਕਿ ਪੰਪ ਵਿੱਚ “ਕੱਟਿਆ ਹੋਇਆ ਪਾਣੀ” ਵਿੱਚੋਂ ਲੰਘਦਾ ਹੈ।
ਪ੍ਰਕਿਰਿਆ ਖੁਦ ਮਸ਼ੀਨ/ਮੋਟਰ ਸਿਸਟਮ ‘ਤੇ ਕੰਮ ਕਰਨ ਵਾਲੀਆਂ ਮਕੈਨੀਕਲ ਬਲਾਂ ਨੂੰ ਬਣਾ ਸਕਦੀ ਹੈ। ਇਹਨਾਂ ਵਿੱਚੋਂ ਕੁਝ ਤਾਕਤਾਂ ਮਸ਼ੀਨ ਦੀ ਕਾਰਵਾਈ ਦਾ ਨਤੀਜਾ ਹਨ। ਮਸ਼ੀਨਾਂ, ਜਿਵੇਂ ਕਿ ਪੰਚ ਪ੍ਰੈਸ ਅਤੇ ਸਟੈਂਪਿੰਗ ਮਸ਼ੀਨਾਂ ਆਮ ਕਾਰਵਾਈ ਦੌਰਾਨ ਬਲ ਬਣਾਉਂਦੀਆਂ ਹਨ। ਪ੍ਰਕ੍ਰਿਆਵਾਂ, ਜਿਵੇਂ ਕਿ cavitation ਅਤੇ recirculation, ਤਰਲ ਪ੍ਰਣਾਲੀ ਵਿੱਚ ਹਾਈਡ੍ਰੌਲਿਕ ਬਲ ਬਣਾ ਸਕਦੇ ਹਨ। ਵਾਧੂ ਪ੍ਰਕਿਰਿਆ ਤਬਦੀਲੀਆਂ ਜਿਵੇਂ ਕਿ ਲੋਡ ਵਿੱਚ ਤਬਦੀਲੀ ਮਸ਼ੀਨ ਦੇ ਓਪਰੇਟਿੰਗ ਤਾਪਮਾਨਾਂ ਅਤੇ ਦਬਾਅ ਨੂੰ ਬਦਲ ਸਕਦੀ ਹੈ, ਜਿਸ ਨਾਲ ਸੰਬੰਧਿਤ ਮਸ਼ੀਨਾਂ ਦੇ ਵਿਭਿੰਨ ਥਰਮਲ ਵਿਕਾਸ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਅਲਾਈਨਮੈਂਟ ਤਬਦੀਲੀਆਂ ਹੋ ਸਕਦੀਆਂ ਹਨ।
ਮਸ਼ੀਨਰੀ ਵਾਈਬ੍ਰੇਸ਼ਨ:
ਮਸ਼ੀਨੀ ਵਾਈਬ੍ਰੇਸ਼ਨ ਮਾਪ ਕੰਪੋਨੈਂਟ ਜਾਂ ਮਸ਼ੀਨ ਦੇ ਉਸ ਹਿੱਸੇ ਦੀ ਮਕੈਨੀਕਲ ਗਤੀ ਨੂੰ ਮਾਪਣ ਲਈ ਟ੍ਰਾਂਸਡਿਊਸਰਾਂ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹਨ ਜੋ ਵਾਈਬ੍ਰੇਟ ਕਰ ਰਿਹਾ ਹੈ। ਟਰਾਂਸਡਿਊਸਰ ਇਸ ਮਕੈਨੀਕਲ ਗਤੀ ਨੂੰ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨਲ ਵਿੱਚ ਬਦਲਦੇ ਹਨ। ਟਰਾਂਸਡਿਊਸਰ ਜਾਂ ਤਾਂ ਉਸ ਕੰਪੋਨੈਂਟ ‘ਤੇ ਸਿੱਧਾ ਮਾਊਂਟ ਕੀਤਾ ਜਾਂਦਾ ਹੈ ਜੋ ਚੱਲ ਰਿਹਾ ਹੈ, ਜਾਂ ਇਸ ਨੂੰ ਬੇਅਰਿੰਗ ਜਾਂ ਹੋਰ ਸਪੋਰਟ ਢਾਂਚੇ ‘ਤੇ ਮਾਊਂਟ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਇਹ ਸੈਂਸਰ ਦੇਖੇ ਜਾ ਰਹੇ ਕੰਪੋਨੈਂਟ ਦੀ ਮਕੈਨੀਕਲ ਗਤੀ ਨੂੰ ਮਾਪਦੇ ਹਨ, ਜੋ ਕਿ ਜਾਂ ਤਾਂ ਬੇਅਰਿੰਗ ਹਾਊਸਿੰਗ ਜਾਂ ਸ਼ਾਫਟ ਹੀ ਹੈ।
ਜਿਵੇਂ ਕਿ ਕੰਪੋਨੈਂਟ ਦੀ ਗਤੀ ਸੈਂਸਰ ਵੱਲ ਵਧਦੀ ਹੈ; ਇਹ ਇੱਕ ਸਕਾਰਾਤਮਕ ਵੋਲਟੇਜ ਆਉਟਪੁੱਟ ਪੈਦਾ ਕਰਦਾ ਹੈ, ਜਦੋਂ ਕੰਪੋਨੈਂਟ ਸੈਂਸਰ ਤੋਂ ਦੂਰ ਜਾਂਦਾ ਹੈ; ਇਹ ਇੱਕ ਨਕਾਰਾਤਮਕ ਵੋਲਟੇਜ ਆਉਟਪੁੱਟ ਬਣਾਉਂਦਾ ਹੈ। ਇਹ ਸੈਂਸਰ ਨੂੰ ਇੱਕ ਆਉਟਪੁੱਟ ਇਲੈਕਟ੍ਰੀਕਲ ਸਿਗਨਲ ਪੈਦਾ ਕਰਨ ਦੀ ਆਗਿਆ ਦਿੰਦਾ ਹੈ ਜੋ ਮੂਵਿੰਗ ਕੰਪੋਨੈਂਟ ਦੀ ਗਤੀ ਨੂੰ ਡੁਪਲੀਕੇਟ ਕਰੇਗਾ। ਵੋਲਟੇਜ ਦੀ ਮਾਤਰਾ ਗਤੀ ਦੀ ਮਾਤਰਾ ਨੂੰ ਦਰਸਾਉਂਦੀ ਹੈ।
ਨਿਊਟਨ ਦਾ ਗਤੀ ਦਾ ਦੂਜਾ ਨਿਯਮ ਦੱਸਦਾ ਹੈ ਕਿ F=ma. ਇਹ ਇਸ ਤੱਥ ਵਿੱਚ ਅਨੁਵਾਦ ਕਰਦਾ ਹੈ ਕਿ ਗਤੀ ਦੀ ਮਾਤਰਾ ਉਸ ਬਲ ਦੀ ਮਾਤਰਾ ਨੂੰ ਦਰਸਾਉਂਦੀ ਹੈ ਜੋ ਕੰਪੋਨੈਂਟ ‘ਤੇ ਲਾਗੂ ਕੀਤੀ ਜਾ ਰਹੀ ਹੈ। ਇਸਦਾ ਮਤਲਬ ਕੀ ਹੈ, ਇਹ ਹੈ ਕਿ ਬਹੁਤ ਵੱਡੀਆਂ ਮਸ਼ੀਨਾਂ ‘ਤੇ, ਪੁੰਜ ਨੂੰ ਮਾਪਣਯੋਗ ਮਾਤਰਾ ਨੂੰ ਹਿਲਾਉਣ ਲਈ ਇਹ ਬਹੁਤ ਵੱਡਾ ਨੁਕਸ ਲਵੇਗਾ। ਇਸ ਤੋਂ ਇਲਾਵਾ, ਮਾਪ ਬਣਾਉਣ ਲਈ ਵਰਤਿਆ ਜਾਣ ਵਾਲਾ ਕਿਸਮ ਸੈਂਸਰ ਸੈਂਸਰ ਦੇ ਆਉਟਪੁੱਟ ਨੂੰ ਪ੍ਰਭਾਵਿਤ ਕਰ ਸਕਦਾ ਹੈ।
ਵਾਈਬ੍ਰੇਸ਼ਨ ਮਾਪ:
ਵਾਈਬ੍ਰੇਸ਼ਨ ਮਾਪ ਦੀਆਂ ਦੋ ਕਿਸਮਾਂ ਹਨ: ਸਾਪੇਖਿਕ ਅਤੇ ਸੰਪੂਰਨ ਗਤੀ।
ਸੰਬੰਧਿਤ ਗਤੀ:
ਪਹਿਲਾ ਇੱਕ ਸਾਪੇਖਿਕ ਮਾਪ ਹੈ, ਜੋ ਮਾਪੇ ਗਏ ਹਿੱਸੇ ਦੀ ਗਤੀ ਨੂੰ ਕਿਸੇ ਹੋਰ ਹਿੱਸੇ ਨਾਲ ਜੋੜਦਾ ਹੈ। ਇਹਨਾਂ ਮਾਪਾਂ ਵਿੱਚੋਂ ਸਭ ਤੋਂ ਆਮ ਇੱਕ ਜਰਨਲ ਬੇਅਰਿੰਗ ਦੇ ਅੰਦਰ ਸ਼ਾਫਟ ਦੀ ਗਤੀ ਨੂੰ ਮਾਪਣਾ ਹੈ। ਇਹ ਮਾਪ ਆਮ ਤੌਰ ‘ਤੇ ਗੈਰ-ਸੰਪਰਕ ਐਡੀ ਪ੍ਰੋਬਸ, ਇੱਕ ਸੈਂਸਰ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ, ਜੋ ਕਿ ਜਾਂ ਤਾਂ ਬੇਅਰਿੰਗ ‘ਤੇ ਜਾਂ ਆਪਣੇ ਆਪ ਦੁਆਰਾ ਮਾਊਂਟ ਹੁੰਦਾ ਹੈ। ਇਹ ਮਾਪ ਮਾਰਗ ਦੀ ਪਛਾਣ ਕਰਨ ਲਈ ਬਹੁਤ ਪ੍ਰਭਾਵਸ਼ਾਲੀ ਸਾਬਤ ਹੋਏ ਹਨ ਕਿ ਸ਼ਾਫਟ ਬੇਅਰਿੰਗ ਦੇ ਅੰਦਰ ਘੁੰਮ ਰਿਹਾ ਹੈ ਅਤੇ ਗਤੀ ਦੀ ਮਾਤਰਾ। ਇਹ ਮਾਪ ਵਿਸਥਾਪਨ ਵਿੱਚ ਹਨ, ਜਾਂ ਤਾਂ ਮਿਲ (0.001 ਇੰਚ) ਜਾਂ ਮਾਈਕ੍ਰੋਨ (.000001 ਮੀਟਰ)।
ਇਸ ਕਿਸਮ ਦੇ ਸੈਂਸਰਾਂ ਦਾ ਮੁੱਖ ਫਾਇਦਾ ਇਹ ਹੈ ਕਿ ਮਾਪੀ ਗਤੀ ਦੀ ਤੁਲਨਾ ਕਰਨਾ ਅਤੇ ਅੰਦਰੂਨੀ ਬੇਅਰਿੰਗ ਕਲੀਅਰੈਂਸ ਨਾਲ ਤੁਲਨਾ ਕਰਨਾ ਬਹੁਤ ਆਸਾਨ ਹੈ। ਇੱਕ ਨੁਕਸਾਨ ਇਹ ਹੈ ਕਿ ਜੇ ਉਹ ਭਾਗ ਜਿਸ ‘ਤੇ ਸੈਂਸਰ ਮਾਊਂਟ ਕੀਤਾ ਗਿਆ ਹੈ, ਹਿੱਲ ਰਿਹਾ ਹੈ ਤਾਂ ਸ਼ਾਫਟ ‘ਤੇ ਲਾਗੂ ਕੀਤੇ ਜਾ ਰਹੇ ਬਲਾਂ ਦਾ ਸਹੀ ਮਾਪ ਨਿਰਧਾਰਤ ਨਹੀਂ ਕੀਤਾ ਜਾ ਸਕਦਾ। ਦੂਜਾ ਨੁਕਸਾਨ ਇਹ ਹੈ ਕਿ ਉੱਚ ਫ੍ਰੀਕੁਐਂਸੀ ‘ਤੇ ਵਿਸਥਾਪਨ ਬਹੁਤ ਘੱਟ ਹੋ ਸਕਦਾ ਹੈ, ਅਤੇ ਫਿਰ ਵੀ ਵੱਡਾ ਵਿਸਥਾਪਨ ਹੋ ਸਕਦਾ ਹੈ। ਸਿੱਟੇ ਵਜੋਂ, ਉੱਚ ਫ੍ਰੀਕੁਐਂਸੀ ‘ਤੇ ਨੁਕਸ ਮਾਪੇ ਸਿਗਨਲ ਦੇ ਸ਼ੋਰ ਫਲੋਰ ਵਿੱਚ ਦੱਬੇ ਜਾਣਗੇ।
ਸੰਪੂਰਨ ਗਤੀ:
ਵਾਈਬ੍ਰੇਸ਼ਨ ਦਾ ਦੂਜਾ ਮਾਪ ਪੂਰਨ ਗਤੀ ਹੈ। ਇਹ ਮਾਪ ਇੱਕ ਸੈਂਸਰ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ ਜੋ ਇਸਦੀ ਗਤੀ ਦੀ ਧਰਤੀ ਨਾਲ ਤੁਲਨਾ ਕਰਦਾ ਹੈ। ਸਭ ਤੋਂ ਆਮ ਸੈਂਸਰ ਇੰਡਕਸ਼ਨ ਕਿਸਮ ਦੇ ਸੈਂਸਰ ਹੁੰਦੇ ਹਨ ਜੋ ਇੱਕ ਆਉਟਪੁੱਟ ਵੋਲਟੇਜ ਪੈਦਾ ਕਰਦੇ ਹਨ ਜੋ ਗਤੀ ਦੇ ਵੇਗ ਦੇ ਅਨੁਪਾਤੀ ਹੁੰਦਾ ਹੈ। ਵਧੇਰੇ ਆਮ ਤੌਰ ‘ਤੇ ਵਰਤਿਆ ਜਾਣ ਵਾਲਾ ਸੈਂਸਰ ਇੱਕ ਪਾਈਜ਼ੋਇਲੈਕਟ੍ਰਿਕ ਯੰਤਰ ਹੈ ਜੋ ਬਿਜਲੀ ਦੇ ਚਾਰਜ ਪੈਦਾ ਕਰਦਾ ਹੈ, ਜੋ ਕਿ ਲਾਗੂ ਕੀਤੇ ਗਏ ਬਲ ਨਾਲ ਸਬੰਧਤ ਹਨ।
ਇੰਡਕਸ਼ਨ ਕਿਸਮ ਦੇ ਸੈਂਸਰ ਅਤੇ ਪੀਜ਼ੋਇਲੈਕਟ੍ਰਿਕ ਸੈਂਸਰਾਂ ਦੇ ਫਾਇਦੇ ਅਤੇ ਨੁਕਸਾਨ ਹਨ। ਦੋਵਾਂ ਦਾ ਵੱਡਾ ਨੁਕਸਾਨ ਇਹ ਹੈ ਕਿ ਕਿਉਂਕਿ ਉਹ ਪੂਰਨ ਗਤੀ ਨੂੰ ਮਾਪਦੇ ਹਨ, ਜਿਵੇਂ ਕਿ ਰੋਲਿੰਗ ਐਲੀਮੈਂਟ ਬੇਅਰਿੰਗ ਨੁਕਸ ਦੇ ਸ਼ੁਰੂਆਤੀ ਪੜਾਅ, ਡੂੰਘੇ ਖੂਹ ਵਾਲੇ ਪੰਪਾਂ ਵਿੱਚ ਹਾਈਡ੍ਰੌਲਿਕ ਬਲਾਂ ਦੇ ਅੰਦਰ ਕੈਵੀਟੇਸ਼ਨ ਜਾਂ ਹਾਈਡ੍ਰੌਲਿਕ ਬਲ ਚੌਂਕੀ ਜਾਂ ਬੇਅਰਿੰਗ ਹਾਊਸਿੰਗ ਨੂੰ ਹਿਲਾਉਣ ਲਈ ਕਾਫੀ ਨਹੀਂ ਹਨ।
ਦੂਜਾ ਨੁਕਸਾਨ ਸੈਂਸਰਾਂ ਦੀ ਬਾਰੰਬਾਰਤਾ ਪ੍ਰਤੀਕਿਰਿਆ ਹੈ। ਇੰਡਕਸ਼ਨ ਸੈਂਸਰ ਘੱਟ ਬਾਰੰਬਾਰਤਾ ਅਤੇ ਉੱਚ ਫ੍ਰੀਕੁਐਂਸੀ ਦੋਵਾਂ ‘ਤੇ ਬੁਰੀ ਤਰ੍ਹਾਂ ਸੀਮਤ ਹਨ, ਜਦੋਂ ਕਿ, ਪਾਈਜ਼ੋਇਲੈਕਟ੍ਰਿਕ ਸੈਂਸਰ ਉੱਚ ਫ੍ਰੀਕੁਐਂਸੀ ‘ਤੇ ਸਿਗਨਲਾਂ ਨੂੰ ਵਧਾਏਗਾ। ਉਹ ਦੋਵੇਂ ਸੈਂਸਰ ਦੀਆਂ ਮਾਊਂਟਿੰਗ ਤਕਨੀਕਾਂ ਦੇ ਨਾਲ-ਨਾਲ ਸੈਂਸਰ ਦੀ ਦਿਸ਼ਾ ਜਾਂ ਸਥਾਨ ਦੇ ਕਾਰਨ ਰੇਖਿਕਤਾ ਤਬਦੀਲੀਆਂ ਦੇ ਅਧੀਨ ਵੀ ਹਨ।
ਇਹ ਸੰਵੇਦਕ ਜਿਨ੍ਹਾਂ ਬਲਾਂ ਨੂੰ ਮਾਪਦੇ ਹਨ ਉਹ ਮਾਪ ਦੇ ਬਿੰਦੂ ‘ਤੇ ਮਿਲੀਆਂ ਸਾਰੀਆਂ ਮਕੈਨੀਕਲ ਬਲਾਂ ਦਾ ਸੁਮੇਲ ਹੈ। ਕਿਉਂਕਿ ਜ਼ਿਆਦਾਤਰ ਰੋਟੇਟਿੰਗ ਮਸ਼ੀਨਾਂ ਵਿੱਚ ਬਹੁਤ ਸਾਰੇ ਵੱਖ-ਵੱਖ ਹਿੱਸੇ ਹੁੰਦੇ ਹਨ ਅਤੇ ਇਹਨਾਂ ਵਿੱਚੋਂ ਹਰ ਇੱਕ ਭਾਗ ਮਸ਼ੀਨ ਵਿੱਚ ਕਈ ਵਾਰ ਦੁਹਰਾਉਣ ਵਾਲੀਆਂ ਸ਼ਕਤੀਆਂ ਦਾ ਯੋਗਦਾਨ ਪਾ ਸਕਦਾ ਹੈ, ਮਾਪਿਆ ਗਿਆ ਵਾਈਬ੍ਰੇਸ਼ਨ ਸਿਗਨਲ ਇੱਕ ਗੁੰਝਲਦਾਰ ਸਿਗਨਲ ਹੋਵੇਗਾ ਜਿਸ ਵਿੱਚ ਬਹੁਤ ਸਾਰੇ ਸਿਗਨਲ ਹੁੰਦੇ ਹਨ।
ਮਸ਼ੀਨਰੀ ਵਾਈਬ੍ਰੇਸ਼ਨ ਵਿਸ਼ਲੇਸ਼ਣ (MVA):
ਮਸ਼ੀਨਰੀ ਵਾਈਬ੍ਰੇਸ਼ਨ ਵਿਸ਼ਲੇਸ਼ਣ ਦੀ ਪ੍ਰਕਿਰਿਆ ਮਸ਼ੀਨੀ ਵਾਈਬ੍ਰੇਸ਼ਨ ਵਿੱਚ ਮੌਜੂਦ ਬਾਰੰਬਾਰਤਾਵਾਂ ਦੀ ਪਛਾਣ ਕਰਦੀ ਹੈ ਅਤੇ ਫਿਰ ਉਹਨਾਂ ਨੂੰ ਮਕੈਨੀਕਲ ਅਤੇ ਬਿਜਲਈ ਨੁਕਸ ਦੁਆਰਾ ਬਣਾਏ ਗਏ ਬਲਾਂ ਦੀ ਬਾਰੰਬਾਰਤਾ ਨਾਲ ਸਬੰਧਿਤ ਕਰਦੀ ਹੈ।
ਮਾਪਿਆ ਸਿਗਨਲ ਵਿੱਚ ਮੌਜੂਦ ਫ੍ਰੀਕੁਐਂਸੀਜ਼ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰਨ ਲਈ, ਵਿਸ਼ਲੇਸ਼ਕ ਸਿਗਨਲ ‘ਤੇ ਇੱਕ ਫਾਸਟ ਫੁਰੀਅਰ ਟ੍ਰਾਂਸਫਾਰਮ (FFT) ਕਰਦਾ ਹੈ। ਇਹ ਗਣਿਤਿਕ ਪ੍ਰਕਿਰਿਆ ਇਕੱਠੇ ਕੀਤੇ ਗੁੰਝਲਦਾਰ ਸਮਾਂ ਅਧਾਰਤ ਸਿਗਨਲ ਨੂੰ ਟਾਈਮ ਡੋਮੇਨ ਤੋਂ ਬਾਰੰਬਾਰਤਾ ਡੋਮੇਨ ਵਿੱਚ ਬਦਲਦੀ ਹੈ। FFT ਉਹਨਾਂ ਐਂਪਲੀਟਿਊਡਸ ਅਤੇ ਫ੍ਰੀਕੁਐਂਸੀ ਦੀ ਪਛਾਣ ਕਰਦਾ ਹੈ ਜੋ ਇਸ ਗੁੰਝਲਦਾਰ ਸਿਗਨਲ ਨੂੰ ਬਣਾਉਣ ਲਈ ਇਕੱਠੇ ਮਿਲਾਏ ਜਾਂਦੇ ਹਨ।
ਮਕੈਨੀਕਲ ਨੁਕਸ:
ਇੱਥੇ ਬਹੁਤ ਸਾਰੇ ਚਾਰਟ, ਟੇਬਲ ਅਤੇ ਕਾਗਜ਼ ਹਨ ਜੋ ਫ੍ਰੀਕੁਐਂਸੀ ਦਾ ਵਰਣਨ ਕਰਦੇ ਹਨ ਜੋ ਇਹਨਾਂ ਵਿੱਚੋਂ ਹਰੇਕ ਮਕੈਨੀਕਲ ਨੁਕਸ ਪੈਦਾ ਕਰਦੇ ਹਨ, ਜਦੋਂ ਇਹ ਨੁਕਸ ਮੌਜੂਦ ਹੁੰਦੇ ਹਨ। ਇਹਨਾਂ ਵਿੱਚੋਂ ਕਈ ਨੁਕਸ ਇੱਕੋ ਨੁਕਸ ਦੀ ਬਾਰੰਬਾਰਤਾ ਪੈਦਾ ਕਰਦੇ ਹਨ। ਨੁਕਸ ਜਿਵੇਂ ਕਿ ਅਸੰਤੁਲਨ, ਮਿਸਲਾਇਨਮੈਂਟ, ਬੈਂਟ ਸ਼ਾਫਟ, ਕ੍ਰੈਕਡ ਸ਼ਾਫਟ ਅਤੇ ਇੱਕ ਸਨਕੀ ਰੋਟਰ ਸਾਰੇ ਰੋਟਰ ‘ਤੇ ਨੁਕਸ ਦੁਆਰਾ ਬਣਾਏ ਗਏ ਹਨ ਅਤੇ ਉਹ ਬਲ ਪੈਦਾ ਕਰਨਗੇ ਜੋ ਸ਼ਾਫਟ ਰੋਟੇਸ਼ਨਲ ਸਪੀਡ ਨਾਲ ਸਬੰਧਤ ਹਨ। ਬਹੁਤ ਸਾਰੇ ਮਾਮਲਿਆਂ ਵਿੱਚ, ਇਹਨਾਂ ਸਮਾਨ ਸਮੱਸਿਆਵਾਂ ਨੂੰ ਹੋਰ ਪਰਿਭਾਸ਼ਿਤ ਕਰਨ ਲਈ ਵਾਧੂ ਮਾਪ ਕਰਨ ਜਾਂ ਵਾਧੂ ਤਕਨਾਲੋਜੀਆਂ ਦੀ ਵਰਤੋਂ ਕਰਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ।
ਹੋਰ ਸਮੱਸਿਆਵਾਂ ਜਿਵੇਂ ਕਿ ਰੋਲਿੰਗ ਐਲੀਮੈਂਟ ਬੇਅਰਿੰਗ ਨੁਕਸਾਂ ਵਿੱਚ ਬਾਰੰਬਾਰਤਾ ਹੁੰਦੀ ਹੈ ਜੋ ਨੁਕਸ ਦੇ ਪੜਾਅ ਦੇ ਨਾਲ-ਨਾਲ ਬੇਅਰਿੰਗ ਦੀ ਜਿਓਮੈਟਰੀ ‘ਤੇ ਨਿਰਭਰ ਹੁੰਦੀਆਂ ਹਨ। ਰੋਲਿੰਗ ਐਲੀਮੈਂਟ ਬੇਅਰਿੰਗ ਨੁਕਸਾਂ ਨਾਲ ਇੱਕ ਸਮੱਸਿਆ ਇਹ ਹੈ ਕਿ ਸ਼ੁਰੂਆਤੀ ਪੜਾਵਾਂ ਵਿੱਚ ਨੁਕਸ ਬਹੁਤ ਘੱਟ ਐਪਲੀਟਿਊਡ ਸਿਗਨਲ ਪੈਦਾ ਕਰਦੇ ਹਨ ਅਤੇ ਵਿਕਾਸਸ਼ੀਲ ਨੁਕਸ ਦੇ ਸ਼ੁਰੂਆਤੀ ਪੜਾਵਾਂ ਵਿੱਚ ਪਛਾਣਨਾ ਮੁਸ਼ਕਲ ਹੁੰਦਾ ਹੈ।
ਇਲੈਕਟ੍ਰੀਕਲ ਨੁਕਸ:
ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰਾਂ ਰੋਟਰ ਅਤੇ ਸਟੇਟਰ ‘ਤੇ ਚੁੰਬਕੀ ਖੇਤਰਾਂ ਦੇ ਪਰਸਪਰ ਪ੍ਰਭਾਵ ਦੁਆਰਾ ਕੰਮ ਕਰਦੀਆਂ ਹਨ। ਜੇਕਰ ਸਟੇਟਰ ਜਾਂ ਰੋਟਰ ‘ਤੇ ਚੁੰਬਕੀ ਖੇਤਰ ਅਸੰਤੁਲਿਤ ਜਾਂ ਵਿਗੜ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਇਹ ਮੋਟਰ ਦੇ ਅੰਦਰ ਅਸੰਤੁਲਿਤ ਬਿਜਲਈ ਬਲ ਪੈਦਾ ਕਰੇਗਾ। ਇਹ ਸ਼ਕਤੀਆਂ ਰੋਟਰ ਨੂੰ ਮੋਟਰ ਦੇ ਅੰਦਰ ਜਾਣ ਦਾ ਕਾਰਨ ਬਣਾਉਂਦੀਆਂ ਹਨ ਕਿਉਂਕਿ ਘੁੰਮਦੀ ਚੁੰਬਕੀ ਖੇਤਰ ਵਿਗਾੜ ਜਾਂ ਅਸੰਤੁਲਿਤ ਖੇਤਰਾਂ ਨੂੰ ਲੰਘਦੀ ਹੈ।
ਸਟੇਟਰ ਇਲੈਕਟ੍ਰੀਕਲ ਨੁਕਸ:
ਕੋਰ ਦੀ ਸ਼ਕਲ ਚੁੰਬਕੀ ਖੇਤਰ ਦੁਆਰਾ ਨਿਰਧਾਰਤ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਸਟੈਟਰ ਕੋਰ ਅਤੇ ਰੋਟਰ ਦੋਵੇਂ ਆਮ ਤੌਰ ‘ਤੇ ਪੂਰੀ ਤਰ੍ਹਾਂ ਗੋਲ ਹੋਣ ਲਈ ਤਿਆਰ ਕੀਤੇ ਗਏ ਹਨ।
ਅਸਮਾਨ ਹਵਾ ਅੰਤਰ:
ਇੱਕ ਬਿਲਕੁਲ ਗੋਲ ਸਟੇਟਰ ਦੇ ਅੰਦਰ ਬਿਲਕੁਲ ਗੋਲ ਰੋਟਰ ਨੂੰ ਕੇਂਦਰਿਤ ਕਰਨ ਨਾਲ ਸਾਰੀਆਂ ਚੁੰਬਕੀ ਬਲਾਂ ਬਰਾਬਰ ਅਤੇ ਉਲਟ ਹੋਣਗੀਆਂ। ਹਾਲਾਂਕਿ, ਜੇਕਰ ਰੋਟਰ ਨੂੰ ਕਿਸੇ ਵੀ ਖੇਤਰ ਵਿੱਚ ਸਟੇਟਰ ਦੇ ਨੇੜੇ ਰੱਖਿਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਜਿਵੇਂ ਹੀ ਚੁੰਬਕੀ ਖੇਤਰ ਤੰਗ ਕਲੀਅਰੈਂਸ ਤੋਂ ਲੰਘਦਾ ਹੈ, ਇੱਕ ਮਜ਼ਬੂਤ ਆਕਰਸ਼ਨ ਹੋਵੇਗਾ, ਰੋਟਰ ਨੂੰ ਸਟੇਟਰ ਵੱਲ ਖਿੱਚੇਗਾ ਅਤੇ ਰੋਟਰ ਦੇ ਉਲਟ ਪਾਸੇ ਵੱਲ ਇੱਕ ਕਮਜ਼ੋਰ ਖਿੱਚ ਹੋਵੇਗੀ। ਜਿੱਥੇ ਵਿਆਪਕ ਕਲੀਅਰੈਂਸ ਹੈ। ਇਹ ਇੱਕ ਬਿਜਲੀ ਅਸੰਤੁਲਨ ਪੈਦਾ ਕਰੇਗਾ ਅਤੇ ਇੱਕ ਅਸਮਾਨ ਹਵਾ ਪਾੜੇ ਵਜੋਂ ਜਾਣਿਆ ਜਾਂਦਾ ਹੈ।
ਸਟੇਟਰ ਦੇ ਅੰਦਰ ਰੋਟਰ ਦੀ ਸਥਿਤੀ ਬੇਅਰਿੰਗਸ ਦੀ ਸਥਿਤੀ ਦੁਆਰਾ ਨਿਰਧਾਰਤ ਕੀਤੀ ਜਾਂਦੀ ਹੈ (ਅੰਜੀਰ 2 ਦੇਖੋ). ਬੇਅਰਿੰਗ ਨੂੰ ਬੇਅਰਿੰਗ ਹਾਊਸਿੰਗ, ਐਂਡ ਘੰਟੀ ਅਤੇ ਮਸ਼ੀਨ ਫਰੇਮ ਦੇ ਮਸ਼ੀਨ ਫਿੱਟ ਦੁਆਰਾ ਸਥਿਤੀ ਵਿੱਚ ਰੱਖਿਆ ਜਾਂਦਾ ਹੈ। ਕਿਉਂਕਿ ਤੰਗ ਕਲੀਅਰੈਂਸਾਂ ਰੋਟਰ ਦੀ ਸਥਿਤੀ ਦੁਆਰਾ ਨਿਰਧਾਰਤ ਕੀਤੀਆਂ ਜਾਂਦੀਆਂ ਹਨ, ਅਸਮਾਨ ਕਲੀਅਰੈਂਸ ਹਮੇਸ਼ਾ ਏਅਰ ਗੈਪ ਦੇ ਅੰਦਰ ਉਸੇ ਸਥਾਨ ‘ਤੇ ਹੋਣਗੀਆਂ ਅਤੇ ਇਸਨੂੰ ਆਮ ਤੌਰ ‘ਤੇ ਸਥਿਰ ਸੰਕੀਰਣਤਾ ਕਿਹਾ ਜਾਂਦਾ ਹੈ।
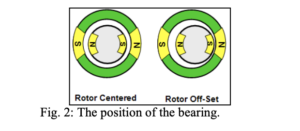
ਇਹ ਨਿਰਧਾਰਿਤ ਕੀਤਾ ਗਿਆ ਹੈ ਕਿ ਇੱਕ 2000 HP, ਦੋ ਖੰਭੇ ਮੋਟਰ ‘ਤੇ, ਜਿੱਥੇ ਰੋਟਰ ਏਅਰ ਗੈਪ ਨੂੰ ਸਟੇਟਰ ਦੇ ਅੰਦਰ 10% ਦੁਆਰਾ ਔਫਸੈੱਟ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਬਣਾਏ ਗਏ ਬਿਜਲਈ ਬਲ, ਜੇ ਰੋਟਰ ਸੰਤੁਲਿਤ ਹੈ ਤਾਂ ਬਣਾਏ ਗਏ ਸੈਂਟਰਿਫਿਊਗਲ ਬਲ ਨਾਲੋਂ 10 ਗੁਣਾ ਵੱਧ ਹੋਣਗੇ। G 2.5 ਦਾ ਇੱਕ ISO ਸੰਤੁਲਨ ਸਪੈੱਕ। G2.5 ਦਾ ਇੱਕ ਸੰਤੁਲਨ ਸਪੈੱਕ ਇੱਕ ਚੰਗਾ ਸੰਤੁਲਨ ਮੰਨਿਆ ਜਾਂਦਾ ਹੈ।
ਨਰਮ ਪੈਰ ਆਮ ਤੌਰ ‘ਤੇ ਗਲਤ ਅਲਾਈਨਮੈਂਟ ਨਾਲ ਜੁੜਿਆ ਹੁੰਦਾ ਹੈ, ਹਾਲਾਂਕਿ, ਜੇਕਰ ਮੋਟਰ ਦਾ ਇੱਕ ਗਲਤ ਨਰਮ ਪੈਰ ਹੈ, ਤਾਂ ਹੋਲਡ ਡਾਊਨ ਬੋਲਟ ਨੂੰ ਕੱਸਣ ਨਾਲ ਨਾ ਸਿਰਫ ਬੇਅਰਿੰਗ ਸਥਿਤੀ ਨੂੰ ਮੁੜ ਸਥਾਪਿਤ ਕੀਤਾ ਜਾਵੇਗਾ, ਇੱਕ ਸੰਭਾਵਿਤ ਗਲਤ ਅਲਾਈਨਮੈਂਟ ਪੈਦਾ ਹੋਵੇਗਾ, ਪਰ ਇਹ ਮੋਟਰ ਦੇ ਕੇਸਿੰਗ ਨੂੰ ਵੀ ਵਿਗਾੜ ਦੇਵੇਗਾ (ਵੇਖੋ ਚਿੱਤਰ 3. ).
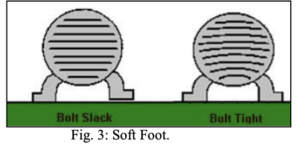
ਇਹ ਵਿਗਾੜਿਆ ਹੋਇਆ ਕੇਸਿੰਗ ਸਟੇਟਰ ਆਇਰਨ ਨੂੰ ਵਿਗਾੜ ਦੇਵੇਗਾ, ਜੋ ਫਿਰ ਸਟੇਟਰ ਚੁੰਬਕੀ ਖੇਤਰ ਨੂੰ ਬਦਲ ਦੇਵੇਗਾ ਅਤੇ ਅਸਮਾਨ ਹਵਾ ਦੇ ਪਾੜੇ ਵਰਗੀ ਸਥਿਤੀ ਪੈਦਾ ਕਰੇਗਾ।
ਢਿੱਲੀ ਵਿੰਡਿੰਗ/ਸਟੇਟਰ ਆਇਰਨ:
ਜੇ ਮੋਟਰ ਫਰੇਮ ਵਿੱਚ ਸਟੈਟਰ ਆਇਰਨ ਢਿੱਲਾ ਹੈ, ਜਾਂ ਸਟੇਟਰ ਸਲਾਟ ਵਿੱਚ ਵਿੰਡਿੰਗ ਢਿੱਲੀ ਹੈ, ਤਾਂ ਸਟੈਟਰ ਤੋਂ ਘੁੰਮਦਾ ਚੁੰਬਕੀ ਖੇਤਰ ਢਿੱਲੇ ਹਿੱਸੇ ਨੂੰ ਹਰ ਵਾਰ ਚੁੰਬਕੀ ਖੇਤਰ ਵਿੱਚੋਂ ਇੱਕ ਦੇ ਢਿੱਲੇ ਹਿੱਸੇ ਤੋਂ ਲੰਘਣ ‘ਤੇ ਹਿਲਾਉਣ ਦਾ ਕਾਰਨ ਬਣੇਗਾ। ਇਹ ਤਿੰਨ ਨੁਕਸ ਆਮ ਤੌਰ ‘ਤੇ ਵਾਈਬ੍ਰੇਸ਼ਨ ਸਮੱਸਿਆਵਾਂ ਦਾ ਕਾਰਨ ਹੁੰਦੇ ਹਨ ਜਿਨ੍ਹਾਂ ਨੂੰ ਸਟੇਟਰ ਇਲੈਕਟ੍ਰੀਕਲ ਵਜੋਂ ਸ਼੍ਰੇਣੀਬੱਧ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਇਹਨਾਂ ਨੁਕਸਾਂ ਦੀ ਬਾਰੰਬਾਰਤਾ ਦੋ ਵਾਰ ਲਾਈਨ ਫ੍ਰੀਕੁਐਂਸੀ ‘ਤੇ ਹੁੰਦੀ ਹੈ। ਡਾਇਰੈਕਟ ਡਰਾਈਵ ਕੰਟਰੋਲਰ ‘ਤੇ, ਇਹ 60 Hz ਲਈ 7200 CPM ਅਤੇ 50 Hz ਐਪਲੀਕੇਸ਼ਨਾਂ ਲਈ 6000 CPM ਹੋਵੇਗਾ।
ਰੋਟਰ ਇਲੈਕਟ੍ਰੀਕਲ ਨੁਕਸ:
ਸਭ ਤੋਂ ਆਮ ਉਦਯੋਗਿਕ ਮੋਟਰ AC ਸਕੁਇਰਲ ਪਿੰਜਰੇ ਇੰਡਕਸ਼ਨ ਰੋਟਰ ਹੈ। ਇਹ ਰੋਟਰ ਰੋਟਰ ‘ਤੇ ਚੁੰਬਕੀ ਖੇਤਰ ਬਣਾਉਣ ਲਈ ਕੰਡਕਟਰ ਵਜੋਂ ਰੋਟਰ ਬਾਰਾਂ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹਨ। ਰੋਟਰ ਆਇਰਨ ਜਾਂ ਕੋਰ ਦੀ ਸ਼ਕਲ ਚੁੰਬਕੀ ਖੇਤਰ ਦੁਆਰਾ ਨਿਰਧਾਰਤ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
ਸਨਕੀ ਰੋਟਰ:
ਜੇ ਰੋਟਰ ਕੋਰ ਆਇਰਨ ਜਾਂ ਸਿਰੇ ਦੀਆਂ ਰਿੰਗਾਂ ਸਨਕੀ ਹਨ ਤਾਂ ਇਹ ਰੋਟਰ ਦੇ ਚੁੰਬਕੀ ਖੇਤਰ ਨੂੰ ਵਿਗਾੜ ਦੇਵੇਗਾ ਅਤੇ ਇਹ ਕੋਰ ਦਾ ਆਕਾਰ ਲੈ ਲਵੇਗਾ। ਜਦੋਂ ਇਕਸੈਂਟ੍ਰਿਕ ਰੋਟਰ ਨੂੰ ਕੇਂਦਰਿਤ ਸਟੇਟਰ ਦੇ ਅੰਦਰ ਰੱਖਿਆ ਜਾਂਦਾ ਹੈ ਤਾਂ ਇਹ ਰੋਟਰ ਚੁੰਬਕੀ ਖੇਤਰ ਅਤੇ ਸਟੇਟਰ ਚੁੰਬਕੀ ਖੇਤਰ ਦੇ ਵਿਚਕਾਰ ਅਸਮਾਨ ਕਲੀਅਰੈਂਸ ਬਣਾਏਗਾ। ਹਾਲਾਂਕਿ, ਕਿਉਂਕਿ ਵਿਗੜਿਆ ਚੁੰਬਕੀ ਖੇਤਰ ਰੋਟਰ ‘ਤੇ ਹੈ, ਇਸ ਲਈ ਤੰਗ ਕਲੀਅਰੈਂਸ ਸ਼ਾਫਟ ਦੇ ਨਾਲ ਬਦਲ ਜਾਵੇਗੀ। ਜਦੋਂ ਤੰਗ ਕਲੀਅਰੈਂਸ ਇੱਕ ਚੁੰਬਕੀ ਖੰਭੇ ਦੇ ਹੇਠਾਂ ਸਥਿਤ ਹੁੰਦੀ ਹੈ ਤਾਂ ਇੱਕ ਇਲੈਕਟ੍ਰੀਕਲ ਅਸੰਤੁਲਨ ਬਣਾਇਆ ਜਾਵੇਗਾ। ਕਿਉਂਕਿ ਰੋਟਰ ਸਥਿਤੀ ਦੇ ਨਾਲ ਇਲੈਕਟ੍ਰੀਕਲ ਅਸੰਤੁਲਨ ਬਦਲਦਾ ਹੈ, ਇਸ ਨੁਕਸ ਨੂੰ ਅਕਸਰ ਗਤੀਸ਼ੀਲ eccentricity ਕਿਹਾ ਜਾਂਦਾ ਹੈ।
ਟੁੱਟੀਆਂ ਰੋਟਰ ਬਾਰ:
ਸਕੁਇਰਲ ਕੇਜ ਰੋਟਰ ‘ਤੇ ਰੋਟਰ ਬਾਰਾਂ ਦਾ ਉਦੇਸ਼ ਰੋਟਰ ਦੇ ਇੱਕ ਸਿਰੇ ਤੋਂ ਦੂਜੇ ਸਿਰੇ ਤੱਕ ਮੌਜੂਦਾ ਪ੍ਰਵਾਹ ਲਈ ਇੱਕ ਮਾਰਗ ਪ੍ਰਦਾਨ ਕਰਨਾ ਹੈ। ਮੌਜੂਦਾ ਪ੍ਰਵਾਹ ਰੋਟਰ ‘ਤੇ ਇੱਕ ਚੁੰਬਕੀ ਖੇਤਰ ਬਣਾਏਗਾ। ਜਦੋਂ ਕਰੰਟ ਇੱਕ ਦਿਸ਼ਾ ਵਿੱਚ ਵਹਿੰਦਾ ਹੈ ਤਾਂ ਇਹ ਇੱਕ ਧਰੁਵੀਤਾ ਦਾ ਇੱਕ ਚੁੰਬਕੀ ਖੇਤਰ ਬਣਾਏਗਾ, ਜਾਂ ਤਾਂ ਉੱਤਰ ਜਾਂ ਦੱਖਣ ਵੱਲ। ਇਹ ਵਿਰੋਧੀ ਧਰੁਵ ਸਿੱਧੇ ਤੌਰ ‘ਤੇ ਇੱਕ ਦੂਜੇ ਤੋਂ ਪਾਰ ਹੋਣਗੇ ਅਤੇ ਇੱਕ ਸੰਤੁਲਿਤ ਚੁੰਬਕੀ ਖੇਤਰ ਬਣਾਉਣਗੇ।
ਜੇਕਰ ਰੋਟਰ ਬਾਰਾਂ ਵਿੱਚੋਂ ਇੱਕ ਜਾਂ ਇੱਕ ਤੋਂ ਵੱਧ ਟੁੱਟੇ ਹੋਏ ਹਨ, ਤਾਂ ਰੋਟਰ ਦੇ ਉਸ ਹਿੱਸੇ ਵਿੱਚ ਕਰੰਟ ਨਹੀਂ ਵਗੇਗਾ ਜਦੋਂ ਇਹ ਚੁੰਬਕੀ ਖੇਤਰਾਂ ਵਿੱਚੋਂ ਇੱਕ ਦੇ ਹੇਠਾਂ ਸਥਿਤ ਹੈ। ਹਾਲਾਂਕਿ, ਕਿਉਂਕਿ ਬ੍ਰੇਕ ਦੇ ਦੋਵੇਂ ਪਾਸੇ ਦੀਆਂ ਬਾਰਾਂ ਜੁੜੀਆਂ ਹੋਈਆਂ ਹਨ, ਕਰੰਟ ਇਹਨਾਂ ਬਾਰਾਂ ਵਿੱਚੋਂ ਲੰਘੇਗਾ ਬਸ਼ਰਤੇ ਕਰੰਟ ਦੇ ਪ੍ਰਵਾਹ ਲਈ ਇੱਕ ਪੂਰਾ ਮਾਰਗ ਹੋਵੇ। ਇਹ ਟੁੱਟੀ ਪੱਟੀ ਜਾਂ ਬਾਰਾਂ ਦੇ ਸਥਾਨ ‘ਤੇ ਰੋਟਰ ‘ਤੇ ਇੱਕ ਡੈੱਡ ਸਪਾਟ ਬਣਾਉਂਦਾ ਹੈ। ਜਦੋਂ ਇਹ ਡੈੱਡ ਸਪਾਟ ਚੁੰਬਕੀ ਖੇਤਰਾਂ ਵਿੱਚੋਂ ਇੱਕ ਦੇ ਹੇਠਾਂ ਸਥਿਤ ਹੁੰਦਾ ਹੈ ਤਾਂ ਇੱਕ ਬਿਜਲੀ ਅਸੰਤੁਲਨ ਪੈਦਾ ਹੋ ਜਾਵੇਗਾ। ਇਹ ਬਿਜਲਈ ਅਸੰਤੁਲਨ ਰੋਟਰ ਸਿਸਟਮ ਤੇ ਕੰਮ ਕਰਨ ਵਾਲੀਆਂ ਕਿਸੇ ਵੀ ਮਕੈਨੀਕਲ ਬਲਾਂ ਨੂੰ ਜੋੜ ਦੇਵੇਗਾ ਅਤੇ ਕੁੱਲ ਰੋਟਰ ਬਲਾਂ ਨੂੰ ਬਦਲ ਦੇਵੇਗਾ।
ਟੁੱਟੀਆਂ ਬਾਰਾਂ ਅਤੇ ਸਨਕੀ ਰੋਟਰ ਦੋਵੇਂ ਰੋਟਰ ‘ਤੇ ਮਕੈਨੀਕਲ ਨੁਕਸ ਹਨ, ਅਤੇ ਰੋਟਰ ਦੇ ਨਾਲ ਘੁੰਮਣਗੇ। ਇੱਕ ਇੰਡਕਸ਼ਨ ਮੋਟਰ ਵਿੱਚ ਰੋਟਰ ਇੱਕ ਅਜਿਹੀ ਗਤੀ ਤੇ ਘੁੰਮਦਾ ਹੈ ਜੋ ਰੋਟੇਟਿੰਗ ਮੈਗਨੈਟਿਕ ਫੀਲਡ ਦੀ ਗਤੀ ਤੋਂ ਘੱਟ ਹੈ, ਇਸਲਈ ਮਕੈਨੀਕਲ ਨੁਕਸ ਚੁੰਬਕੀ ਖੇਤਰਾਂ ਦੇ ਹੇਠਾਂ ਅੰਦਰ ਅਤੇ ਬਾਹਰ ਚਲੇ ਜਾਣਗੇ। ਜਿਵੇਂ ਕਿ ਨੁਕਸ ਵਾਲਾ ਰੋਟਰ ਘੁੰਮਦਾ ਹੈ, ਚੁੰਬਕੀ ਖੇਤਰ ਦੇ ਸਬੰਧ ਵਿੱਚ ਟੁੱਟੀਆਂ ਬਾਰਾਂ ਦੀ ਸਥਿਤੀ ਦੇ ਅਧਾਰ ਤੇ ਰੋਟਰ ‘ਤੇ ਕੰਮ ਕਰਨ ਵਾਲੀਆਂ ਬਿਜਲਈ ਸ਼ਕਤੀਆਂ ਵਧਣ ਅਤੇ ਘਟਣਗੀਆਂ। ਇਹ ਸੰਯੁਕਤ ਬਿਜਲਈ ਅਤੇ ਮਕੈਨੀਕਲ ਬਲਾਂ ਨੂੰ ਮੋਡਿਊਲੇਟ ਕਰਨ ਦਾ ਕਾਰਨ ਬਣਦਾ ਹੈ। ਮੋਡੂਲੇਸ਼ਨ ਦੀ ਬਾਰੰਬਾਰਤਾ ਰੋਟਰ ਦੀ ਸਲਿੱਪ ਸਪੀਡ ਦੁਆਰਾ ਗੁਣਾ ਕੀਤੇ ਖੰਭਿਆਂ ਦੀ ਸੰਖਿਆ ਦੇ ਬਰਾਬਰ ਹੋਵੇਗੀ। ਇਸ ਬਾਰੰਬਾਰਤਾ ਨੂੰ ਆਮ ਤੌਰ ‘ਤੇ ਪੋਲ ਪਾਸ ਫ੍ਰੀਕੁਐਂਸੀ (PPF) ਕਿਹਾ ਜਾਂਦਾ ਹੈ।
ਥਰਮਲ ਸੰਵੇਦਨਸ਼ੀਲ ਰੋਟਰ:
ਕੁਝ AC ਇੰਡਕਸ਼ਨ ਮੋਟਰ ਰੋਟਰ’ ਦਿਖਾਈ ਦਿੰਦੇ ਹਨ ਕਿ ਰੋਟਰ ਤੋਂ ਆਉਣ ਵਾਲੀਆਂ ਸ਼ਕਤੀਆਂ ਲੋਡ ਨਾਲ ਬਦਲਦੀਆਂ ਹਨ। ਇਹ ਆਮ ਤੌਰ ‘ਤੇ ਵਾਪਰਦਾ ਹੈ ਕਿਉਂਕਿ ਰੋਟਰ ਝੁਕਦੇ ਹਨ ਜਿਵੇਂ ਕਿ ਕਰੰਟ ਵਹਿੰਦਾ ਹੈ ਅਤੇ ਰੋਟਰ ਵਧਦਾ ਹੈ। ਅਜਿਹਾ ਹੋਣ ਦਾ ਕਾਰਨ ਛੋਟੇ ਕੋਰ ਲੈਮੀਨੇਸ਼ਨਾਂ, ਰੋਟਰ ਲੈਮੀਨੇਸ਼ਨਾਂ ਦੀ ਗੈਰ-ਯੂਨੀਫਾਰਮ ਮੋਟਾਈ, ਜਾਂ ਕਾਸਟ ਰੋਟਰਾਂ ਵਿੱਚ ਕਾਸਟਿੰਗ ਵੋਇਡਸ ਦਾ ਨਤੀਜਾ ਹੈ। ਉਪਰੋਕਤ ਵਿੱਚੋਂ ਕਿਸੇ ਵੀ ਕੇਸ ਵਿੱਚ, ਰੋਟਰ ਦਾ ਇੱਕ ਪਾਸਾ ਵਿਰੋਧੀ ਪਾਸੇ ਨਾਲੋਂ ਗਰਮ ਹੋ ਜਾਂਦਾ ਹੈ, ਇਸ ਤਰ੍ਹਾਂ ਰੋਟਰ ਦੇ ਗਰਮ ਹਿੱਸੇ ਨੂੰ ਖਿੱਚਣ ਜਾਂ ਫੈਲਣ ਦੀ ਆਗਿਆ ਦਿੰਦਾ ਹੈ ਜਿਸ ਨਾਲ ਰੋਟਰ ਝੁਕ ਜਾਂਦਾ ਹੈ। ਝੁਕਿਆ ਹੋਇਆ ਰੋਟਰ ਰੋਟਰ ਨੂੰ ਅਕੇਂਦਰੀ ਤੌਰ ‘ਤੇ ਕੰਮ ਕਰਨ ਅਤੇ ਇੱਕ ਗਤੀਸ਼ੀਲ ਸਨਕੀ ਦੇ ਰੂਪ ਵਿੱਚ ਦਿਖਾਈ ਦੇਵੇਗਾ।
ਜਦੋਂ ਨੁਕਸ ਰੋਟਰ ਦੇ ਚੁੰਬਕੀ ਖੇਤਰ ਨੂੰ ਪ੍ਰਭਾਵਿਤ ਕਰਦਾ ਹੈ, ਤਾਂ ਅਸੰਤੁਲਿਤ ਬਲ ਸੰਯੁਕਤ ਰੋਟਰ ਬਲਾਂ ਨੂੰ ਮੋਡਿਊਲੇਟ ਕਰਨ ਦਾ ਕਾਰਨ ਬਣਦੇ ਹਨ। ਇਹ ਰੋਟੇਟਿੰਗ ਸਪੀਡ ‘ਤੇ ਮਸ਼ੀਨਰੀ ਵਾਈਬ੍ਰੇਸ਼ਨ ਦੇ ਐਪਲੀਟਿਊਡ ਨੂੰ ਵੀ ਮੋਡਿਊਲੇਟ ਕਰਨ ਦਾ ਕਾਰਨ ਬਣੇਗਾ। ਇੱਕ ਐਂਪਲੀਟਿਊਡ-ਮੋਡਿਊਲੇਟਡ ਸਿਗਨਲ ਦੀ FFT ਬੁਨਿਆਦੀ ਬਾਰੰਬਾਰਤਾ ਦੇ ਆਲੇ-ਦੁਆਲੇ ਸਾਈਡਬੈਂਡ ਪੈਦਾ ਕਰੇਗੀ, ਜੋ ਕਿ ਇਸ ਮਾਮਲੇ ਵਿੱਚ ਚੱਲ ਰਹੀ ਗਤੀ ਤੋਂ ਇੱਕ ਗੁਣਾ ਹੈ। ਸਾਈਡਬੈਂਡ ਦੀ ਮੌਜੂਦਗੀ ਦਰਸਾਉਂਦੀ ਹੈ ਕਿ ਐਂਪਲੀਟਿਊਡ ਮੋਡੂਲੇਸ਼ਨ ਮੌਜੂਦ ਹੈ ਅਤੇ ਸਾਈਡਬੈਂਡਸ ਦੀ ਸਪੇਸਿੰਗ ਮੋਡੂਲੇਸ਼ਨ ਦੀ ਬਾਰੰਬਾਰਤਾ ਨੂੰ ਦਰਸਾਉਂਦੀ ਹੈ। ਜੇਕਰ ਰੋਟਰ ਤੋਂ ਨੁਕਸ ਆ ਰਿਹਾ ਹੈ ਤਾਂ ਸਾਈਡਬੈਂਡ ਪੋਲ ਪਾਸ ਬਾਰੰਬਾਰਤਾ ‘ਤੇ ਵਿੱਥ ਰੱਖੇ ਜਾਣਗੇ। ਕਿਉਂਕਿ ਉੱਪਰ ਦੱਸੇ ਗਏ ਤਿੰਨ ਆਮ ਰੋਟਰ ਨੁਕਸਾਂ ਵਿੱਚੋਂ ਹਰੇਕ ਕਾਰਨ ਰੋਟਰ ਫੋਰਸ ਹਰ ਇੱਕ ਫਾਲਟ ਦੇ FFT ਨੂੰ ਮੋਡੀਲੇਟ ਕਰਨ ਦਾ ਕਾਰਨ ਬਣਦੀ ਹੈ, PPF ਸਾਈਡਬੈਂਡ ਦੇ ਨਾਲ ਰੋਟੇਟਿੰਗ ਸਪੀਡ ‘ਤੇ ਇੱਕ ਸਪੈਕਟ੍ਰਲ ਪੀਕ ਦੇ ਰੂਪ ਵਿੱਚ ਦਿਖਾਈ ਦੇਵੇਗੀ।
ਮਕੈਨੀਕਲ ਨੁਕਸ:
ਮੋਟਰ ‘ਤੇ ਹੋਰ ਮਕੈਨੀਕਲ ਨੁਕਸ ਕਿਸੇ ਹੋਰ ਮਸ਼ੀਨ ਵਾਂਗ ਹੀ ਦਿਖਾਈ ਦੇਣਗੇ। FFT ਵਿੱਚ ਨੁਕਸ ਦੀ ਪਛਾਣ ਕੀਤੀ ਜਾਵੇਗੀ, ਬਾਰੰਬਾਰਤਾ ਜਾਂ ਕੁਝ ਮਾਮਲਿਆਂ ਵਿੱਚ FFT ਦੇ ਪੈਟਰਨ ਦੇ ਆਧਾਰ ‘ਤੇ। ਇਹ ਬਾਰੰਬਾਰਤਾ ਕਿਸੇ ਵੀ ਚਾਰਟ ਜਾਂ ਟੇਬਲ ਤੋਂ ਪ੍ਰਾਪਤ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ।
ਇਲੈਕਟ੍ਰੀਕਲ ਹਸਤਾਖਰ ਵਿਸ਼ਲੇਸ਼ਣ (ESA):
ਇਲੈਕਟ੍ਰੀਕਲ ਦਸਤਖਤ ਵਿਸ਼ਲੇਸ਼ਣ ਮੋਟਰ ਕੰਟਰੋਲਰ ‘ਤੇ ਮੌਜੂਦਾ ਅਤੇ ਵੋਲਟੇਜ ਦੇ ਸਾਰੇ ਤਿੰਨ ਪੜਾਵਾਂ ਨੂੰ ਮਾਪਦਾ ਹੈ, ਜਦੋਂ ਮਸ਼ੀਨ ਕੰਮ ਕਰ ਰਹੀ ਹੈ। ਵੋਲਟੇਜ ਅਤੇ ਕਰੰਟ ਦੇ ਸਾਰੇ ਤਿੰਨ ਪੜਾਵਾਂ ਨੂੰ ਮਾਪ ਕੇ, ਹਰ ਵਾਰ ESA ਡੇਟਾ ਲਏ ਜਾਣ ‘ਤੇ ਮੋਟਰ ਨੂੰ ਸਪਲਾਈ ਕੀਤੀ ਜਾ ਰਹੀ ਪਾਵਰ ਦਾ ਪੂਰਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕੀਤਾ ਜਾਂਦਾ ਹੈ। ਇਸ ਤੋਂ ਇਲਾਵਾ, ਇੱਕ FFT ਵੋਲਟੇਜ ਅਤੇ ਮੌਜੂਦਾ ਵੇਵਫਾਰਮ ‘ਤੇ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
ਟੈਸਟਿੰਗ ਅਤੇ ਖੋਜ ਨੇ ਦਿਖਾਇਆ ਹੈ ਕਿ ਮੋਟਰ ਸਿਸਟਮ ਵਿੱਚ ਬਹੁਤ ਸਾਰੇ ਮਕੈਨੀਕਲ ਅਤੇ ਇਲੈਕਟ੍ਰੀਕਲ ਨੁਕਸ ਕਾਰਨ ਮੋਟਰ ਕਰੰਟ ਨੂੰ ਨੁਕਸ ਦੀ ਬਾਰੰਬਾਰਤਾ ‘ਤੇ ਮੋਡਿਊਲੇਟ ਕਰਨ ਦਾ ਕਾਰਨ ਬਣਦਾ ਹੈ।
ਪਾਵਰ ਵਿਸ਼ਲੇਸ਼ਣ:
ਪਾਵਰ ਵਿਸ਼ਲੇਸ਼ਣ ਨਾ ਸਿਰਫ਼ ਮੋਟਰ ਨਾਲ ਸਬੰਧਤ ਸਮੱਸਿਆਵਾਂ ਦੀ ਪਛਾਣ ਕਰੇਗਾ, ਬਲਕਿ ਕਿਸੇ ਵੀ ਆਉਣ ਵਾਲੇ ਪਾਵਰ ਮੁੱਦਿਆਂ ਜਿਵੇਂ ਕਿ ਬਹੁਤ ਜ਼ਿਆਦਾ ਹਾਰਮੋਨਿਕ ਸਮਗਰੀ, ਵੋਲਟੇਜ ਅਸੰਤੁਲਨ, ਵੋਲਟੇਜ ਬੇਮੇਲ, ਮੌਜੂਦਾ ਅਸੰਤੁਲਨ, ਮੋਟਰ ਸਿਸਟਮ ਦੇ ਪਾਵਰ ਫੈਕਟਰ ਅਤੇ ਮੋਟਰ ਸਿਸਟਮ ਦੀ ਕੁਸ਼ਲਤਾ ਦੀ ਪਛਾਣ ਕਰੇਗਾ। ਨਾਲ ਹੀ, ਕਿਉਂਕਿ ESA ਇੱਕੋ ਸਮੇਂ ਵੋਲਟੇਜ ਅਤੇ ਕਰੰਟ ਦੇ ਸਾਰੇ ਤਿੰਨ ਪੜਾਵਾਂ ਨੂੰ ਮਾਪਦਾ ਹੈ, ਇਹ ਮੋਟਰ ‘ਤੇ ਲੋਡ ਨੂੰ ਬਹੁਤ ਸਹੀ ਢੰਗ ਨਾਲ ਨਿਰਧਾਰਤ ਕਰ ਸਕਦਾ ਹੈ। ਇਹ ESA ਸੌਫਟਵੇਅਰ ਨੂੰ ਅਸਲ ਰੋਟਰ ਸਪੀਡ ਨੂੰ ਸਹੀ ਢੰਗ ਨਾਲ ਨਿਰਧਾਰਤ ਕਰਨ ਦੀ ਆਗਿਆ ਦਿੰਦਾ ਹੈ; ਆਮ ਤੌਰ ‘ਤੇ ਚੱਲਣ ਦੀ ਗਤੀ 1 RPM ਦੇ ਅੰਦਰ ਮਾਪੀ ਜਾਂਦੀ ਹੈ।
FFT ਵਿਸ਼ਲੇਸ਼ਣ:
ਮੌਜੂਦਾ ਦਾ ਐਫਐਫਟੀ ਐਮਵੀਏ ਜਾਂ ਹੋਰ ਦਸਤਖਤ ਵਿਸ਼ਲੇਸ਼ਣ ਤਕਨੀਕਾਂ ਦੇ ਸਮਾਨ ਮੋਟਰ ਪ੍ਰਣਾਲੀ ਵਿੱਚ ਨੁਕਸ ਦੀ ਪਛਾਣ ਕਰਦਾ ਹੈ। ਹਾਲਾਂਕਿ, ਮੋਟਰ ਵੋਲਟੇਜ ਅਤੇ ਮੌਜੂਦਾ ਵੇਵਫਾਰਮ ਦੋਵਾਂ ‘ਤੇ ਐਫਐਫਟੀ ਦਾ ਪ੍ਰਦਰਸ਼ਨ ਕਰਨਾ ਵਾਧੂ ਡਾਇਗਨੌਸਟਿਕ ਸਮਰੱਥਾ ਪ੍ਰਦਾਨ ਕਰਦਾ ਹੈ, ਜਦੋਂ ਐਮਵੀਏ ਅਤੇ ਮੋਟਰ ਕਰੰਟ ਸਿਗਨੇਚਰ ਐਨਾਲਿਸਿਸ (ਐਮਸੀਐਸਏ) ਦੀ ਤੁਲਨਾ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। MVA ਅਤੇ MCSA ਦੋਵੇਂ ਹੀ ਮੋਟਰ ਸਿਸਟਮ ਦੇ ਜਵਾਬ ਨੂੰ ਮਾਪਦੇ ਹਨ। ਜੇਕਰ ਮੌਜੂਦਾ ਸਪੈਕਟ੍ਰਮ ਜਾਂ ਵਾਈਬ੍ਰੇਸ਼ਨ ਸਪੈਕਟ੍ਰਮ ਵਿੱਚ ਵੱਡੀਆਂ ਸਪੈਕਟ੍ਰਲ ਚੋਟੀਆਂ ਹਨ, ਜੋ ਕਿ ਇਨਕਮਿੰਗ ਪਾਵਰ ਵਿੱਚ ਇੱਕ ਕੈਰੀਅਰ ਬਾਰੰਬਾਰਤਾ ਦਾ ਨਤੀਜਾ ਹੈ, ਤਾਂ ਇਹਨਾਂ ਵਿੱਚੋਂ ਕਿਸੇ ਵੀ ਤਕਨੀਕ ਨਾਲ ਇਹ ਖੋਜਿਆ ਨਹੀਂ ਜਾ ਸਕਦਾ ਹੈ। ਹਾਲਾਂਕਿ, ਵੋਲਟੇਜ ਅਤੇ ਕਰੰਟ ਦੋਵਾਂ ‘ਤੇ ਇੱਕ FFT ਕਰਨ ਨਾਲ, ਕੋਈ ਵੀ ਸਪੈਕਟ੍ਰਲ ਪੀਕ ਜੋ ਮੌਜੂਦ ਹਨ, ਆਉਣ ਵਾਲੀ ਸ਼ਕਤੀ ਤੋਂ ਆ ਰਹੀਆਂ ਹਨ। ਹਾਲਾਂਕਿ, ਜੇਕਰ ਮੌਜੂਦਾ ਸਪੈਕਟ੍ਰਮ ਵਿੱਚ ਮੌਜੂਦ ਵੋਲਟੇਜ ਸਪੈਕਟ੍ਰਮ ਵਿੱਚ ਕੋਈ ਸਪੈਕਟ੍ਰਲ ਪੀਕ ਨਹੀਂ ਹਨ ਤਾਂ ਨੁਕਸ ਜਾਂ ਤਾਂ ਮੋਟਰ ਜਾਂ ਸੰਚਾਲਿਤ ਮਸ਼ੀਨ ਤੋਂ ਆ ਰਿਹਾ ਹੈ।
ਸਟੇਟਰ ਨੁਕਸ:
ESA ਵਿੱਚ ਸਟੇਟਰ ਨੁਕਸ ਜਾਂ ਤਾਂ ਇਲੈਕਟ੍ਰੀਕਲ ਜਾਂ ਮਕੈਨੀਕਲ ਕੁਦਰਤ ਵਿੱਚ ਸ਼੍ਰੇਣੀਬੱਧ ਕੀਤੇ ਗਏ ਹਨ।
ਸਟੇਟਰ ਮਕੈਨੀਕਲ ਨੁਕਸ:
ਸਟੈਟਰ ਮਕੈਨੀਕਲ ਨੁਕਸ ਵਜੋਂ ਸ਼੍ਰੇਣੀਬੱਧ ਕੀਤੇ ਗਏ ਫਾਲਟ ਉਦੋਂ ਬਣਦੇ ਹਨ ਜਦੋਂ ਜਾਂ ਤਾਂ ਸਟੇਟਰ ਕੋਰ ਮੋਟਰ ਫਰੇਮ ਵਿੱਚ ਢਿੱਲੀ ਹੋ ਜਾਂਦੀ ਹੈ, ਜਾਂ ਜੇ ਸਟੈਟਰ ਸਲਾਟ ਵਿੱਚ ਵਿੰਡਿੰਗ ਢਿੱਲੀ ਹੁੰਦੀ ਹੈ। ਇਹਨਾਂ ਵਿੱਚੋਂ ਕੋਈ ਵੀ ਨੁਕਸ ਸਟੈਟਰ ਆਇਰਨ ਵਿੱਚ ਵਿਗਾੜਾਂ ਦੁਆਰਾ ਬਣਾਏ ਗਏ ਚੁੰਬਕੀ ਖੇਤਰ ਦਾ ਕਾਰਨ ਬਣੇਗਾ, ਵਿੰਡਿੰਗ ਨੂੰ ਮੋਡਿਊਲੇਟ ਕਰਨ ਲਈ ਰੱਖਿਆ ਗਿਆ ਹੈ। ਇਹਨਾਂ ਫ੍ਰੀਕੁਐਂਸੀਜ਼ ਨੂੰ ਸਟੇਟਰ ਸਲਾਟ ਪਾਸਿੰਗ ਫ੍ਰੀਕੁਐਂਸੀਜ਼ ਵਜੋਂ ਜਾਣਿਆ ਜਾਂਦਾ ਹੈ, ਜੋ ਸਟੈਟਰ ਸਲੋਟਾਂ ਦੀ ਸੰਖਿਆ ਨੂੰ ਚੱਲਦੀ ਗਤੀ ਦੁਆਰਾ ਗੁਣਾ ਕਰਕੇ ਨਿਰਧਾਰਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
ਹਾਲਾਂਕਿ ਤੁਰੰਤ ਵਿਨਾਸ਼ਕਾਰੀ ਨਹੀਂ ਹੈ, ਜੇਕਰ ਕਿਸੇ ਵੀ ਢਿੱਲੇਪਨ ਨੂੰ ਜਾਰੀ ਰੱਖਣ ਦੀ ਇਜਾਜ਼ਤ ਦਿੱਤੀ ਜਾਂਦੀ ਹੈ ਤਾਂ ਇਸ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਜਾਂ ਤਾਂ ਵਿੰਡਿੰਗ ਇਨਸੂਲੇਸ਼ਨ ਟੁੱਟ ਜਾਂਦੀ ਹੈ, (ਕਿਉਂਕਿ ਢਿੱਲੀ ਹੋਣ ਕਾਰਨ ਵਿੰਡਿੰਗ ਇਨਸੂਲੇਸ਼ਨ ਖਤਮ ਹੋ ਜਾਂਦੀ ਹੈ,) ਜਾਂ ਜ਼ਮੀਨੀ ਕੰਧ ਦੇ ਇਨਸੂਲੇਸ਼ਨ ਨੂੰ ਟੁੱਟਣ ਦਾ ਕਾਰਨ ਬਣਦਾ ਹੈ ਅਤੇ ਇੱਕ ਜ਼ਮੀਨੀ ਨੁਕਸ ਇਹਨਾਂ ਵਿੱਚੋਂ ਕੋਈ ਵੀ ਨੁਕਸ ਆਖਰਕਾਰ ਇੱਕ ਪੂਰੀ ਵਿੰਡਿੰਗ ਅਸਫਲਤਾ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਹੋਵੇਗਾ, ਸਭ ਤੋਂ ਵਧੀਆ ਸਥਿਤੀ ਮੋਟਰ ਰੀਵਾਇੰਡ ਜਾਂ ਮੋਟਰ ਦੇ ਪੂਰੀ ਤਰ੍ਹਾਂ ਤਬਾਹ ਹੋਣ ਵਿੱਚ ਹੈ। ਜੇ ਅਸਫਲਤਾ ਦੇ ਦੌਰਾਨ ਸਟੈਟਰ ਆਇਰਨ ਨੂੰ ਨੁਕਸਾਨ ਪਹੁੰਚਦਾ ਹੈ, ਤਾਂ ਇਸ ਅਸਫਲਤਾ ਲਈ ਕੁੱਲ ਮੋਟਰ ਬਦਲਣ ਦੀ ਲੋੜ ਹੋਵੇਗੀ। ਸਟੇਟਰ ਸਲਾਟ ਪਾਸ ਕਰਨ ਦੀ ਫ੍ਰੀਕੁਐਂਸੀ ਦਾ ਵਿਘਨ ਆਮ ਤੌਰ ‘ਤੇ ਇੰਨਾ ਮਾਮੂਲੀ ਹੁੰਦਾ ਹੈ ਕਿ MVA ਇਹਨਾਂ ਨੁਕਸਾਂ ਨੂੰ ਉਦੋਂ ਤੱਕ ਨਹੀਂ ਚੁੱਕਦਾ ਜਦੋਂ ਤੱਕ ਨੁਕਸ ਬਹੁਤ ਉੱਨਤ ਅਵਸਥਾ ਵਿੱਚ ਨਹੀਂ ਹੁੰਦਾ। ਇਹ ਨੁਕਸ ਢਿੱਲੇ ਹਿੱਸੇ, ਸਟੈਟਰ ਆਇਰਨ ਜਾਂ ਵਿੰਡਿੰਗ ਨੂੰ ਹਿਲਾਉਣ ਦਾ ਕਾਰਨ ਬਣਦੇ ਹਨ, ਕਿਉਂਕਿ ਚੁੰਬਕੀ ਖੇਤਰ ਸਟੈਟਰ ਦੇ ਦੁਆਲੇ ਘੁੰਮਦਾ ਹੈ, ਜੋ ਕਿ ਸਟੇਟਰ ਸਲਾਟ ਪਾਸ ਕਰਨ ਦੀ ਬਾਰੰਬਾਰਤਾ ਦੇ ਆਲੇ ਦੁਆਲੇ ਲਾਈਨ ਬਾਰੰਬਾਰਤਾ ਵਾਲੇ ਸਾਈਡਬੈਂਡ ਦੁਆਰਾ ਦਰਸਾਇਆ ਜਾਵੇਗਾ।
ਸਟੇਟਰ ਇਲੈਕਟ੍ਰੀਕਲ:
ਜੇਕਰ ਸਟੇਟਰ ਵਿੰਡਿੰਗਜ਼ ਅਤੇ ਗਰਾਊਂਡ ਵਿਚਕਾਰ ਇਨਸੂਲੇਸ਼ਨ ਟੁੱਟ ਜਾਂਦੀ ਹੈ, ਤਾਂ ਇੱਕ ਵਿੰਡਿੰਗ ਫਾਲਟ ਜਾਂ ਜ਼ਮੀਨੀ ਨੁਕਸ ਪੈਦਾ ਹੋਵੇਗਾ। ਇਹਨਾਂ ਨੁਕਸ ਦੇ ਨਤੀਜੇ ਵਜੋਂ ਲੋਕਲਾਈਜ਼ਡ ਹੀਟਿੰਗ ਅਤੇ ਹੋਰ ਇਨਸੂਲੇਸ਼ਨ ਡਿਗਰੇਡ ਹੋ ਜਾਂਦੀ ਹੈ ਜਦੋਂ ਤੱਕ ਵਿੰਡਿੰਗ ਆਖਰਕਾਰ ਵਿੰਡਿੰਗ ਨੂੰ ਸੜ ਕੇ ਪੂਰੀ ਤਰ੍ਹਾਂ ਨਸ਼ਟ ਨਹੀਂ ਕਰ ਦਿੰਦੀ ਅਤੇ ਗੰਭੀਰ ਮਾਮਲਿਆਂ ਵਿੱਚ ਅੰਦਰੂਨੀ ਲੈਮੀਨਰ ਇਨਸੂਲੇਸ਼ਨ ਨੂੰ ਵਿਗਾੜ ਜਾਂ ਸਾੜ ਦਿੰਦੀ ਹੈ।
ਜਦੋਂ ਇਹ ਨੁਕਸ ਵਾਪਰਦੇ ਹਨ, ਤਾਂ ਵਿੰਡਿੰਗ ਦੀਆਂ ਕਮਜ਼ੋਰੀਆਂ ਸਟੇਟਰ ਸਲਾਟ ਪਾਸ ਕਰਨ ਵਾਲੀ ਫ੍ਰੀਕੁਐਂਸੀ ਨੂੰ ਲਾਈਨ ਫ੍ਰੀਕੁਐਂਸੀ ‘ਤੇ ਮੋਡਿਊਲੇਟ ਕਰਨ ਦਾ ਕਾਰਨ ਬਣਦੀਆਂ ਹਨ, ਕਿਉਂਕਿ ਚੁੰਬਕੀ ਖੇਤਰ ਸਟੇਟਰ ਦੇ ਦੁਆਲੇ ਘੁੰਮਦਾ ਹੈ। ਇਹ ਸ਼ਾਫਟ ਦੇ ਮੋੜ ਦੇ ਤੌਰ ‘ਤੇ ਹੋਰ ਮੋਡਿਊਲੇਟ ਹੋਣਗੇ, ਜੋ ਲਾਈਨ ਫਰੀਕੁਐਂਸੀ ਸਾਈਡਬੈਂਡ ਦੇ ਦੁਆਲੇ ਚੱਲ ਰਹੇ ਸਪੀਡ ਸਾਈਡਬੈਂਡ ਬਣਾਏਗਾ।
ESA ਉਹਨਾਂ ਨੁਕਸਾਂ ਦੀ ਪਛਾਣ ਕਰ ਸਕਦਾ ਹੈ ਜਿਹਨਾਂ ਨੂੰ ਸਟੇਟਰ ਇਲੈਕਟ੍ਰੀਕਲ ਵਜੋਂ ਸ਼੍ਰੇਣੀਬੱਧ ਕੀਤਾ ਗਿਆ ਹੈ, ਪਰ ਨੁਕਸ ਦੀ ਕਿਸਮ ਦੀ ਪੁਸ਼ਟੀ ਕਰਨ ਲਈ, ਮੋਟਰ ਡੀ-ਐਨਰਜੀਡ ਨਾਲ ਮੋਟਰ ਸਰਕਟ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਨ ਦੀ ਸਿਫਾਰਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
ਸਟੇਟਰ ਸਲਾਟ ਪਾਸਿੰਗ ਫ੍ਰੀਕੁਐਂਸੀ ਵਿੱਚ ਦੁਬਾਰਾ ਇਹ ਮੋਡਿਊਲੇਸ਼ਨ ਬਹੁਤ ਮਾਮੂਲੀ ਹਨ ਅਤੇ ਬਣਾਏ ਗਏ ਬਲ ਬਹੁਤ ਛੋਟੇ ਹਨ ਅਤੇ ਆਮ ਤੌਰ ‘ਤੇ MVA ਨਾਲ ਖੋਜੇ ਨਹੀਂ ਜਾ ਸਕਦੇ ਹਨ।
ਰੋਟਰ ਨੁਕਸ:
ESA ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਹੋਏ ਖੋਜੇ ਗਏ ਆਮ ਰੋਟਰ ਨੁਕਸ ਹਨ ਸਟੈਟਿਕ ਇਕਸੈਂਟ੍ਰਿਕਿਟੀ (ਅਸਮਾਨ ਏਅਰ ਗੈਪਸ), ਡਾਇਨਾਮਿਕ ਐਕਸੈਂਟ੍ਰਿਸਿਟੀ (ਐਕਸੈਂਟ੍ਰਿਕ ਰੋਟਰ), ਅਤੇ ਟੁੱਟੀਆਂ ਰੋਟਰ ਬਾਰ।
ਸਥਿਰ ਅਕੇਂਦਰਤਾ:
ਜਦੋਂ ਰੋਟਰ ਕੋਰ ਕੇਂਦਰਿਤ ਹੁੰਦਾ ਹੈ ਅਤੇ ਚੁੰਬਕੀ ਖੇਤਰ ਵਿੱਚ ਕੇਂਦਰਿਤ ਹੁੰਦਾ ਹੈ, ਤਾਂ ਰੋਟਰ ਬਾਰਾਂ ਵਿੱਚੋਂ ਵਹਿਣ ਵਾਲਾ ਕਰੰਟ ਰੋਟਰ ਦੇ ਵਿਰੋਧੀ ਪਾਸਿਆਂ ਉੱਤੇ ਬਰਾਬਰ ਅਤੇ ਧਰੁਵੀ ਵਿਰੋਧੀ ਹੋਵੇਗਾ। ਪਰ, ਜੇਕਰ ਰੋਟਰ ਚੁੰਬਕੀ ਖੇਤਰ ਵਿੱਚ ਕੇਂਦਰਿਤ ਨਹੀਂ ਹੈ, ਤਾਂ ਰੋਟਰ ਬਾਰਾਂ ਵਿੱਚ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਤਾਕਤ ਜੋ ਕਿ ਸਟੇਟਰ ਦੇ ਸਭ ਤੋਂ ਨੇੜੇ ਹਨ, ਉਲਟ ਪਾਸੇ ਨਾਲੋਂ ਮਜ਼ਬੂਤ ਹੋਵੇਗੀ। ਇਸ ਤੋਂ ਇਲਾਵਾ, ਜਿਵੇਂ ਕਿ ਚੁੰਬਕੀ ਧਰੁਵ ਸਟੇਟਰ ਦੇ ਦੁਆਲੇ ਘੁੰਮਦੇ ਹਨ, ਇਹ ਰੋਟਰ ਬਾਰਾਂ ਦੇ ਆਲੇ ਦੁਆਲੇ ਚੁੰਬਕੀ ਖੇਤਰ ਨੂੰ ਹਰ ਵਾਰ ਮੋਡਿਊਲੇਟ ਕਰਨ ਦਾ ਕਾਰਨ ਬਣਦਾ ਹੈ ਜਦੋਂ ਇੱਕ ਧਰੁਵ ਤੰਗ ਕਲੀਅਰੈਂਸ ਨੂੰ ਪਾਸ ਕਰਦਾ ਹੈ। ਇਹ ਰੋਟਰ ਬਾਰ ਦੀ ਪਾਸਿੰਗ ਫ੍ਰੀਕੁਐਂਸੀ ਦੇ ਆਲੇ ਦੁਆਲੇ, ਲਾਈਨ ਫ੍ਰੀਕੁਐਂਸੀ ਸਪੈਕਟ੍ਰਲ ਪੀਕ ਤੋਂ ਦੋ ਗੁਣਾ ਬਣਾਏਗਾ। ਰੋਟਰ ਬਾਰ ਪਾਸ ਕਰਨ ਦੀ ਫ੍ਰੀਕੁਐਂਸੀ ਰੋਟਰ ਬਾਰਾਂ ਦੀ ਗਿਣਤੀ ਦੇ ਬਰਾਬਰ ਹੈ ਚੱਲਦੀ ਗਤੀ ਦੇ ਗੁਣਾ।
ਗਤੀਸ਼ੀਲ ਅਕੇਂਦਰਤਾ:
ਜੇਕਰ ਰੋਟਰ ਕੇਂਦਰਿਤ ਹੈ, ਪਰ ਰੋਟਰ ਕੋਰ ਵਿਸਤ੍ਰਿਤ ਹੈ, ਤਾਂ ਇਹ ਇੱਕ ਤੰਗ ਹਵਾ ਪਾੜਾ ਬਣਾਏਗਾ ਜੋ ਆਲੇ ਦੁਆਲੇ ਘੁੰਮਦਾ ਹੈ, ਰੋਟਰ ਦੇ ਨਾਲ ਹਵਾ ਦੇ ਅੰਤਰਾਲ ਦੇ ਅੰਦਰ। ਤੰਗ ਏਅਰ ਗੈਪ ਰੋਟਰ ਬਾਰ ਪਾਸ ਕਰਨ ਦੀ ਬਾਰੰਬਾਰਤਾ ਦੇ ਆਲੇ ਦੁਆਲੇ ਦੋ ਵਾਰ ਲਾਈਨ ਫ੍ਰੀਕੁਐਂਸੀ (2xLF) ਸਾਈਡਬੈਂਡ ਬਣਾਉਂਦਾ ਹੈ, ਪਰ ਕਿਉਂਕਿ ਤੰਗ ਕਲੀਅਰੈਂਸ ਏਅਰ ਗੈਪ ਵਿੱਚ ਘੁੰਮ ਰਹੀ ਹੈ, ਰੋਟਰ ਸਪੀਡ ‘ਤੇ, ਇਹ 2xLF ਸਾਈਡਬੈਂਡ ਨੂੰ ਰੋਟਰ ਸਪੀਡ ‘ਤੇ ਮੋਡਿਊਲੇਟ ਕਰਨ ਦਾ ਕਾਰਨ ਬਣੇਗਾ। ਇਹ 2xLF ਸਾਈਡਬੈਂਡ ਦੇ ਦੁਆਲੇ ਚੱਲ ਰਹੇ ਸਪੀਡ ਸਾਈਡਬੈਂਡ ਬਣਾਉਂਦਾ ਹੈ।
ਟੁੱਟੀਆਂ ਰੋਟਰ ਬਾਰ:
ਜਦੋਂ ਰੋਟਰ ‘ਤੇ ਡੈੱਡ ਸਪਾਟ ਚੁੰਬਕੀ ਖੇਤਰ ਦੇ ਹੇਠਾਂ ਲੰਘਦਾ ਹੈ ਤਾਂ ਸਟੇਟਰ ਦੇ ਚੁੰਬਕੀ ਖੇਤਰ ਅਤੇ ਰੋਟਰ ਵਿਚਕਾਰ ਕੋਈ ਪ੍ਰੇਰਣਾ ਨਹੀਂ ਹੋਵੇਗੀ। ਇਹ PPF ‘ਤੇ ਮੋਟਰ ਕਰੰਟ ਨੂੰ ਮੋਡਿਊਲੇਟ ਕਰਨ ਦਾ ਕਾਰਨ ਬਣੇਗਾ, ਇਹ ਮੌਜੂਦਾ ਸਪੈਕਟ੍ਰਮ ਵਿੱਚ ਲਾਈਨ ਫ੍ਰੀਕੁਐਂਸੀ ਦੇ ਦੁਆਲੇ PPF ਬਾਰੰਬਾਰਤਾ ਸਾਈਡਬੈਂਡ ਬਣਾਉਂਦਾ ਹੈ।
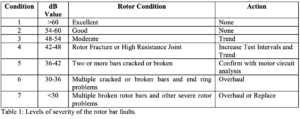
ਖੋਜ ਨੇ ਸਾਬਤ ਕੀਤਾ ਹੈ ਕਿ ਰੋਟਰ ਬਾਰ ਫਾਲਟ ਦੀ ਤੀਬਰਤਾ ਮੋਡੂਲੇਸ਼ਨ ਦੇ ਸਬੰਧਾਂ ‘ਤੇ ਅਧਾਰਤ ਹੈ; ਗੰਭੀਰਤਾ ਦੇ ਸੱਤ ਪੱਧਰਾਂ ਦੀ ਪਛਾਣ ਕੀਤੀ ਗਈ ਹੈ, ਸਾਰਣੀ 1 ਦੇਖੋ।
ਮਕੈਨੀਕਲ ਨੁਕਸ:
ਕੋਈ ਵੀ ਮਕੈਨੀਕਲ ਨੁਕਸ ਜੋ ਘੁੰਮਦੇ ਸਾਜ਼-ਸਾਮਾਨ ‘ਤੇ ਵਾਈਬ੍ਰੇਸ਼ਨ ਪੈਦਾ ਕਰਨਗੇ, ਮੋਟਰ ‘ਤੇ ਲੋਡ ਵਾਂਗ ਕੰਮ ਕਰਦੇ ਹਨ। ਇੱਥੋਂ ਤੱਕ ਕਿ ਇੱਕ ਬਹੁਤ ਹੀ ਛੋਟਾ ਪ੍ਰਭਾਵ ਜਵਾਬ, ਜਿਵੇਂ ਕਿ ਬੇਅਰਿੰਗ ਸਿਸਟਮ ਦੀ ਕੁਦਰਤੀ ਬਾਰੰਬਾਰਤਾ, ESA ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਆਸਾਨੀ ਨਾਲ ਖੋਜਿਆ ਜਾਂਦਾ ਹੈ। ESA ਸਪੈਕਟ੍ਰਮ ਵਿੱਚ ਮਕੈਨੀਕਲ ਨੁਕਸ ਲਾਈਨ ਫ੍ਰੀਕੁਐਂਸੀ ਸਾਈਡਬੈਂਡ ਦੀ ਸੈਂਟਰ ਫ੍ਰੀਕੁਐਂਸੀ ਦੇ ਰੂਪ ਵਿੱਚ ਦਿਖਾਈ ਦਿੰਦੇ ਹਨ।
ਡੈਮੋਡ ਸਪੈਕਟ੍ਰਮ:
ESA ਇੱਕ ਡੈਮੋਡ ਘੱਟ ਬਾਰੰਬਾਰਤਾ ਸਪੈਕਟ੍ਰਮ, Fmax 120 Hz ਵੀ ਤਿਆਰ ਕਰਦਾ ਹੈ। ਡੈਮੋਡ ਸਪੈਕਟ੍ਰਮ ਇੱਕ ਸਿਗਨਲ ਪ੍ਰੋਸੈਸਿੰਗ ਤਕਨੀਕ ਹੈ ਜੋ ਕੈਪਚਰ ਕੀਤੇ ਟਾਈਮ ਵੇਵਫਾਰਮ ਸਿਗਨਲ ਤੋਂ ਲਾਈਨ ਫ੍ਰੀਕੁਐਂਸੀ ਸਿਗਨਲ ਨੂੰ ਵੱਖ ਕਰਦੀ ਹੈ। ਪ੍ਰੋਸੈਸਡ ਸਿਗਨਲ ਵਿੱਚ ਜੋ ਵੀ ਬਚਿਆ ਹੈ ਉਹ ਫ੍ਰੀਕੁਐਂਸੀਜ਼ ਹਨ ਜੋ ਮੋਟਰ ਕਰੰਟ ਨੂੰ ਮੋਡੀਲੇਟ ਕਰਨ ਦਾ ਕਾਰਨ ਬਣ ਰਹੀਆਂ ਹਨ। ਇਸ ਪ੍ਰਕਿਰਿਆ ਦੇ ਸਿਗਨਲ ਦਾ FFT, ਨੁਕਸ ਦੀਆਂ ਸਾਰੀਆਂ ਬਾਰੰਬਾਰਤਾਵਾਂ ਨੂੰ ਬਹੁਤ ਸਪੱਸ਼ਟ ਤੌਰ ‘ਤੇ ਪ੍ਰਦਰਸ਼ਿਤ ਕਰਦਾ ਹੈ, ਜਿਵੇਂ ਕਿ ਰੋਟਰ ਤੋਂ ਆਉਣ ਵਾਲੇ ਨੁਕਸ, ਜਿਸ ਵਿੱਚ ਅਸੰਤੁਲਨ, ਗਲਤ ਅਲਾਈਨਮੈਂਟ, (ਸਿਰਫ ਮੋਟਰ ‘ਤੇ ਹੀ ਨਹੀਂ ਬਲਕਿ ਕਈ ਮਾਮਲਿਆਂ ਵਿੱਚ ਚਲਾਈ ਗਈ ਮਸ਼ੀਨ ‘ਤੇ ਵੀ)। PPF ਅਤੇ ਰਨਿੰਗ ਸਪੀਡ (RS) ਚੋਟੀਆਂ ਜੋ ਆਮ ਤੌਰ ‘ਤੇ ਸਧਾਰਣ ਮੌਜੂਦਾ ਸਪੈਕਟ੍ਰਮ ਵਿੱਚ ਲਾਈਨ ਫ੍ਰੀਕੁਐਂਸੀ ਦੇ ਦੁਆਲੇ ਸਾਈਡ ਬੈਂਡ ਦੇ ਰੂਪ ਵਿੱਚ ਦਿਖਾਈ ਦਿੰਦੀਆਂ ਹਨ, ਡੈਮੋਡ ਸਪੈਕਟ੍ਰਮ ਵਿੱਚ ਇੱਕ ਸਿੰਗਲ ਪੀਕ ਦੇ ਰੂਪ ਵਿੱਚ ਦਿਖਾਈ ਦਿੰਦੀਆਂ ਹਨ। ਇਹ ਸੌਫਟਵੇਅਰ ਨੂੰ ਮੋਟਰ ਸਿਸਟਮ ਦੇ ਅਸਲ RS ਨੂੰ ਸਹੀ ਢੰਗ ਨਾਲ ਨਿਰਧਾਰਤ ਕਰਨ ਵਿੱਚ ਮਦਦ ਕਰਦਾ ਹੈ ਜਦੋਂ ਡਾਟਾ ਲਿਆ ਗਿਆ ਸੀ, ਆਮ ਤੌਰ ‘ਤੇ 1 RPM ਸ਼ੁੱਧਤਾ ਦੇ ਅੰਦਰ। ਹੋਰ ਨੁਕਸ ਫ੍ਰੀਕੁਐਂਸੀ ਜੋ 120 Hz ਤੋਂ ਘੱਟ ਹਨ ਡੈਮੋਡ ਸਪੈਕਟ੍ਰਮ ਵਿੱਚ ਸਿੰਗਲ ਪੀਕ ਦੇ ਰੂਪ ਵਿੱਚ ਦਿਖਾਈ ਦੇਣਗੀਆਂ ਅਤੇ ਡੈਮੋਡ ਸਪੈਕਟ੍ਰਮ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਬੈਲਟ ਦੇ ਨੁਕਸ ਬਹੁਤ ਆਸਾਨੀ ਨਾਲ ਖੋਜੇ ਜਾਂਦੇ ਹਨ।
ਹੋਰ ਮਕੈਨੀਕਲ ਨੁਕਸ:
ਗੇਅਰ ਜਾਲ ਦੇ ਮੁੱਦੇ, ਵੈਨ ਪਾਸਿੰਗ ਅਤੇ ਕੋਈ ਹੋਰ ਮਕੈਨੀਕਲ ਫੋਰਸ ਜੋ ਕਿ ਮੋਟਰ ਸਿਸਟਮ ਵਿੱਚ ਕਿਤੇ ਵੀ ਮੌਜੂਦ ਹੈ, ਉੱਚ ਫ੍ਰੀਕੁਐਂਸੀ ਮੌਜੂਦਾ ਸਪੈਕਟ੍ਰਮ ਵਿੱਚ ਲਾਈਨ ਫ੍ਰੀਕੁਐਂਸੀ ਸਾਈਡ ਬੈਂਡਾਂ ਦੇ ਵਿਚਕਾਰ ਸੈਂਟਰ ਫ੍ਰੀਕੁਐਂਸੀ ਵਜੋਂ ਦਿਖਾਈ ਦੇਵੇਗੀ।
ਰੋਲਿੰਗ ਐਲੀਮੈਂਟ ਬੇਅਰਿੰਗ ਨੁਕਸ:
ਸ਼ੁਰੂਆਤੀ ਤੋਂ ਅਖੀਰਲੇ ਪੜਾਅ 2 ਦੇ ਬੇਅਰਿੰਗ ਨੁਕਸ ਉੱਚ ਫ੍ਰੀਕੁਐਂਸੀ ਦੇ ਮੌਜੂਦਾ ਸਪੈਕਟ੍ਰਮ ਵਿੱਚ ਬਹੁਤ ਸਪੱਸ਼ਟ ਤੌਰ ‘ਤੇ ਦਿਖਾਈ ਦਿੰਦੇ ਹਨ ਕਿਉਂਕਿ ਚੱਲਦੀ ਗਤੀ ਦੇ ਇੱਕ ਗੈਰ-ਪੂਰਨ ਅੰਕ ਮਲਟੀਪਲ ਦੇ ਆਲੇ ਦੁਆਲੇ ਲਾਈਨ ਫ੍ਰੀਕੁਐਂਸੀ ਸਾਈਡ ਬੈਂਡ ਹੁੰਦੇ ਹਨ।
ESA ਦਾ ਭਵਿੱਖ ਕੀ ਹੈ?
ਸ਼ੁਰੂਆਤੀ ਟੈਸਟਿੰਗ ਨੇ ਸੰਕੇਤ ਦਿੱਤਾ ਹੈ ਕਿ ESA ਸਕਰੀਨਿੰਗ ਮੋਟਰ ਨਾਲ ਚੱਲਣ ਵਾਲੀਆਂ ਮਸ਼ੀਨਾਂ ਲਈ ਉਪਲਬਧ ਸਭ ਤੋਂ ਸ਼ਕਤੀਸ਼ਾਲੀ ਸਾਧਨਾਂ ਵਿੱਚੋਂ ਇੱਕ ਹੈ। ਲਗਭਗ ਸਾਰੇ ਮਾਮਲਿਆਂ ਵਿੱਚ ਨੁਕਸ MVA ਦੇ ਮੁਕਾਬਲੇ ESA ਡੇਟਾ ਵਿੱਚ ਬਹੁਤ ਪਹਿਲਾਂ ਦਿਖਾਈ ਦਿੰਦੇ ਹਨ ਕਿਉਂਕਿ ਨੁਕਸ ਦਾ ਬਲ ਪੂਰੀ ਮਸ਼ੀਨਰੀ ਢਾਂਚੇ ਨੂੰ ਹਿਲਾਉਣ ਲਈ ਕਾਫੀ ਨਹੀਂ ਹੁੰਦਾ, ਜਿਵੇਂ ਕਿ ਮਕੈਨੀਕਲ ਵਾਈਬ੍ਰੇਸ਼ਨ ਹੁੰਦਾ ਹੈ। ਨਾਲ ਹੀ, ESA ਮੋਟਰ ਸਿਸਟਮ ਨੂੰ ਸਪਲਾਈ ਕੀਤੀ ਬਿਜਲੀ ਦੀ ਸਥਿਤੀ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰਨ ਦੇ ਨਾਲ-ਨਾਲ ਮੋਟਰ ਦੀ ਕੁਸ਼ਲਤਾ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰਨ ਦੇ ਸਮਰੱਥ ਹੈ, ਅਤੇ ਸਭ ਤੋਂ ਮਹੱਤਵਪੂਰਨ ਤੌਰ ‘ਤੇ ਡਾਟਾ ਲਏ ਜਾਣ ਵੇਲੇ ਮੋਟਰ ਦੀ ਸਹੀ ਚੱਲਣ ਦੀ ਗਤੀ। ESA ਅਤੇ MVA ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਸਮੇਂ ਇਹ ਮਾਪ ਮਹੱਤਵਪੂਰਨ ਹੁੰਦਾ ਹੈ, ਕਿਉਂਕਿ ਮੋਟਰ ਸਿਸਟਮ ਵਿੱਚ ਜ਼ਿਆਦਾਤਰ ਨੁਕਸ ਗਤੀ ‘ਤੇ ਨਿਰਭਰ ਹੁੰਦੇ ਹਨ ਅਤੇ ਸਹੀ ਸਪੈਕਟ੍ਰਮ ਵਿਸ਼ਲੇਸ਼ਣ ਲਈ ਚੱਲਣ ਦੀ ਗਤੀ ਦਾ ਸਹੀ ਨਿਰਧਾਰਨ ਮਹੱਤਵਪੂਰਨ ਹੁੰਦਾ ਹੈ।
ਬਾਰੰਬਾਰਤਾ ਜਵਾਬ:
ਕਿਉਂਕਿ ESA ਨੁਕਸ ਦੇ ਪਛਾਣਕਰਤਾ ਵਜੋਂ ਮੋਟਰ ਕਰੰਟ ਵਿੱਚ ਤਬਦੀਲੀਆਂ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ, ਇੱਥੋਂ ਤੱਕ ਕਿ ਬਹੁਤ ਘੱਟ ਅਤੇ ਬਹੁਤ ਜ਼ਿਆਦਾ ਫ੍ਰੀਕੁਐਂਸੀ ਨੁਕਸ ਵੀ ਖੋਜੇ ਜਾ ਸਕਦੇ ਹਨ। MVA ਦੀ ਮਾਪ ਦੀ ਕਿਸਮ (ਰਿਸ਼ਤੇਦਾਰ ਜਾਂ ਪੂਰਨ) ਅਤੇ ਸੈਂਸਰ ਦੀ ਬਾਰੰਬਾਰਤਾ ਪ੍ਰਤੀਕਿਰਿਆ ਦੇ ਅਧਾਰ ਤੇ ਸੀਮਾਵਾਂ ਹਨ।
ਡੂੰਘੇ ਖੂਹ ਵਰਟੀਕਲ ਪੰਪ:
ਲੰਬਕਾਰੀ ਪੰਪਾਂ ਦੇ ਤਜਰਬੇ ਨੇ ਦਿਖਾਇਆ ਹੈ ਕਿ ਪੰਪ ਵਿੱਚ ਨੁਕਸ ਮੋਟਰ ਵਿੱਚ ਪ੍ਰਸਾਰਿਤ ਨਹੀਂ ਹੁੰਦੇ ਹਨ। ਇਹ ਪਤਾ ਲਗਾਉਣ ਲਈ ਕਿ ਪੰਪ ਵਿੱਚ ਕੀ ਚੱਲ ਰਿਹਾ ਹੈ, ਪੰਪ ਉੱਤੇ ਹੀ ਟ੍ਰਾਂਸਡਿਊਸਰ ਲਗਾਉਣੇ ਜ਼ਰੂਰੀ ਹਨ। ਮੋਟਰ ‘ਤੇ ਪੰਪ ਦੇ ਨੁਕਸ ਉਦੋਂ ਤੱਕ ਨਹੀਂ ਲੱਭੇ ਜਾਂਦੇ ਜਦੋਂ ਤੱਕ ਪੰਪ ਆਮ ਤੌਰ ‘ਤੇ ਪੂਰੀ ਤਰ੍ਹਾਂ ਨਸ਼ਟ ਨਹੀਂ ਹੋ ਜਾਂਦਾ। ਸ਼ੁਰੂਆਤੀ ਟੈਸਟਿੰਗ ਨੇ ਦਿਖਾਇਆ ਹੈ ਕਿ ਪੰਪ ਵਿੱਚ ਛੋਟੀ ਮਾਤਰਾ ਵਿੱਚ ਕੈਵੀਟੇਸ਼ਨ ਅਤੇ ਇੱਥੋਂ ਤੱਕ ਕਿ ਵੈਨ ਪਾਸਿੰਗ ਫ੍ਰੀਕੁਐਂਸੀ ਨੂੰ ESA ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਆਸਾਨੀ ਨਾਲ ਖੋਜਿਆ ਜਾ ਸਕਦਾ ਹੈ। ਉਸੇ ਸਮੇਂ ਲਏ ਗਏ MVA ਸਪੈਕਟ੍ਰਮ ਨੇ ਕਿਸੇ ਵੀ ਨੁਕਸ ਦਾ ਕੋਈ ਸਬੂਤ ਨਹੀਂ ਦਿਖਾਇਆ।
ਵੇਰੀਏਬਲ ਫ੍ਰੀਕੁਐਂਸੀ ਡਰਾਈਵ:
VFDs ਦੁਆਰਾ ਚਲਾਏ ਜਾਣ ਵਾਲੇ ਮੋਟਰਾਂ ਦੀ ਜਾਂਚ ਕਰਨ ਲਈ ESA ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਸਮੇਂ, ਨਾ ਸਿਰਫ ਮੋਟਰ ਸਿਸਟਮ ਦੀਆਂ ਨੁਕਸਾਂ ਦਾ ਪਤਾ ਲਗਾਇਆ ਜਾ ਸਕਦਾ ਹੈ, ਬਲਕਿ ਡ੍ਰਾਈਵ ਵਿੱਚ ਬਿਰਧ ਕੈਪਸੀਟਰ ਅਤੇ ਹੋਰ ਇਲੈਕਟ੍ਰੀਕਲ ਸਮੱਸਿਆਵਾਂ ਬਹੁਤ ਆਸਾਨੀ ਨਾਲ ਸਪੱਸ਼ਟ ਹੁੰਦੀਆਂ ਹਨ।
ਇਲੈਕਟ੍ਰੀਕਲ ਹਸਤਾਖਰ ਵਿਸ਼ਲੇਸ਼ਣ ਜਾਂ ਆਪਣੇ ਪਲਾਂਟ ‘ਤੇ ਮੋਟਰ ਸਿਸਟਮ ਦੀ ਭਰੋਸੇਯੋਗਤਾ ਨੂੰ ਕਿਵੇਂ ਸੁਧਾਰਿਆ ਜਾਵੇ ਬਾਰੇ ਵਧੇਰੇ ਜਾਣਕਾਰੀ ਲਈ www.alltestpro.com ਜਾਂ ਈਮੇਲ [email protected] ‘ਤੇ ਜਾਓ।

AT34™
ਜ਼ਮੀਨੀ ਨੁਕਸ, ਅੰਦਰੂਨੀ ਵਾਈਡਿੰਗ ਨੁਕਸ, ਖੁੱਲ੍ਹੇ ਕੁਨੈਕਸ਼ਨ, ਅਤੇ ਗੰਦਗੀ ਲਈ ਮੋਟਰ ਕੰਪੋਨੈਂਟ ਦੀ ਇਕਸਾਰਤਾ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰੋ ਅਤੇ ਰੁਝਾਨ ਦਿਓ – ਸਭ ਕੁਝ ਇੱਕ ਹੱਥ ਨਾਲ ਫੜੇ ਗਏ ਉਪਕਰਣ ਨਾਲ।