تحليل التوقيع الكهربائي مقابل تحليل الاهتزاز
خلاصة:
من المعروف أن الآلات الدوارة تظهر خصائص محددة عندما تتسبب الأعطال في تحرك الخط المركزي الهندسي للعمود بشكل دوري. منذ أكثر من 70 عامًا، تم استخدام تحليل اهتزاز الآلات (MVA) لتحديد وتحديد مدى خطورة هذه الأعطال، وهو جزء لا يتجزأ من العديد من برامج موثوقية المصانع الناجحة. أثبتت التجارب والأبحاث الحديثة أنه يمكن تحديد العديد من هذه الأخطاء نفسها باستخدام تحليل التوقيع الكهربائي (ESA). تقوم وكالة الفضاء الأوروبية أيضًا بتقييم وتحديد الأعطال المتعلقة بالطاقة الواردة إلى المحطة، والطاقة المزودة للمحرك، بالإضافة إلى الأعطال الكهربائية والميكانيكية داخل نظام المحرك. علاوة على ذلك، تبرز تقنية ESA كتقنية مهمة جدًا ضمن بعض برامج الموثوقية الكهربائية. وتستخدمه بعض المصانع كأداة كشف رئيسية لتحديد المشاكل الكهربائية والميكانيكية في الآلات التي تعمل بمحركات كهربائية. ستفحص هذه الورقة كلاً من تقنيات برنامج الصيانة التنبؤية الديناميكية (PdM) وتحدد نقاط القوة والضعف في كل تقنية وتحاول تحديد المكان الذي تتلاءم فيه هاتان التقنيتان بشكل أفضل مع برنامج الموثوقية.
الكلمات المفتاحية: طيف الدمود؛ مرحلة الكشف؛ تحليل التوقيع الكهربائي. تحليل الاتحاد الفرنسي للتنس؛ اهتزاز الآلات؛ أخطاء نظام المحرك. الدوار الكهربائية. الكهرباء الساكنة.
فلسفات الصيانة:
الشركات التي لديها عدد كبير من المعدات الرأسمالية إما تقدم خدمة أو تنتج منتجًا باستخدام هذه المعدات ذات رأس المال المكثف. من أجل حماية هذا الجهاز والحفاظ عليه في حالة تشغيل جيدة، من الضروري إجراء الصيانة. ومع مرور الوقت، يستمر الضغط على الشركات لإنتاج منتجات ذات جودة أعلى وبتكلفة أقل، مع محاولة تحقيق أرباح أعلى. ويخضع مقدمو الخدمات أيضًا إلى تقديم خدمات أكثر موثوقية وبتكلفة أقل بكثير. وهذا يتطلب من قسم الصيانة ليس فقط صيانة هذه المعدات بشكل صحيح، ولكن القيام بذلك بتكلفة أقل.
وقد أدت هذه الضغوط إلى تطور ممارسات أو فلسفات الصيانة. كانت ممارسات الصيانة المبكرة تُعرف باسم “التشغيل حتى الفشل” (RTF)، ولكن ضغط الصناعة أدى إلى تطوير هذه الممارسات إلى الصيانة الدقيقة (أو الاستباقية).
قد يفسر استعراض موجز لفلسفات الصيانة وتكاليفها الحاجة إلى تطور هذه الممارسات. تم استخلاص تكاليف RTF والصيانة الوقائية والتنبؤية من مقال نشر في أواخر السبعينيات من مصفاة في جنوب الولايات المتحدة قامت بتتبع ونشر تكاليف الصيانة من خلال هذا التطور. تمت إضافة تكاليف Precision وتعديلها لتتناسب مع تكلفة المعيشة بناءً على نتائج العديد من المصانع التي نفذت Precision Maintenance في أوائل التسعينيات.
التشغيل حتى الفشل (17 – 18 دولارًا لكل حصان / سنة):
يتطلب هذا النهج القليل من المشاركة بخلاف تشغيل الجهاز وإيقاف تشغيله وتوريد المنتج. وبهذه الطريقة تستمر الآلات في العمل دون انقطاع. ومع ذلك، عندما يحدث الفشل، فإنه عادة ما يكون شديدًا جدًا ويؤدي إلى فشل المكون الأصلي بالإضافة إلى تلف المكونات الأخرى لذلك الجهاز، مثل الأجهزة المتصلة والأساس. غالبًا ما يؤدي هذا الضرر الإضافي إلى تلف المكونات، والتي عادة لا تتعطل، ونادرا ما توجد في قطع الغيار داخل المصنع.
يتطلب إصلاح هذه المكونات أو استبدالها تصنيعها داخل الشركة أو شرائها من الشركة المصنعة الأصلية بتكلفة إضافية وفترات زمنية طويلة، مما يؤدي إلى عمليات إيقاف تشغيل طويلة. لذلك، يؤدي RTF إلى الطريقة الأكثر تكلفة لصيانة معدات المصنع. وذلك دون النظر إلى تكاليف الإنتاج المفقودة. من الصعب جدًا التنبؤ بهذه التكاليف وقياسها، لكن التجربة أظهرت أن زيادة تكاليف الصيانة تؤدي عادةً إلى فترات توقف إضافية.
الصيانة الوقائية (11-12 دولار/حصان/ريال):
تعتمد فلسفة الصيانة هذه على افتراض أن المعدات الميكانيكية سوف تتآكل وتفشل بمرور الوقت. يقوم مصممو ومصنعو الآلات ببحث ودراسة أجهزتهم لتحديد متطلبات الصيانة الموصى بها وفترات الفحص لآلاتهم. يتم بعد ذلك إجراء عمليات الصيانة والفحص الموصى بها خلال هذه الفترات الزمنية المحددة مسبقًا.
ومع ذلك، في منتصف الثمانينيات، توصلت دراسة موثوقية كتبها نولان وهيب إلى أن الآلات لا تتعطل في الوقت المحدد. إنهم يفشلون إما في وقت مبكر جدًا أو بعد فوات الأوان. تواجه الآلات التي تفشل في وقت مبكر جدًا نفس المشكلات والتكاليف المرتبطة بصيانة “التشغيل حتى الفشل”، في حين أن الآلات التي تتعطل بعد فوات الأوان تؤدي إلى ساعات طويلة من الصيانة غير الضرورية واستبدال المكونات قبل الأوان. والأهم من ذلك، فقد حددت هذه الدراسة أن حوالي 11% فقط من حالات فشل الآلات كانت مرتبطة بالعمر و89% منها كانت ذات طبيعة عشوائية. وهذا يعني في الأساس أن الصيانة الوقائية فعالة في 11% من الأعطال، ولكنها غير فعالة في 89%. وأفادوا أيضًا أن 68% من حالات الفشل تحدث بعد وقت قصير من تركيب أو إصلاح الآلة، وغالبًا ما يشار إلى هذه الفترة بفترة الاختراق، وكلما كانت الآلة أكثر تعقيدًا، زادت احتمالية تعطل الآلة أثناء الاستراحة. في الفترة.
الصيانة التنبؤية (7-8 دولار/حصان/ريال):
تم تحقيق تخفيض إضافي في تكاليف الصيانة من خلال استخدام مراقبة الحالة. في أوائل الستينيات أدركت الشركات أنه عندما تبدأ المعدات الدوارة في الفشل، فإن ظروف تشغيلها تتغير. ومن خلال مراقبة ظروف التشغيل هذه بشكل روتيني، يوفر التحذير المتقدم لهذه التغييرات وقتًا كافيًا لإخراج الجهاز من التشغيل، قبل حدوث فشل كارثي.
وقد تصاعدت فلسفة الصيانة هذه منذ أوائل الثمانينات مع إدخال جامعي البيانات المعتمدين على المعالجات الدقيقة. يمكن قياس خصائص تشغيل الآلة مثل درجة الحرارة والضغط وحالة الزيت والاهتزاز والأداء وتحديد اتجاهها لتحديد التغييرات. وفي بعض الحالات، يمكن بمقارنة هذه القياسات بقيم محددة مسبقًا التعرف بسرعة على حالة الآلة دون الحاجة إلى تغيير الاتجاه. وأدى ذلك إلى القبول السريع وتنفيذ برامج الصيانة التنبؤية (PdM). تستخدم الصيانة التنبؤية قياسات مختلفة للماكينة لتحديد حالة الماكينة. هناك العديد من تقنيات PdM المختلفة، وتستخدم البرامج الأكثر نجاحًا تقنيات متعددة لتوفير أكبر قدر من المعلومات وبالتالي أعلى احتمال لتحديد جهاز به مشكلة في طور النمو.
العديد من برامج PdM مذنبة بـ “عمى الغابات” (عدم القدرة على رؤية الغابة من الأشجار). إنهم يقضون الكثير من الوقت في جمع البيانات، بحيث لا يكون لديهم الوقت لتحليلها أو يهملون الأجهزة “الأقل أهمية”.
تستخدم برامج PdM الأكثر نجاحًا الفحص الفعال. الهدف من مرحلة الكشف هو تحديد “الآلات السيئة”. بمجرد تحديد آلة سيئة، يمكن استخدام قياسات أو تقنيات إضافية لتحديد سبب تغير حالة الآلة، ومن ثم يتم اتخاذ الإجراءات التصحيحية المناسبة لإعادة الآلة إلى حالة جيدة. وقد أدى هذا التطور إلى إنشاء ثلاث مراحل لـ PdM. والمراحل الثلاث هي الكشف والتحليل والتصحيح. تضيف بعض البرامج مرحلة رابعة وهي التحقق، ولكن أعتقد أن التحقق هو جزء من مرحلة التصحيح.
بعض تقنيات PdM الأكثر شيوعًا هي تحليل اهتزاز الآلات (MVA)، والتصوير الحراري بالأشعة تحت الحمراء، والصوتيات الفائقة، وتحليل الزيت، وتحليل دوائر المحرك (MCA)، وتحليل التوقيع الكهربائي (ESA). السمة المشتركة بين تقنيات PdM الأكثر نجاحًا هي أنها سهلة الأداء وتوفر قياسات غير مدمرة وقابلة للتكرار.
مرحلة الكشف:
عادةً ما تكون هذه هي المرحلة الأكثر أهمية وأساس برنامج PdM بأكمله. تتضمن مرحلة الكشف مراقبة دورية لخصائص تشغيل المعدات المختارة. يتم توجيه هذه القيم وفحصها بحثًا عن أي تغيير. يجب أن تتم عملية جمع البيانات بسرعة وبعناية، بهدف مراقبة أكبر عدد ممكن من الأجهزة. عند اكتشاف تغيير، يتم بعد ذلك أخذ بيانات إضافية لأغراض التحليل، وذلك لتحديد سبب تغير حالة الجهاز.
في مرحلة الكشف، يكون الغرض كله هو تحديد الأجهزة التي تتعطل. وهذا يعني أنه يتم فحص أكبر عدد ممكن من الأجهزة في أقل فترة زمنية ممكنة. تقوم معظم برامج PdM بعد ذلك بعرض البيانات المجمعة وتحديد الأجهزة المشبوهة.
مرحلة التحليل:
تتضمن هذه المرحلة أخذ أنواع إضافية وربما مختلفة من البيانات عن مرحلة الكشف. تتطلب هذه البيانات الإضافية عادةً جمع بيانات إضافية. نظرًا لأن عددًا قليلاً فقط من الأجهزة، خلال مرحلة الكشف (في مكان ما بين 2% و3% في برنامج ناضج) تظهر أي تغيير مهم، فعادةً ما يكون من الأكثر فعالية من حيث الوقت أخذ البيانات اللازمة بسرعة لتحديد التغيير أثناء عملية الكشف، و ثم ارجع لإلقاء نظرة أكثر تفصيلاً بمجرد اكتشاف التغيير.
ومع ذلك، إذا كان موقع المصنع بعيدًا أو به قيود أخرى على الوصول، فسيكون هناك ما يبرر أخذ بيانات أكثر تفصيلاً أثناء مرحلة الكشف. تقرر العديد من المصانع والمواقع تثبيت أنظمة مراقبة لهذه التطبيقات بشكل دائم.
مرحلة التصحيح:
تتضمن هذه المرحلة تصحيح وإزالة المشكلة التي أدت إلى التغيير في الحالة. قد يتطلب ذلك تنظيف مروحة، أو استبدال المحمل أو الوصلة البالية، وما إلى ذلك. تحدد مستويات الاهتزاز المقبولة أو مستويات قياس الأداء الأخرى النوع الدقيق للتصحيحات والإصلاحات. توجد تفاصيل تصحيح هذه المشكلات وإزالتها في الأقسام اللاحقة من هذه المقالة.
عادةً ما تكون البيانات المأخوذة خلال مرحلة الكشف غير كافية لتقديم أي شيء آخر غير التحليل الأولي. لإجراء تحليل أكثر تفصيلاً، يجب أخذ أنواع أخرى والمزيد من البيانات المعنية. في بعض الحالات، قد يلزم تشغيل الجهاز في ظل ظروف مختلفة وبتقنيات متعددة. إن محاولة تحليل المشكلة باستخدام نتائج بيانات الكشف فقط هي أقل من التحليل الموثوق. إذا تم أخذ بيانات كافية أثناء مرحلة الكشف لإجراء تحليل أكثر دقة، فسيؤدي ذلك إلى إبطاء عملية الكشف. لقد أدركت معظم أقسام الموثوقية ذات الخبرة أهمية الفصل بين هاتين الخطوتين.
الموثوقية الكهربائية:
يعتقد معظم الناس فقط أن الموثوقية الكهربائية تنتهي بتوصيل الطاقة بنجاح إلى المحطة. تعتبر الطاقة الكهربائية من أهم المواد الخام المستخدمة في الصناعة اليوم. لا يجب أن يكون لدينا تدفق مستمر للطاقة فحسب، بل يجب أن تكون نظيفة ومتوازنة أيضًا. ومع ذلك، فإن هذه السلعة المهمة تعد أيضًا واحدة من المواد الخام الأقل فحصًا التي يتم توفيرها للمصنع.
الكهرباء مطلوبة في جميع مناطق المصنع تقريبًا لتوفير القوة الدافعة التي تشغل معظم المعدات التي تنتج المنتجات أو تقدم الخدمات التي بنيت معدات المصنع من أجل أدائها. تعتبر الكهرباء منتجًا فريدًا في حد ذاته، حيث أنها تتطلب تدفقًا مستمرًا، ولا يمكن تخزينها بشكل ملائم، وعادةً لا يتم فحصها قبل الاستخدام.
قد تكون جودة الطاقة هي سبب العطل أو الفشل. عادة ما تكون نتيجة ضعف “جودة الطاقة” طويلة المدى ولا تعتبر دائمًا مصدر المشكلة. يحترق المحرك أو يتعطل القاطع، ويتم إجراء فحوصات كهربائية وميكانيكية على المحرك والآلة المدفوعة، ثم يتم إعادة بناء المحرك أو استبداله وتكرر العملية بأكملها. بالإضافة إلى ذلك، أدت الآلات والمعدات الأحدث اليوم إلى زيادة الحاجة إلى زيادة جودة الطاقة الأفضل. ومع ذلك، إذا تم فحص الطاقة على الإطلاق، فقد يتم فحصها عند النقطة التي تدخل فيها إلى المصنع وليس على أي أساس روتيني. كما لا يتم فحصها عند تزويدها بالمحرك أو الجهاز نفسه.
يتم توليد الطاقة عادة بعيداً عن نقطة الاستخدام، وموثوقية التوليد الأصلي غير معروفة بالإضافة إلى أنه يتم دمجها على الشبكة مع العديد من المولدات الأخرى. يتم نقل الطاقة من خلال عدة محولات مختلفة، والعديد من الأميال من الكابلات العلوية والأرضية قبل وصولها إلى المحطة. العديد من أنظمة التوزيع الكهربائية هذه مملوكة ومدارة وصيانتها من قبل عدة كيانات مختلفة. بمجرد وضع طاقة سيئة أو “رديئة الجودة” على الشبكة، لا يمكن للمستخدم إزالتها أو حتى رفضها.
العديد من محطات التوليد أصغر حجمًا ومملوكة للقطاع الخاص. يجري العمل لمحاولة تنظيم وتوحيد جودة الطاقة والعديد من الولايات لديها معاييرها ولوائحها المتخصصة الخاصة بها. ومع ذلك، فإن الطاقة المولدة لا تتوقف بالضرورة عند حدود الدولة التي يتم توليدها فيها.
وحتى لو وصلت الطاقة إلى المحطة “بنوعية جيدة”، فهناك العديد من المناطق داخل النظام الحركي التي يمكن أن تؤثر سلبًا على استمرار نجاح تشغيل المحطة.
نظام المحرك الكهربائي:
أكثر من المحرك نفسه يمكن أن يؤثر على موثوقية المصنع. في الواقع أي شيء داخل النظام الحركي يمكن أن يسبب فشل النظام الحركي، مما قد يؤدي إلى تعطيل العملية. سيؤدي الاكتشاف الفعال إلى فحص الجهاز بحثًا عن المشكلات المحتملة. ومن المنطقي أن تقوم طريقة الكشف بفحص أكبر قدر ممكن من النظام الحركي بأقل عدد ممكن من القياسات. تُستخدم طريقة الكشف أيضًا لتحديد أكبر عدد ممكن من حالات الفشل المحتملة. عند اختيار طريقة فحص فعالة، من الضروري أيضًا تحديد المشكلات التي تؤدي إلى حدوث أعطال في النظام الحركي. بمجرد الإجابة على هذه الأسئلة، فمن الضروري تحديد الطرق الممكنة المتاحة لفحص أكبر عدد من الأجهزة في أقل قدر من الوقت.
يتكون النظام الحركي من نظامين فرعيين: النظام الفرعي للمحرك/القيادة والنظام الفرعي الميكانيكي. يبدأ النظام الفرعي للمحرك/القيادة مع وصول الطاقة إلى المحطة، وقد يشمل ذلك المحولات والكابلات وأجهزة التبديل. يتم بعد ذلك توفير الطاقة الواردة إلى مركز التوزيع أو التحكم في المحركات (MCC). يتكون مركز التحكم في المحرك (MCC) من بادئات التشغيل وأجهزة الحماية، مثل الأحمال الزائدة ومحركات التردد المتغير ومجموعة متنوعة من الأنظمة الأخرى التي تنقل الطاقة بأمان إلى المحرك ليتم تشغيله والتحكم فيه بنجاح.
يقوم المحرك الكهربائي بتحويل الطاقة الكهربائية إلى عزم دوران ميكانيكي؛ لذلك، يحتوي المحرك على مكونات كهربائية ومكونات ميكانيكية. يتكون الجزء الكهربائي للمحرك من المكون الثابت أو الجزء الثابت، والمكون الدوار أو العضو الدوار.
توفر ملفات الجزء الثابت مسارًا لتدفق التيار، مما يؤدي إلى إنشاء مجال مغناطيسي في الجزء الثابت. يتكون الجزء الدوار من ملفات أو قضبان لتوفير مسار لتدفق التيار عبر الجزء الدوار، وبالتالي إنشاء مجال مغناطيسي للدوار. التفاعل بين المجال المغناطيسي للجزء الدوار والمجال المغناطيسي للجزء الثابت يخلق عزم الدوران الميكانيكي. يبدأ النظام الفرعي الميكانيكي بالجزء الميكانيكي للمحرك. يبدأ ذلك بالعمود، الذي ينقل عزم الدوران الناتج عن تفاعل المجالات المغناطيسية للعضو الدوار والجزء الثابت إلى الآلة المدفوعة أو الحمل. تقوم المحامل بفصل المكونات الدوارة عن المكونات غير الدوارة، بالإضافة إلى وضع الدوار داخل المحرك. يتم توصيل عمود المحرك بالحمل باستخدام أداة اقتران مثل الوصلات المباشرة والأحزمة والبكرات أو حتى التروس في بعض الأحيان.
الآلة المدفوعة هي جزء النظام الذي يقوم بالعمل وهناك أنواع عديدة من الآلات التي تقوم بدور الحمل، مثل المضخات، المراوح، الضواغط، أدوات الآلة، الروبوتات، سيقان الصمامات وغيرها الكثير من الأجهزة الميكانيكية. الجزء الأخير من نظام الآلة هو العملية نفسها، قد تقوم الآلة بتشكيل المواد أو قطعها، أو زيادة الضغط، أو تحريك الهواء أو أنواع أخرى من الغازات، أو نقل السوائل أو خلط المواد. عند اختيار طريقة الكشف، من الضروري مسح أكبر عدد ممكن من مكونات النظام.
النظام الفرعي للمحرك/المحرك:
أنواع الأخطاء التي ستحدث في النظام الفرعي للمحرك/القيادة هي في الغالب كهربائية بطبيعتها.
تتراوح أعطال الطاقة الواردة من عدم تطابق الجهد، وعدم الجيبية، وعدم توازن الجهد. يمكن أن تأتي هذه مباشرة من المورد، أو حدوث قصور في ملفات المحولات أو إعدادات الصنبور غير المناسبة على المحولات. يمكن للطاقة غير الجيبية إنشاء توافقيات تسلسلية سلبية داخل المحرك، مما يؤدي إلى توليد حرارة زائدة.
يمكن أن تتراوح الأخطاء في نظام التحكم من التوصيلات السائبة لقضبان الناقل أو الكابلات، أو الموصلات المتآكلة أو المتآكلة أو السائبة، أو توصيلات الصمامات السائبة، أو مرحلات التحميل الزائد الخاطئة. تؤدي التوصيلات السائبة والموصلات المتآكلة أو المحفورة إلى حدوث عدم توازن في الجهد، حيث يمكن أن يؤدي عدم توازن الجهد الصغير المطبق على المحرك إلى حدوث عدم توازن تيار أكبر بما يصل إلى عشرين مرة، مما يؤدي إلى إنشاء تيارات متداولة تخلق حرارة زائدة في نظام المحرك.
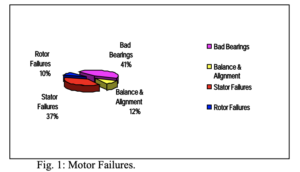
يمكن تقسيم الأخطاء في نظام المحرك إلى أخطاء كهربائية وميكانيكية. في منتصف الثمانينات، أفاد معهد أبحاث الطاقة الكهربائية أن 53% من أعطال المحركات كانت ميكانيكية بطبيعتها (41% محامل، 12% توازن ومحاذاة) و47% كهربائية (37% لف و10% دوار)، انظر الشكل. 1. من بين أخطاء اللف 83٪ عبارة عن شورتات متعرجة و 17٪ فقط عبارة عن عزل للعيوب الأرضية. سوف تختلف أخطاء الدوار باختلاف نوع المحرك والبناء. ومع ذلك، فإن المحرك الأكثر شيوعًا هو المحرك الحثي ذو الجزء الدوار ذو القفص السنجابي. الأخطاء الشائعة في الدوارات ذات القفص السنجابي هي قضبان الدوار المفكوكة أو المكسورة، أو الدوار غير متحد المركز، أو الدوار الحساس للحرارة.
النظام الفرعي الميكانيكي:
الأعطال الميكانيكية داخل المحرك هي في الأساس نفس الأعطال الموجودة في أي معدات دوارة أخرى. يمكن أن تشمل هذه الأخطاء عدم التوازن، وعدم المحاذاة، والعمود المنحني، والمكونات السائبة، والمحامل البالية أو المعيبة. تتعرض المحركات أيضًا للفشل نتيجة لتشويه المجال المغناطيسي للجزء الثابت أو الدوار. تخلق هذه العيوب قوى ميكانيكية تتفاعل مع قوى ميكانيكية أخرى مثل عدم التوازن، واختلال المحاذاة، وما إلى ذلك.
داخل المحرك، يتم استخدام المحامل لوضع الدوار وفصل المكون الدوار عن المكون الثابت. عادة ما يتم استخدام نوعين من المحامل، محامل العناصر المتداول ومحامل الأكمام أو المجلة.
تعتمد أخطاء الاقتران على نوع أجهزة الاقتران. هناك العديد من الأجهزة المختلفة المتاحة لتوصيل المحرك بالحمل. تقوم بعض الأجهزة بتوصيل المحرك مباشرة بالآلة المشغلة وتعمل هذه الآلات بنفس السرعة وفي نفس الاتجاه. بعض الأجهزة تغير سرعتها أو اتجاهها أو كليهما. أجهزة التوصيل الشائعة الأخرى هي الأحزمة والبكرات والتروس.
يمكن أن يكون لأي من أنواع أدوات التوصيل عدم توازن، أو نفاذ، أو معالجة غير مربعة أو أخطاء أخرى في التركيب أو التجميع على المكونات الدوارة.
يمكن أن تؤدي ترتيبات الحزام والبكرة إلى حدوث أخطاء بسبب عدم تثبيت البكرة بشكل صحيح على العمود، أو قد تنفد البكرة، أو قد يصبح الحزام مفككًا أو متشققًا أو متآكلًا. إذا كان جهاز التوصيل عبارة عن ترتيب تروس، فعادةً ما توجد قوى صغيرة نتيجة لتشابك أسنان أحد التروس مع الترس الآخر. تحدث أخطاء إضافية في حالة نفاد أحد التروس أو الآخر. تتعرض التروس أيضًا للتآكل أو التشقق أو الكسر في الأسنان.
قد تحتوي الآلة أو الحمولة المدفوعة أيضًا على مستويات مختلفة من عدم التوازن أو سوء المحاذاة أو النفاد مما قد يؤدي إلى إنشاء قوى دوارة. تعمل آلات الطرد المركزي مثل مروحة المضخة وحتى الضواغط على إنشاء قوى هيدروليكية تتفاعل بين الأجزاء الدوارة وغير الدوارة في الماكينة. تتسبب هذه القوى في الحركة في كل مرة تمر فيها إحدى ريش أو شفرات الدفاعة بمكون ثابت، مثل “قطع الماء” في المضخة.
يمكن للعملية نفسها أن تخلق قوى ميكانيكية تعمل على نظام الآلة/المحرك. بعض هذه القوى هي نتيجة تشغيل الآلة. تقوم الآلات، مثل آلات الضغط وآلات الختم، بإنشاء قوى أثناء التشغيل العادي. يمكن للعمليات، مثل التجويف وإعادة التدوير، أن تخلق قوى هيدروليكية في نظام الموائع. يمكن أن تؤدي التغييرات الإضافية في العملية، مثل التغيير في الحمل، إلى تغيير درجات حرارة وضغوط تشغيل الماكينة، مما يتسبب في حدوث تغييرات في المحاذاة نتيجة للنمو الحراري التفاضلي للآلات المعنية.
اهتزاز الآلات:
تستخدم قياسات اهتزاز الآلات محولات الطاقة لقياس الحركة الميكانيكية للمكون أو جزء الماكينة الذي يهتز. تقوم محولات الطاقة بتحويل هذه الحركة الميكانيكية إلى إشارة كهربائية. يتم تركيب محول الطاقة مباشرة على المكون الذي يتحرك، أو يتم تركيبه على المحمل أو أي هيكل دعم آخر. تقوم هذه المستشعرات بقياس الحركة الميكانيكية للمكونات التي يتم ملاحظتها، والتي تكون إما غلاف المحمل أو العمود نفسه.
عندما تتحرك حركة المكون نحو المستشعر؛ فهو يولد خرج جهد إيجابي، عندما يتحرك المكون بعيدًا عن المستشعر؛ فهو يولد خرج الجهد السلبي. يسمح ذلك للمستشعر بإنتاج إشارة كهربائية للخرج من شأنها تكرار حركة المكون المتحرك. مقدار الجهد يمثل مقدار الحركة.
ينص قانون نيوتن الثاني للحركة على أن F=ma. وهذا يترجم إلى حقيقة أن مقدار الحركة يمثل مقدار القوة المطبقة على المكون. ما يعنيه هذا، هو أنه في الآلات الكبيرة جدًا، سيستغرق الأمر خطأً كبيرًا جدًا لتحريك الكتلة بمقدار قابل للقياس. بالإضافة إلى ذلك، يمكن أن يؤثر مستشعر النوع المستخدم لإجراء القياس على إخراج المستشعر.
قياسات الاهتزاز:
هناك نوعان من قياسات الاهتزاز: الحركة النسبية والمطلقة.
الحركة النسبية:
الأول هو القياس النسبي، الذي يربط حركة المكون المقاس بمكون آخر. أكثر هذه القياسات شيوعًا هو قياس حركة العمود داخل محمل المجلة. يستخدم هذا القياس عمومًا مجسات دوامية غير متصلة، وهو جهاز استشعار يتم تركيبه إما على المحمل نفسه أو من خلاله. لقد أثبتت هذه القياسات فعاليتها الكبيرة في تحديد المسار الذي يتحرك فيه العمود داخل المحمل ومقدار الحركة. تكون هذه القياسات في حالة إزاحة، إما مل (0.001 بوصة) أو ميكرون (.000001 م).
الميزة الرئيسية لهذه الأنواع من أجهزة الاستشعار هي أنه من السهل جدًا مقارنة الحركة المقاسة ومقارنتها بخلوص المحمل الداخلي. العيب هو أنه إذا كان المكون الذي تم تركيب المستشعر عليه يتحرك، فلا يمكن تحديد القياس الحقيقي للقوى المطبقة على العمود. العيب الثاني هو أن الإزاحة عند الترددات الأعلى يمكن أن تكون صغيرة جدًا، ومع ذلك تكون لها إزاحة كبيرة. ونتيجة لذلك، سيتم دفن الأخطاء عند الترددات الأعلى في أرضية الضوضاء للإشارة المقاسة.
الحركة المطلقة:
القياس الثاني للاهتزاز هو الحركة المطلقة. يستخدم هذا القياس جهاز استشعار يقارن حركته بالأرض. أجهزة الاستشعار الأكثر شيوعًا هي أجهزة الاستشعار من النوع التحريضي التي تنتج جهد خرج يتناسب مع سرعة الحركة. المستشعر الأكثر استخدامًا هو جهاز كهرضغطية ينتج شحنات كهربائية مرتبطة بالقوة المطبقة.
أجهزة الاستشعار من النوع التحريضي وأجهزة الاستشعار الكهرضغطية لها مزايا وعيوب. العيب الرئيسي لكلاهما هو أنه نظرًا لأنهما يقيسان الحركة المطلقة، مثل المراحل المبكرة من عيوب محمل العناصر المتداول، فإن التجويف داخل تجويف المضخة أو القوى الهيدروليكية في مضخات الآبار العميقة ليست كافية لتحريك القاعدة أو مبيت المحمل.
العيب الثاني هو استجابة التردد لأجهزة الاستشعار. تكون أجهزة الاستشعار الحثية محدودة للغاية عند كل من الترددات المنخفضة والترددات العالية، في حين أن جهاز الاستشعار الكهرضغطي سوف يقوم بتضخيم الإشارات عند الترددات الأعلى. كلاهما يخضع أيضًا لتغيرات خطية بسبب تقنيات تركيب المستشعر، بالإضافة إلى اتجاه المستشعر أو موقعه.
القوى التي تقيسها هذه المستشعرات هي مزيج من جميع القوى الميكانيكية مجتمعة عند نقطة القياس. نظرًا لأن معظم الآلات الدوارة تحتوي على العديد من المكونات المختلفة وكل مكون من هذه المكونات يمكن أن يساهم بأي عدد من القوى المتكررة في الآلة، فإن إشارة الاهتزاز المقاسة ستكون إشارة معقدة تتكون من العديد من الإشارات.
تحليل اهتزاز الآلات (MVA):
تحدد عملية تحليل اهتزازات الآلات الترددات الموجودة في اهتزازات الآلات ومن ثم ربطها بترددات القوى التي تنشأ عن الأعطال الميكانيكية والكهربائية.
لتحديد الترددات الموجودة في الإشارة المقاسة، يقوم المحلل بإجراء تحويل فورييه سريع (FFT) على الإشارة. تقوم هذه العملية الرياضية بتحويل الإشارة الزمنية المعقدة المجمعة من المجال الزمني إلى مجال التردد. يحدد تحويل فورييه السريع السعات والترددات التي يتم دمجها معًا لتكوين هذه الإشارة المعقدة.
الأعطال الميكانيكية:
هناك العديد من الرسوم البيانية والجداول والأوراق التي تصف الترددات التي يولدها كل من هذه العيوب الميكانيكية، عند وجود هذه العيوب. العديد من هذه الأخطاء تولد نفس ترددات الخطأ. يتم إنشاء أخطاء مثل عدم التوازن، وعدم المحاذاة، والعمود المنحني، والعمود المتصدع، والدوار اللامركزي عن طريق أخطاء في الدوار وسوف تولد قوى مرتبطة بسرعة دوران العمود. في كثير من الحالات، يكون من الضروري إجراء قياسات إضافية أو استخدام تقنيات إضافية لتحديد هذه المشكلات المشابهة بشكل أكبر.
المشاكل الأخرى مثل عيوب محامل العناصر المتداول لها ترددات تعتمد على مرحلة الخلل بالإضافة إلى هندسة المحمل. إحدى المشاكل المتعلقة بعيوب محامل العناصر المتداول هي أن العيوب في المراحل المبكرة تولد إشارات ذات سعة منخفضة جدًا ويصعب تحديدها في المراحل المبكرة من خطأ متطور.
الأعطال الكهربائية:
تعمل المحركات الكهربائية من خلال تفاعل المجالات المغناطيسية على الجزء الدوار والجزء الثابت. إذا أصبح المجال المغناطيسي على الجزء الثابت أو الدوار غير متوازن أو مشوه، فإنه سيخلق قوى كهربائية غير متوازنة داخل المحرك. ستؤدي هذه القوى إلى تحرك الدوار داخل المحرك حيث يمر المجال المغناطيسي الدوار بالمجالات المشوهة أو غير المتوازنة.
الأعطال الكهربائية الثابتة:
يتم تحديد شكل النواة بواسطة المجال المغناطيسي. عادةً ما يتم تصميم كل من قلب الجزء الثابت والدوار ليكونا مستديرين تمامًا.
فجوات هوائية غير متساوية:
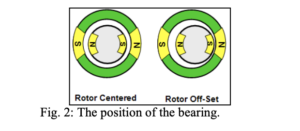
عند توسيط الجزء المتحرك المستدير تمامًا داخل الجزء الثابت المستدير تمامًا، ستكون جميع القوى المغناطيسية متساوية ومتعاكسة. ومع ذلك، إذا تم وضع الجزء المتحرك بالقرب من الجزء الثابت في أي منطقة، فعند مرور المجال المغناطيسي بالخلوص الضيق سيكون هناك جاذبية أقوى، مما يسحب الجزء المتحرك نحو الجزء الثابت وجاذبية أضعف على الجانب الآخر من الجزء المتحرك، حيث يوجد تصريح أوسع. سيؤدي ذلك إلى حدوث خلل في التوازن الكهربائي ويعرف باسم فجوة الهواء غير المتكافئة.
يتم تحديد موضع العضو الدوار داخل الجزء الثابت من خلال موضع المحامل (انظر الشكل 2). يتم وضع المحمل من خلال التركيبات الآلية لغطاء المحمل والجرس النهائي وإطار الماكينة. نظرًا لأن الخلوصات الضيقة يتم تحديدها من خلال موضع الدوار، فإن الخلوصات غير المتساوية ستكون دائمًا في نفس الموقع داخل فجوة الهواء ويشار إليها عادة باسم الانحراف الثابت.
لقد تقرر أنه في محرك ثنائي القطب بقدرة 2000 حصان، حيث يتم تعويض فجوة هواء الدوار بنسبة 10% داخل الجزء الثابت، ستكون القوى الكهربائية الناتجة أكبر بأكثر من 10 مرات من قوة الطرد المركزي المتولدة إذا كان العضو الدوار متوازنًا مواصفات توازن ISO تبلغ G 2.5. تعتبر مواصفات التوازن G2.5 توازنًا جيدًا.
ترتبط القدم الناعمة عادةً باختلال المحاذاة، ومع ذلك، إذا كان المحرك مزودًا بقدم ناعمة غير مصححة، فإن ربط مسامير التثبيت لن يؤدي فقط إلى تغيير موضع المحمل، مما يؤدي إلى اختلال محتمل، ولكنه سيؤدي أيضًا إلى تشويه غلاف المحرك (انظر الشكل 3) ).
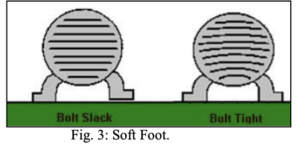
سيؤدي هذا الغلاف المشوه إلى تشويه الحديد الثابت، مما يؤدي بعد ذلك إلى تغيير المجال المغناطيسي للجزء الثابت وإنشاء حالة مشابهة لفجوات الهواء غير المتساوية.
لف فضفاض/الحديد الثابت:
إذا كان حديد الجزء الثابت مفككًا في إطار المحرك، أو كانت اللفات مفككة في فتحات الجزء الثابت، فإن المجال المغناطيسي الدوار من الجزء الثابت سوف يتسبب في تحرك المكون السائب في كل مرة يمر فيها أحد المجالات المغناطيسية فوق المكون السائب. عادةً ما تكون هذه الأخطاء الثلاثة هي سبب مشاكل الاهتزاز التي تصنف على أنها كهربائية ثابتة. تحدث جميع ترددات هذه الأخطاء عند تردد خط ضرب. في وحدة التحكم بالمحرك المباشر، سيكون هذا 7200 CPM لتطبيقات 60 هرتز و6000 CPM لتطبيقات 50 هرتز.
الأعطال الكهربائية الدوارة:
المحرك الصناعي الأكثر شيوعًا هو الدوار التعريفي ذو القفص السنجابي AC. تستخدم هذه الدوارات قضبان الدوار كموصلات لإنشاء المجال المغناطيسي على الدوار. يتم تحديد شكل الحديد أو القلب الدوار بواسطة المجال المغناطيسي.
الدوار غريب الأطوار:
إذا كان الحديد الأساسي للدوار أو الحلقات الطرفية غير مركزية، فسيؤدي ذلك إلى تشويه المجال المغناطيسي للدوار وسيأخذ شكل القلب. عندما يتم وضع الجزء المتحرك اللامركزي داخل الجزء الثابت متحد المركز، سيؤدي ذلك إلى خلق خلوصات غير متساوية بين المجال المغناطيسي للجزء الثابت والمجال المغناطيسي للجزء الثابت. ومع ذلك، نظرًا لوجود المجال المغناطيسي المشوه على الدوار، فإن الخلوص الضيق سوف يدور مع العمود. عندما يتم وضع الخلوص الضيق تحت القطب المغناطيسي، سيتم إنشاء عدم توازن كهربائي. نظرًا لأن عدم التوازن الكهربائي يتغير مع موضع الجزء الدوار، غالبًا ما يُشار إلى هذا الخطأ باسم الانحراف الديناميكي.
قضبان الدوار المكسورة:
الغرض من قضبان الجزء الدوار الموجودة على الجزء الدوار ذو القفص السنجابي هو توفير مسار لتدفق التيار من أحد طرفي الجزء الدوار إلى الطرف الآخر. سيخلق التدفق الحالي مجالًا مغناطيسيًا على الدوار. عندما يتدفق التيار في اتجاه واحد فإنه سيخلق مجالًا مغناطيسيًا ذو قطبية واحدة، إما شمالًا أو جنوبًا. ستكون هذه الأقطاب المتعارضة متقابلة مباشرة مع بعضها البعض وستخلق مجالًا مغناطيسيًا متوازنًا.
إذا تم كسر واحد أو أكثر من قضبان الجزء الدوار، فلن يتدفق التيار في ذلك الجزء من الجزء الدوار عندما يتم وضعه تحت أحد المجالات المغناطيسية. ومع ذلك، نظرًا لأن القضبان الموجودة على جانبي الكسر متصلة، فإن التيار سوف يتدفق عبر هذه القضبان مما يوفر مسارًا كاملاً لتدفق التيار. يؤدي هذا إلى إنشاء نقطة ميتة على الدوار في موقع الشريط أو القضبان المكسورة. عندما يتم وضع هذه النقطة الميتة تحت أحد المجالات المغناطيسية، سيتم إنشاء عدم توازن كهربائي. سيؤدي عدم التوازن الكهربائي هذا إلى دمج أي قوى ميكانيكية تعمل على نظام الدوار ويؤدي إلى تغيير إجمالي قوى الدوار.
كل من القضبان المكسورة والدوارات اللامركزية عبارة عن أخطاء ميكانيكية في الدوار، وسوف تدور مع الدوار. في المحرك التحريضي، يدور الجزء المتحرك بسرعة أقل من سرعة المجال المغناطيسي الدوار، وبالتالي فإن الأعطال الميكانيكية سوف تتحرك داخل وخارج المجالات المغناطيسية. أثناء دوران الجزء المتحرك الذي يحتوي على عيوب، فإن القوى الكهربائية المؤثرة على الجزء المتحرك سوف تزيد وتتناقص اعتمادًا على موضع القضبان المكسورة بالنسبة للمجال المغناطيسي. يؤدي هذا إلى تعديل القوى الكهربائية والميكانيكية المدمجة. سيكون تردد التعديل مساويا لعدد الأقطاب مضروبا في سرعة انزلاق الدوار. يُشار إلى هذا التردد عادةً باسم تردد تمرير القطب (PPF).
الدوار الحساس حراريا:
يبدو أن بعض دوارات المحركات الحثية المتناوبة تتغير القوى القادمة من الدوار مع الحمل. يحدث هذا عادةً بسبب انحناء الدوارات مع تدفق التيار عبرها وزيادة الدوار. سبب حدوث ذلك هو نتيجة التصفيحات الأساسية القصيرة، أو سمك غير منتظم لصفائح الدوار، أو صب الفراغات في الدوارات المصبوبة. في أي من الحالات المذكورة أعلاه، يصبح أحد جوانب الدوار أكثر سخونة من الجانب المقابل، مما يسمح للجزء الأكثر سخونة من الدوار بالتمدد أو التمدد مما يؤدي إلى انحناء الدوار. سوف يتسبب الدوار المنحني في أن يعمل الدوار بشكل لامركزي ويظهر على شكل انحراف ديناميكي.
عندما يؤثر العطل على المجال المغناطيسي للدوار، فإن قوى عدم التوازن سوف تتسبب في تعديل قوى الدوار المجمعة. سيؤدي هذا إلى تعديل سعة اهتزاز الماكينة عند سرعة الدوران أيضًا. سوف يتسبب تحويل فورييه السريع (FFT) للإشارة ذات الاتساع في حدوث نطاقات جانبية حول التردد الأساسي، والذي يكون في هذه الحالة ضعف سرعة التشغيل. يشير وجود النطاقات الجانبية إلى وجود تعديل السعة ويشير تباعد النطاقات الجانبية إلى تردد التعديل. إذا كان العطل قادمًا من الجزء الدوار، فسيتم تباعد النطاقات الجانبية عند تردد تمرير القطب. نظرًا لأن كل خطأ من أخطاء الدوار الثلاثة الشائعة الموصوفة أعلاه يتسبب في أن قوى الدوار تعدل التحويل السريع FFT لكل خطأ، فسوف تظهر كذروة طيفية عند سرعة الدوران مع نطاقات جانبية PPF.
الأعطال الميكانيكية:
سوف تظهر الأعطال الميكانيكية الأخرى في المحرك كما هي الحال في أي جهاز آخر. سيتم تحديد الخلل في التحويل السريع FFT، بناءً على التردد أو في بعض الحالات نمط التحويل السريع FFT. يمكن الحصول على هذه الترددات من أي عدد من الرسوم البيانية أو الجداول.
تحليل التوقيع الكهربائي (ESA):
يقيس تحليل التوقيع الكهربائي جميع المراحل الثلاث للتيار والجهد في وحدة التحكم في المحرك، أثناء تشغيل الماكينة. من خلال قياس جميع المراحل الثلاث للجهد والتيار، يتم إجراء تحليل كامل للطاقة التي يتم توفيرها للمحرك في كل مرة يتم فيها أخذ بيانات وكالة الفضاء الأوروبية. بالإضافة إلى ذلك، يتم إجراء التحويل السريع (FFT) على شكل موجة الجهد والتيار.
أظهرت الاختبارات والأبحاث أن العديد من الأخطاء الميكانيكية والكهربائية في نظام المحرك ستتسبب في تعديل تيار المحرك عند تردد العطل.
تحليل القوة:
لن يحدد تحليل الطاقة المشكلات المتعلقة بالمحرك فحسب، بل سيحدد أيضًا أي مشكلات في الطاقة الواردة مثل المحتوى التوافقي الزائد، وعدم توازن الجهد، وعدم تطابق الجهد، وعدم توازن التيار، وعامل الطاقة لنظام المحرك وكفاءة نظام المحرك. أيضًا، نظرًا لأن وكالة الفضاء الأوروبية تقيس جميع المراحل الثلاث للجهد والتيار في وقت واحد، فيمكنها تحديد الحمل على المحرك بدقة شديدة. وهذا يسمح لبرنامج وكالة الفضاء الأوروبية بتحديد سرعة الدوار الفعلية بدقة؛ عادةً ما يتم قياس سرعة التشغيل خلال 1 دورة في الدقيقة.
تحليل التحويل السريع:
يحدد FFT للتيار الأخطاء في النظام الحركي المشابه لـ MVA أو تقنيات تحليل التوقيع الأخرى. ومع ذلك، فإن إجراء تحويل فورييه السريع (FFT) على كل من جهد المحرك وأشكال الموجات الحالية يوفر إمكانات تشخيصية إضافية، عند مقارنته بـ MVA وتحليل التوقيع الحالي للمحرك (MCSA). يقوم كل من MVA وMCSA بقياس استجابة النظام الحركي فقط. إذا كانت هناك قمم طيفية كبيرة في الطيف الحالي أو طيف الاهتزاز، والتي تكون نتيجة لتردد حامل في الطاقة الواردة، فهذا غير قابل للاكتشاف باستخدام أي من هذه التقنيات. ومع ذلك، من خلال إجراء التحويل السريع (FFT) على كل من الجهد والتيار، فإن أي قمم طيفية موجودة تأتي من الطاقة الواردة. ومع ذلك، إذا لم تكن هناك قمم طيفية في طيف الجهد الموجود في الطيف الحالي، فإن الخلل يأتي إما من المحرك أو الآلة المدفوعة.
أخطاء الجزء الثابت:
يتم تصنيف أخطاء الجزء الثابت في وكالة الفضاء الأوروبية على أنها كهربائية أو ميكانيكية بطبيعتها.
الأعطال الميكانيكية للجزء الثابت:
يتم إنشاء الأخطاء المصنفة كأعطال ميكانيكية للجزء الثابت عندما يصبح قلب الجزء الثابت مفككًا في إطار المحرك، أو إذا كانت اللفات مفكوكة في فتحات الجزء الثابت. سيؤدي أي من هذه الأخطاء إلى ظهور مجالات مغناطيسية ناتجة عن الانقطاعات في الحديد الثابت، حيث يتم وضع اللفات لتعديلها. تُعرف هذه الترددات باسم ترددات تمرير فتحة الجزء الثابت، والتي يتم تحديدها عن طريق ضرب عدد فتحات الجزء الثابت في سرعة التشغيل.
على الرغم من أن هذا ليس كارثيًا على الفور، إلا أنه إذا سمح باستمرار أي ارتخاء، فإنه سيؤدي إلى انهيار العزل إما لعزل الملف (حيث يؤدي الارتخاء إلى تآكل عزل الملف)، أو يتسبب في انهيار عزل الجدار الأرضي وإنشاء خطأ ارضي. سيؤدي أي من هذه الأخطاء في النهاية إلى فشل كامل في اللف، وأفضل السيناريوهات هو إعادة لف المحرك أو التدمير الكامل للمحرك. في حالة تلف الحديد الثابت أثناء العطل، سيتطلب هذا العطل استبدال المحرك بالكامل. عادة ما يكون خلل ترددات تمرير فتحة الجزء الثابت طفيفًا جدًا لدرجة أن MVA لن تلتقط هذه الأخطاء حتى يصل الخطأ إلى مرحلة متقدمة جدًا. سوف تتسبب هذه الأخطاء في تحرك المكون السائب أو حديد الجزء الثابت أو الملف، حيث يدور المجال المغناطيسي حول الجزء الثابت، وهو ما سيتم الإشارة إليه من خلال النطاقات الجانبية لتردد الخط المحيطة بتردد تمرير فتحة الجزء الثابت.
الجزء الثابت الكهربائية:
في حالة انهيار العزل بين ملفات الجزء الثابت والأرض، سيحدث خطأ متعرج أو خطأ أرضي. تؤدي هذه العيوب إلى تسخين موضعي والمزيد من تدهور العزل حتى يحترق الملف في النهاية ويدمر الملف تمامًا وفي الحالات الشديدة يشوه أو يحرق العزل الصفحي الداخلي.
عندما تحدث هذه العيوب، تؤدي نقاط الضعف في الملف إلى تعديل ترددات تمرير فتحة الجزء الثابت عند تردد الخط، حيث يدور المجال المغناطيسي حول الجزء الثابت. سيتم تعديلها بشكل أكبر مع دوران العمود، مما سيؤدي إلى إنشاء نطاقات جانبية لسرعة التشغيل حول النطاقات الجانبية لتردد الخط.
يمكن لوكالة الفضاء الأوروبية (ESA) تحديد الأخطاء التي تم تصنيفها على أنها أخطاء كهربائية ثابتة، ولكن لتأكيد نوع الخطأ، يوصى بإجراء تحليل دائرة المحرك مع إلغاء تنشيط المحرك.
مرة أخرى، تكون هذه التعديلات في تردد تمرير فتحة الجزء الثابت طفيفة جدًا وتكون القوى الناتجة صغيرة جدًا ولا يمكن اكتشافها عادةً باستخدام MVA.
أخطاء الدوار:
أخطاء الدوار الشائعة التي تم اكتشافها باستخدام وكالة الفضاء الأوروبية هي الانحراف الساكن (فجوات هوائية غير متساوية)، واللامركزية الديناميكية (الدوار اللامركزي)، وقضبان الدوار المكسورة.
الانحراف الساكن:
عندما يكون قلب الجزء المتحرك متحد المركز ومتمركزًا في المجال المغناطيسي، فإن التيار المتدفق عبر قضبان الجزء المتحرك سيكون متساويًا ومتضادًا على الجانبين المتقابلين من الجزء المتحرك. لكن، إذا لم يكن الجزء المتحرك متمركزًا في المجال المغناطيسي، فإن قوة المجال المغناطيسي في قضبان الجزء المتحرك الأقرب إلى الجزء الثابت ستكون أقوى من الجانب المقابل. بالإضافة إلى ذلك، أثناء دوران الأقطاب المغناطيسية حول الجزء الثابت، سيؤدي ذلك إلى تعديل المجال المغناطيسي حول قضبان الجزء الثابت في كل مرة يمر فيها أحد الأقطاب بالخلوص الضيق. سيؤدي هذا إلى إنشاء ضعف القمم الطيفية لتردد الخط، حول تردد مرور القضيب الدوار. تردد تمرير شريط الدوار يساوي عدد قضبان الدوار مضروبًا في سرعة التشغيل.
الانحراف الديناميكي:
إذا كان الجزء المتحرك متمركزًا، ولكن قلب الجزء المتحرك غريب الأطوار، فسيؤدي ذلك إلى إنشاء فجوة هوائية ضيقة تدور حول فجوة الهواء الداخلية مع الدوار. تخلق فجوة الهواء الضيقة نطاقات جانبية لتردد الخط المزدوج (2xLF) حول تردد تمرير شريط الدوار، ولكن نظرًا لأن الخلوص الضيق يدور في فجوة الهواء، عند سرعة الدوار، فسوف يتسبب ذلك في تعديل النطاقات الجانبية 2xLF بسرعة الدوار. يؤدي هذا إلى إنشاء نطاقات جانبية لسرعة التشغيل حول النطاقات الجانبية 2xLF.
قضبان الدوار المكسورة:
عندما تمر النقطة الميتة في الجزء المتحرك تحت مجال مغناطيسي، لن تكون هناك محاثة بين المجال المغناطيسي للجزء الثابت والجزء المتحرك. سيؤدي هذا إلى تعديل تيار المحرك عند PPF، مما يؤدي إلى إنشاء نطاقات جانبية لتردد PPF حول تردد الخط في الطيف الحالي.
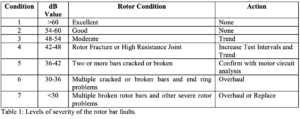
أثبتت الأبحاث أن شدة خطأ القضيب الدوار تعتمد على علاقة التعديل؛ وقد تم تحديد سبعة مستويات من الخطورة، انظر الجدول 1.
الأعطال الميكانيكية:
أي أخطاء ميكانيكية من شأنها أن تخلق اهتزازات على المعدات الدوارة تعمل بمثابة حمل على المحرك. حتى الاستجابة الصغيرة جدًا للصدمات، مثل الترددات الطبيعية لنظام التحمل، يمكن اكتشافها بسهولة باستخدام وكالة الفضاء الأوروبية. تظهر الأعطال الميكانيكية في طيف وكالة الفضاء الأوروبية كترددات مركزية للنطاقات الجانبية لتردد الخط.
طيف الدمود:
تولد وكالة الفضاء الأوروبية أيضًا طيفًا تجريبيًا منخفض التردد، Fmax 120 هرتز. الطيف التجريبي هو تقنية معالجة الإشارات التي تجرد إشارة تردد الخط من إشارة شكل موجة الوقت الملتقطة. كل ما تبقى في الإشارة المعالجة هو الترددات التي تتسبب في تعديل تيار المحرك. يعرض تحويل فورييه السريع (FFT) لإشارة العملية هذه بوضوح شديد جميع ترددات الأخطاء، مثل الأخطاء القادمة من الدوار بما في ذلك عدم التوازن واختلال المحاذاة (ليس فقط على المحرك ولكن في كثير من الحالات على الماكينة المدفوعة أيضًا). تظهر قمم PPF وسرعة التشغيل (RS) التي تظهر عادةً كنطاقات جانبية حول تردد الخط في الطيف الحالي العادي كقمم واحدة في الطيف التجريبي. يساعد هذا البرنامج على تحديد RS الفعلي لنظام المحرك بدقة شديدة في وقت التقاط البيانات، عادةً في حدود دقة 1 دورة في الدقيقة. سوف تظهر ترددات الأعطال الأخرى التي تقل عن 120 هرتز على شكل قمم مفردة في الطيف التجريبي ويمكن اكتشاف عيوب الحزام بسهولة شديدة باستخدام الطيف التجريبي.
أخطاء ميكانيكية أخرى:
سوف تظهر مشكلات شبكة التروس ومرور الريشة وأي قوة ميكانيكية أخرى موجودة في أي مكان في نظام المحرك في طيف التيار عالي التردد كترددات مركزية بين النطاقات الجانبية لتردد الخط.
عيوب تحمل العنصر المتداول:
تظهر عيوب المحامل المبكرة والمتأخرة من المرحلة 2 بشكل واضح جدًا في طيف التيار عالي التردد كنطاقات جانبية لتردد الخط تحيط بمضاعف غير صحيح لسرعة التشغيل.
ما هو مستقبل وكالة الفضاء الأوروبية؟
أشارت الاختبارات الأولية إلى أن وكالة الفضاء الأوروبية هي واحدة من أقوى الأدوات المتاحة لفحص الآلات التي تعمل بمحرك. في جميع الحالات تقريبًا، تظهر العيوب في وقت مبكر جدًا في بيانات وكالة الفضاء الأوروبية مقارنةً بالـ MVA نظرًا لأن قوة العطل لا يجب أن تكون كافية لتحريك هيكل الآلة بأكمله، كما هو الحال مع الاهتزاز الميكانيكي. كما أن وكالة الفضاء الأوروبية قادرة على تحديد حالة الطاقة الموردة لنظام المحرك وكذلك تحديد كفاءة المحرك، والأهم من ذلك سرعة التشغيل الدقيقة للمحرك في وقت أخذ البيانات. يعد هذا القياس أمرًا بالغ الأهمية عند استخدام ESA وMVA، نظرًا لأن معظم الأخطاء في نظام المحرك تعتمد على السرعة ويعتبر التحديد الدقيق لسرعة التشغيل أمرًا بالغ الأهمية لتحليل الطيف الدقيق.
استجابة التردد:
نظرًا لأن وكالة الفضاء الأوروبية تستخدم التغيرات في تيار المحرك كمعرفات للأعطال، فيمكن اكتشاف الأعطال ذات التردد المنخفض جدًا والمرتفع جدًا. MVA لها حدود بناءً على نوع القياس (نسبي أو مطلق) واستجابة التردد للمستشعر.
المضخات العمودية للآبار العميقة:
أظهرت تجربة المضخات العمودية أن الأعطال في المضخة لا تنتقل إلى المحرك. لتحديد ما يجري في المضخة من الضروري وضع محولات الطاقة على المضخة نفسها. لا يتم اكتشاف أخطاء المضخة على المحرك إلا بعد تدمير المضخة بالكامل. أظهر الاختبار الأولي أنه يمكن اكتشاف كميات صغيرة من التجويف وحتى ترددات تمرير الريشة في المضخة بسهولة باستخدام وكالة الفضاء الأوروبية. لم يُظهر طيف MVA المأخوذ في نفس الوقت أي دليل على أي خطأ.
محركات التردد المتغير:
عند استخدام ESA لاختبار المحركات التي تعمل بواسطة VFDs، لا يمكن اكتشاف أخطاء نظام المحرك فحسب، بل يمكن أيضًا اكتشاف المكثفات القديمة والمشكلات الكهربائية الأخرى في محرك الأقراص بسهولة شديدة.
لمزيد من المعلومات حول تحليل التوقيع الكهربائي أو كيفية تحسين موثوقية نظام المحرك في مصنعك، انتقل إلى www.alltestpro.com أو أرسل بريدًا إلكترونيًا إلى [email protected].

AT34™
قم بتحليل وتوجيه سلامة مكونات المحرك بحثًا عن الأعطال الأرضية، وأخطاء اللف الداخلي، والوصلات المفتوحة، والتلوث – كل ذلك باستخدام جهاز واحد محمول باليد.

ندوة تشخيصية للسيارات من الطراز العالمي عبر الإنترنت – المستوى 1 – من 12 إلى 16 يونيو
هل سمعت؟ سنعقد ندوة تشخيص السيارات العالمية المستوى 1 في الفترة من 12 إلى 16 يونيو . ستكون هذه ندوة عبر الإنترنت / افتراضية تبدأ كل يوم في الساعة 8 […]

Preconlub 15-16 يونيو 2023 ليون ، المكسيك
تعال وانضم إلى المدير الإقليمي لاتام ATP ، جلوريا أوريزار ، كما تقدم في Preconlub 2023! المزيد من التفاصيل: https://www.preconlub.com/ غلوريا اوريزار المدير […]