전기적 시그니처 분석과 진동 분석
초록:
회전하는 기계는 결함으로 인해 샤프트의 기하학적 중심선이 주기적으로 움직일 때 특정 특성을 보인다는 것은 잘 알려져 있습니다. 70년 이상 동안 기계 진동 분석(MVA)은 이러한 결함의 심각성을 식별하고 결정하는 데 사용되어 왔으며, 많은 성공적인 플랜트 신뢰성 프로그램의 필수적인 부분입니다. 최근의 경험과 연구에 따르면 전기적 서명 분석(ESA)을 사용하여 이러한 동일한 결함 중 상당수를 식별할 수 있음이 입증되었습니다. ESA는 또한 발전소로 들어오는 전력, 모터에 공급되는 전력, 모터 시스템 내의 전기적 및 기계적 결함을 평가하고 식별합니다. 또한 ESA는 일부 전기 신뢰성 프로그램에서 매우 중요한 기술로 부상하고 있습니다. 일부 공장에서는 전기 모터로 구동되는 기계의 전기적 문제와 기계적 문제를 모두 식별하기 위한 주요 감지 도구로 사용하고 있습니다. 이 백서에서는 이 두 가지 동적 예측 유지보수 프로그램(PdM) 기술을 살펴보고 각 기술의 장단점을 파악하여 신뢰성 프로그램에서 이 두 기술이 가장 적합한 위치를 결정하려고 합니다.
핵심 단어: 데모드 스펙트럼; 감지 단계; 전기적 서명 분석; FFT 분석; 기계 진동; 모터 시스템 결함; 회전자 전기; 고정자 전기.
유지 관리 철학:
자본 집약적인 장비를 많이 보유한 기업은 서비스를 제공하거나 이 고도의 자본 집약적인 장비로 제품을 생산합니다. 이 장비를 보호하고 작동 상태를 유지하려면 유지보수를 수행해야 합니다. 시간이 지남에 따라 기업들은 더 낮은 비용으로 더 높은 품질의 제품을 생산하고 더 높은 수익을 얻어야 한다는 압박을 계속 받고 있습니다. 또한 서비스 제공업체는 훨씬 저렴한 비용으로 더욱 안정적인 서비스를 제공해야 합니다. 이를 위해서는 유지 관리 부서에서 이 장비를 적절하게 유지 관리해야 할 뿐만 아니라 더 낮은 비용으로 유지 관리해야 합니다.
이러한 압박은 유지 관리 관행이나 철학의 진화로 이어졌습니다. 초기 유지 관리 관행은 “고장 시까지 실행”(RTF)으로 알려져 있었지만 업계의 압력으로 인해 이러한 관행이 정밀(또는 사전 예방적) 유지 관리로 발전했습니다.
이러한 유지 관리 철학과 비용을 간략히 살펴보면 이러한 관행의 발전이 왜 필요한지 이해할 수 있습니다. 이러한 RTF, 예방 및 예측 유지보수 비용은 1970년대 후반 미국 남부의 한 정유 공장에서 이러한 진화를 통해 유지보수 비용을 추적하여 발표한 기사에서 추출한 것입니다. 정밀 비용은 1990년대 초에 정밀 유지보수를 시행한 많은 플랜트의 결과를 바탕으로 생활비에 맞게 추가 및 조정되었습니다.
실패할 때까지 실행($17 -18/HP/년):
이 접근 방식은 기계를 켜고 끄는 것과 제품을 공급하는 것 외에는 거의 관여할 필요가 없습니다. 이러한 방식으로 기계는 중단 없이 계속 작동합니다. 그러나 고장이 발생하면 일반적으로 매우 심각하여 원래 구성 요소에 고장이 발생할 뿐만 아니라 연결된 기계 및 기초와 같은 해당 기계의 다른 구성 요소에 손상을 초래합니다. 이러한 추가적인 피해는 일반적으로 고장이 나지 않고 공장 내 예비 부품에서 거의 발견되지 않는 부품의 손상을 초래하는 경우가 많습니다.
이러한 부품을 수리하거나 교체하려면 자체적으로 제조하거나 원래 제조업체에서 구매해야 하며, 이 경우 높은 비용과 긴 리드 타임으로 인해 가동 중단이 길어질 수 있습니다. 따라서 RTF는 플랜트 장비를 유지보수하는 데 가장 비용이 많이 드는 방법이 됩니다. 이는 생산 비용 손실을 고려하지 않은 금액입니다. 이러한 비용은 예측하고 측정하기가 매우 어렵지만, 경험에 따르면 유지보수 비용 증가는 일반적으로 추가적인 다운타임으로 이어집니다.
예방적 유지 관리($11~12/HP/년):
이러한 유지 관리 철학은 기계 장비가 시간이 지남에 따라 마모되고 고장난다는 가정에 기반합니다. 기계 설계자와 제조업체는 기계에 대한 권장 유지보수 요구 사항과 검사 주기를 결정하기 위해 기계를 조사하고 연구합니다. 그런 다음 미리 정해진 시간 간격으로 권장 유지 관리 및 검사를 수행합니다.
그러나 1980년대 중반 놀란과 힙이 수행한 신뢰성 연구에 따르면 기계는 제시간에 고장 나지 않는다고 합니다. 너무 일찍 또는 너무 늦게 실패합니다. 기계가 너무 일찍 고장 나면 ‘고장 날 때까지 가동’하는 유지보수와 관련된 문제와 비용이 발생하고, 너무 늦게 고장 나면 불필요한 유지보수에 많은 시간이 소요되고 부품을 조기에 교체해야 합니다. 더 중요한 것은 이 연구에서 기계 고장의 약 11%만이 연령과 관련이 있고 89%는 무작위적이라는 사실이 밝혀졌다는 것입니다. 이는 기본적으로 예방적 유지 관리가 장애의 11%에는 효과적이지만 89%에는 효과가 없다는 것을 의미합니다. 또한 고장의 68%가 기계 설치 또는 수리 직후에 발생하며, 이 기간을 흔히 침입 기간이라고 하며 기계가 복잡할수록 침입 기간 동안 기계가 고장날 가능성이 높다고 보고했습니다.
예측 유지 관리($7~8/HP/년):
상태 모니터링을 사용하여 유지 관리 비용을 추가로 절감할 수 있었습니다. 1960년대 초, 기업들은 회전 장비가 고장 나기 시작하면 작동 조건이 바뀔 수 있다는 사실을 인지했습니다. 이러한 작동 조건을 정기적으로 모니터링하여 이러한 변화에 대한 사전 경고를 통해 치명적인 고장이 발생하기 전에 기계를 작동에서 제거할 수 있는 충분한 시간을 확보할 수 있습니다.
이러한 유지 관리 철학은 1980년대 초부터 마이크로프로세서 기반 데이터 수집기가 도입되면서 더욱 확대되었습니다. 온도, 압력, 오일 상태, 진동 및 성능과 같은 기계의 작동 특성을 측정하고 추세를 파악하여 변화를 파악할 수 있습니다. 경우에 따라 이러한 측정값을 미리 정해진 값과 비교하면 추세를 파악하지 않고도 기계의 상태를 빠르게 파악할 수 있습니다. 그 결과 예측 유지 관리 프로그램(PdM)을 빠르게 수용하고 구현할 수 있었습니다. 예측 유지보수는 다양한 기계 측정값을 사용하여 기계의 상태를 파악합니다. 다양한 PdM 기술이 있으며, 가장 성공적인 프로그램은 여러 기술을 사용하여 가장 많은 정보를 제공하고 결과적으로 문제가 발생하는 기계를 식별할 확률이 가장 높습니다.
많은 PdM 프로그램이 ‘임목맹(나무만 보고 숲을 보지 못하는 현상)’에 시달리고 있습니다. 데이터 수집에 너무 많은 시간을 할애하다 보니 분석할 시간이 없거나 ‘덜 중요한’ 머신을 소홀히 합니다.
가장 성공적인 PdM 프로그램은 효과적인 스크리닝을 사용합니다. 탐지 단계의 목표는 ‘불량 머신’을 식별하는 것입니다. 불량 기계가 확인되면 추가 측정 또는 기술을 사용하여 기계의 상태를 변화시킨 원인을 파악한 다음 적절한 시정 조치를 취하여 기계를 양호한 상태로 되돌릴 수 있습니다. 이러한 진화를 통해 3단계의 PdM이 확립되었습니다. 세 단계는 감지, 분석 및 수정입니다. 일부 프로그램에서는 검증이라는 네 번째 단계를 추가하기도 하지만, 저는 검증도 수정 단계의 일부라고 생각합니다.
가장 일반적인 PdM 기술로는 기계 진동 분석(MVA), 적외선 서모그래피, 울트라소닉스, 오일 분석, 모터 회로 분석(MCA), 전기적 서명 분석(ESA) 등이 있습니다. 가장 성공적인 PdM 기술의 공통적인 특징은 수행하기 쉽고 비파괴적이고 반복 가능한 측정을 제공한다는 점입니다.
탐지 단계:
이 단계는 일반적으로 가장 중요한 단계이자 전체 PdM 프로그램의 기초입니다. 감지 단계에서는 선택한 장비의 작동 특성을 주기적으로 모니터링합니다. 이러한 값은 추세를 파악하고 변경 사항이 있는지 검사합니다. 데이터 수집 프로세스는 가능한 한 많은 머신을 모니터링하기 위해 신속하고 신중하게 수행되어야 합니다. 변화가 감지되면 기계 상태 변화의 원인을 파악하기 위해 분석 목적으로 추가 데이터를 수집합니다.
탐지 단계에서는 장애가 발생한 머신을 식별하는 것이 가장 큰 목적입니다. 즉, 가능한 한 짧은 시간 내에 최대한 많은 머신을 검사해야 합니다. 그런 다음 대부분의 PdM 소프트웨어 프로그램은 수집된 데이터를 보고 의심스러운 머신을 식별합니다.
분석 단계:
이 단계에서는 탐지 단계와는 다른 유형의 데이터를 추가로 수집합니다. 이 추가 데이터는 일반적으로 추가 데이터 수집이 필요합니다. 탐지 단계에서는 소수의 머신(성숙한 프로그램의 경우 2%에서 3% 정도)만이 중요한 변화를 나타내므로, 일반적으로 탐지 프로세스 중에 변화를 식별하는 데 필요한 데이터를 빠르게 수집한 다음, 변화가 감지되면 다시 돌아가서 더 자세히 살펴보는 것이 시간적으로 더 효율적입니다.
그러나 플랜트 현장이 멀리 떨어져 있거나 기타 액세스 제한이 있는 경우 감지 단계에서 더 자세한 데이터를 수집하는 것이 정당화될 수 있습니다. 많은 플랜트와 현장에서 이러한 애플리케이션을 위한 모니터링 시스템을 영구적으로 설치하기로 결정합니다.
수정 단계:
이 단계에서는 상태 변경을 유발한 문제를 수정하고 제거합니다. 팬 청소, 베어링 또는 마모된 커플링 교체 등이 필요할 수 있습니다. 허용 가능한 진동 수준 또는 기타 성능 측정 수준에 따라 정확한 수정 및 수리 유형이 결정됩니다. 이러한 문제를 수정하고 제거하기 위한 자세한 내용은 이 백서의 뒷부분에 나와 있습니다.
탐지 단계에서 수집한 데이터는 일반적으로 예비 분석 이외의 다른 정보를 제공하기에는 충분하지 않습니다. 더 자세한 분석을 수행하려면 다른 유형과 더 많은 관련 데이터를 수집해야 합니다. 경우에 따라 다양한 조건과 여러 기술을 사용하여 기계를 작동해야 할 수도 있습니다. 탐지 데이터 결과만을 사용하여 문제를 분석하려고 시도하는 것은 신뢰할 수 있는 분석이 아닙니다. 보다 정확한 분석을 위해 탐지 단계에서 충분한 데이터를 수집하면 탐지 프로세스가 느려집니다. 대부분의 숙련된 신뢰성 부서는 이 두 단계를 분리하는 것이 중요하다는 것을 인식하고 있습니다.
전기적 신뢰성:
대부분의 사람들은 전기적 신뢰성이 플랜트에 전력을 성공적으로 공급하는 것으로 끝나는 것으로만 생각합니다. 전력은 오늘날 산업에서 사용되는 가장 중요한 원자재 중 하나입니다. 지속적인 전력 흐름이 있어야 할 뿐만 아니라 깨끗하고 균형 잡힌 전력이어야 합니다. 그러나 이 중요한 원자재는 공장에 공급되는 원자재 중 가장 검사가 덜 이루어지는 원자재이기도 합니다.
제품을 생산하거나 공장의 장비가 수행하도록 설계된 서비스를 제공하는 대부분의 장비를 작동시키는 원동력을 제공하기 위해 공장의 거의 모든 영역에서 전기가 필요합니다. 전기는 지속적인 흐름이 필요하고, 편리하게 보관할 수 없으며, 일반적으로 사용 전에 검사하지 않는다는 점에서 그 자체로 독특한 제품입니다.
전원 품질이 고장이나 장애의 원인일 수 있습니다. 열악한 ‘전력 품질’의 결과는 일반적으로 장기적으로 발생하며 항상 문제의 원인으로 간주되는 것은 아닙니다. 모터가 타거나 차단기가 트립되면 모터와 구동 기계에 대한 전기 및 기계 검사를 실시한 다음 모터를 재건하거나 교체하고 전체 프로세스를 반복합니다. 또한 오늘날의 최신 기계와 장비로 인해 더 나은 전력 품질에 대한 필요성이 더욱 커지고 있습니다. 그러나 전력을 검사하는 경우, 전력이 공장에 들어오는 시점에 검사할 수 있으며 일상적으로 검사하지 않을 수도 있습니다. 모터나 장비 자체에 공급되는 시점에서도 검사하지 않습니다.
전력은 일반적으로 사용 지점에서 멀리 떨어진 곳에서 생성되며, 원래 발전의 신뢰성을 알 수 없고 다른 많은 발전기와 함께 전력망에 결합됩니다. 전기는 여러 가지 변압기와 수 마일의 가공 및 지하 케이블을 거쳐 공장에 도착하기 전에 전송됩니다. 이러한 배전 시스템의 대부분은 여러 다른 기관에서 소유, 관리 및 유지 관리합니다. 불량 전력 또는 ‘품질이 좋지 않은’ 전력이 전력망에 공급되면 사용자가 이를 제거하거나 거부할 수 없습니다.
대부분의 발전소는 소규모의 개인 소유입니다. 전력 품질을 규제하고 표준화하기 위한 작업이 진행 중이며, 많은 주에서 자체적인 전문 표준 및 규정을 마련하고 있습니다. 그러나 발전된 전력이 반드시 발전이 이루어지는 주 경계에서 멈추는 것은 아닙니다.
전력이 ‘양호한 품질’로 플랜트에 도착하더라도 모터 시스템 내에는 플랜트 운영의 지속적인 성공에 악영향을 미칠 수 있는 많은 영역이 존재합니다.
전기 모터 시스템:
모터 자체보다 더 많은 것이 플랜트 신뢰성에 영향을 미칠 수 있습니다. 실제로 모터 시스템 내의 모든 것이 모터 시스템의 고장을 일으킬 수 있으며, 이는 공정 중단으로 이어질 수 있습니다. 효과적인 감지는 잠재적인 문제가 있는지 기계에서 선별합니다. 감지 방법은 가능한 한 적은 측정으로 모터 시스템을 최대한 많이 선별하는 것이 합리적입니다. 이 감지 방법은 가능한 한 많은 잠재적 장애를 식별하는 데도 사용됩니다. 효과적인 검사 방법을 선택할 때는 모터 시스템에서 고장을 일으키는 문제를 식별하는 것도 필요합니다. 이러한 질문에 대한 답을 찾은 후에는 최소한의 시간 내에 최대한 많은 머신을 검사할 수 있는 가능한 방법을 파악해야 합니다.
모터 시스템은 모터/구동 서브시스템과 기계식 서브시스템의 두 가지 하위 시스템으로 구성됩니다. 모터/구동 서브시스템은 변압기, 케이블 및 스위칭 장치를 포함하여 플랜트로 들어오는 전력으로 시작됩니다. 그런 다음 들어오는 전원이 배전 또는 모터 제어 센터(MCC)로 공급됩니다. MCC는 시동기, 과부하 등의 보호 장치, 가변 주파수 드라이브 및 모터에 전력을 안전하게 전달하여 성공적으로 작동하고 제어하는 다양한 기타 시스템으로 구성됩니다.
전기 모터는 전기 에너지를 기계적 토크로 변환하므로 모터에는 전기 부품과 기계 부품이 모두 있습니다. 모터의 전기적 부분은 고정 부품 또는 고정자와 회전 부품 또는 회전자로 구성됩니다.
고정자 권선은 전류가 흐르는 경로를 제공하여 고정자에 자기장을 생성합니다. 로터는 권선 또는 막대로 구성되어 전류가 로터를 통과할 수 있는 경로를 제공하여 로터 자기장을 생성합니다. 로터 자기장과 고정자 자기장 사이의 상호 작용이 기계적 토크를 생성합니다. 기계식 하위 시스템은 모터의 기계적인 부분부터 시작됩니다. 이는 로터와 고정자 자기장의 상호 작용에 의해 생성된 토크를 구동 기계 또는 부하에 전달하는 샤프트에서 시작됩니다. 베어링은 회전하는 부품과 회전하지 않는 부품을 분리하고 모터 내부에 로터를 배치합니다. 모터 샤프트는 직접 커플링, 벨트 및 풀리 또는 때로는 기어와 같은 커플링 장치를 사용하여 부하에 연결됩니다.
구동 기계는 작업을 수행하는 시스템 부분으로, 펌프, 팬, 압축기, 공작 기계, 로봇, 밸브 스템 등 다양한 기계 장치 중에서 부하 역할을 하는 기계의 종류가 많습니다. 기계 시스템의 마지막 부분은 공정 자체로, 기계는 재료를 성형하거나 절단하고, 압력을 높이고, 공기 또는 기타 유형의 가스를 이동하고, 액체를 운반하거나, 재료를 혼합할 수 있습니다. 탐지 방법을 선택할 때는 시스템의 구성 요소를 가능한 한 많이 조사해야 합니다.
모터/구동 서브시스템:
모터/구동 하위 시스템에서 발생할 수 있는 결함 유형은 대부분 전기적 결함입니다.
들어오는 전원 오류는 전압 불일치, 비정현파, 전압 불균형 등 다양합니다. 이러한 원인은 공급업체에서 직접 제공하거나 변압기 권선의 단락 또는 변압기의 부적절한 탭 설정일 수 있습니다. 비정현파 전력은 모터 내부에 음의 시퀀싱 고조파를 설정하여 과도한 열을 발생시킬 수 있습니다.
제어 시스템의 결함은 버스 바 또는 케이블의 느슨한 연결, 침식, 부식 또는 느슨한 접촉기, 느슨한 퓨즈 연결 또는 과부하 릴레이 결함 등 다양할 수 있습니다. 연결이 느슨하고 접촉기가 부식되거나 움푹 패이면 전압 불균형이 발생하고, 모터에 가해지는 작은 전압 불균형은 최대 20배 이상의 전류 불균형을 일으켜 모터 시스템에 과도한 열을 발생시키는 순환 전류를 설정할 수 있습니다.
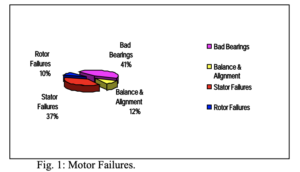
모터 시스템의 결함은 전기적 결함과 기계적 결함으로 구분할 수 있습니다. 1980년대 중반 전력 연구소는 모터 고장의 53%가 기계적(베어링 41%, 균형 및 정렬 12%), 47%가 전기적(권선 37%, 로터 10%)인 것으로 보고했습니다(그림 참조). 1. 권선 결함 중 83%는 권선 단락이고 17%만이 절연에서 접지 결함입니다. 로터 결함은 모터 유형 및 구조에 따라 다릅니다. 그러나 가장 일반적인 모터는 다람쥐 케이지 로터 유도 모터입니다. 다람쥐 케이지 로터의 일반적인 결함은 로터 바가 느슨하거나 파손된 경우, 동심원이 아닌 로터 또는 열에 민감한 로터입니다.
기계 서브시스템:
모터 내부의 기계적 결함은 기본적으로 다른 회전 장비와 동일합니다. 이러한 결함에는 불균형, 정렬 불량, 구부러진 샤프트, 느슨한 구성품, 마모 또는 결함 있는 베어링 등이 포함될 수 있습니다. 모터는 고정자 또는 회전자 자기장의 왜곡으로 인해 고장이 발생할 수 있습니다. 이러한 결함은 불균형, 정렬 불량 등과 같은 다른 기계적 힘과 상호 작용하는 기계적 힘을 생성합니다.
모터 내부에는 베어링을 사용하여 로터를 배치하고 회전하는 부품과 고정된 부품을 분리합니다. 일반적으로 롤링 요소 베어링과 슬리브 또는 저널 베어링의 두 가지 유형의 베어링이 사용됩니다.
커플링 결함은 커플링 장치 유형에 따라 다릅니다. 모터를 부하에 연결하는 데 사용할 수 있는 다양한 장치가 있습니다. 일부 장치는 모터를 구동 기계에 직접 연결하고 이러한 기계는 동일한 속도와 동일한 방향으로 작동합니다. 일부 장치는 속도나 방향 또는 둘 다를 변경합니다. 다른 일반적인 연결 장치로는 벨트, 풀리, 기어가 있습니다.
모든 커플링 유형에는 회전하는 부품에 불균형, 런아웃, 비정사각형 가공 또는 기타 맞춤 또는 조립 결함이 있을 수 있습니다.
벨트 및 풀리 배열은 풀리가 샤프트에 제대로 장착되지 않았거나 풀리가 부족하거나 벨트가 느슨해지거나 금이 가거나 닳아서 결함이 발생할 수 있습니다. 커플링 장치가 기어 배열인 경우, 일반적으로 한 기어의 톱니가 다른 기어와 ‘맞물려’ 작은 힘이 발생합니다. 기어 중 하나 또는 다른 기어가 소진된 경우 추가 결함이 발생합니다. 기어는 마모되거나 금이 가거나 부러질 수 있습니다.
구동되는 기계 또는 부하에는 회전력을 발생시킬 수 있는 다양한 수준의 불균형, 오정렬 또는 런아웃이 있을 수 있습니다. 펌프의 팬이나 컴프레서와 같은 원심력 기계는 기계의 회전 부분과 비회전 부분 사이에 상호 작용하는 유압력을 생성합니다. 이러한 힘은 임펠러 베인 또는 블레이드 중 하나가 펌프의 ‘절단된 물’과 같은 고정된 구성 요소를 통과할 때마다 움직임을 유발합니다.
프로세스 자체가 기계/모터 시스템에 작용하는 기계적 힘을 생성할 수 있습니다. 이러한 힘 중 일부는 기계 작동의 결과입니다. 펀치 프레스나 스탬핑 기계와 같은 기계는 정상 작동 중에 힘을 발생시킵니다. 캐비테이션 및 재순환과 같은 프로세스는 유체 시스템에 수압을 생성할 수 있습니다. 부하 변화와 같은 추가적인 공정 변화는 기계의 작동 온도와 압력을 변화시켜 각 기계의 열 성장 차이로 인해 정렬 변화를 일으킬 수 있습니다.
기계 진동:
기계 진동 측정은 트랜스듀서를 사용하여 구성 요소 또는 진동하는 기계 부품의 기계적 움직임을 측정합니다. 트랜스듀서는 이 기계적 움직임을 전기 신호로 변환합니다. 트랜스듀서는 움직이는 구성 요소에 직접 장착되거나 베어링 또는 기타 지지 구조물에 장착됩니다. 이 센서는 관찰 대상 부품(베어링 하우징 또는 샤프트 자체)의 기계적 움직임을 측정합니다.
부품의 움직임이 센서 쪽으로 이동하면 양의 전압 출력을 생성하고, 부품이 센서에서 멀어지면 음의 전압 출력을 생성합니다. 이를 통해 센서는 움직이는 구성 요소의 동작을 복제하는 출력 전기 신호를 생성할 수 있습니다. 전압의 양은 동작의 양을 나타냅니다.
뉴턴의 운동 제2법칙에 따르면 F=ma입니다. 이는 모션의 양이 컴포넌트에 가해지는 힘의 양을 나타낸다는 의미로 해석됩니다. 이것이 의미하는 바는 매우 큰 기계에서는 질량을 측정 가능한 양만큼 이동하려면 매우 큰 결함이 필요하다는 것입니다. 또한 측정에 사용되는 센서 유형에 따라 센서의 출력에 영향을 미칠 수 있습니다.
진동 측정:
진동 측정에는 상대 모션과 절대 모션의 두 가지 유형이 있습니다.
상대 모션:
첫 번째는 상대 측정으로, 측정된 구성 요소의 움직임을 다른 구성 요소와 연관시킵니다. 이러한 측정 중 가장 일반적인 것은 저널 베어링 내부의 샤프트 움직임을 측정하는 것입니다. 이 측정은 일반적으로 베어링 자체에 장착하거나 베어링을 통해 장착하는 센서인 비접촉식 와전류 프로브를 사용합니다. 이러한 측정은 샤프트가 베어링 내부에서 이동하는 경로와 운동량을 파악하는 데 매우 효과적인 것으로 입증되었습니다. 이러한 측정값은 밀(0.001인치) 또는 미크론(.000001m) 단위의 변위입니다.
이러한 유형의 센서의 가장 큰 장점은 측정된 모션을 내부 베어링 간극과 비교하여 매우 쉽게 비교할 수 있다는 것입니다. 단점은 센서가 장착된 부품이 움직이면 샤프트에 가해지는 힘을 정확하게 측정할 수 없다는 것입니다. 두 번째 단점은 더 높은 주파수에서의 변위는 매우 작지만 변위가 클 수 있다는 것입니다. 따라서 더 높은 주파수의 결함은 측정된 신호의 노이즈 플로어에 묻히게 됩니다.
앱솔루트 모션:
두 번째 진동 측정은 절대 모션입니다. 이 측정은 지구의 움직임과 비교하는 센서를 사용합니다. 가장 일반적인 센서는 동작 속도에 비례하는 출력 전압을 생성하는 유도형 센서입니다. 더 일반적으로 사용되는 센서는 가해지는 힘과 관련된 전하를 생성하는 압전 장치입니다.
유도형 센서와 압전형 센서에는 장단점이 있습니다. 이 두 가지 방법의 가장 큰 단점은 구름 요소 베어링 결함의 초기 단계와 같은 절대 운동을 측정하기 때문에 펌프 캐비티 내의 캐비테이션이나 깊은 우물 펌프의 유압력만으로는 받침대 또는 베어링 하우징을 움직이기에 충분하지 않다는 것입니다.
두 번째 단점은 센서의 주파수 응답입니다. 유도 센서는 저주파와 고주파 모두에서 심각하게 제한되는 반면, 압전 센서는 고주파에서 신호를 증폭합니다. 또한 센서의 방향이나 위치뿐만 아니라 센서의 장착 기술로 인해 선형성이 변경될 수 있습니다.
이러한 센서가 측정하는 힘은 측정 지점에서 결합된 모든 기계적 힘의 조합입니다. 대부분의 회전 기계에는 다양한 구성 요소가 있고 이러한 각 구성 요소는 기계에 반복적인 힘을 얼마든지 가할 수 있으므로 측정된 진동 신호는 여러 신호로 구성된 복잡한 신호가 됩니다.
기계 진동 분석(MVA):
기계 진동 분석 프로세스는 기계 진동에 존재하는 주파수를 식별한 다음 이를 기계적 및 전기적 결함으로 인해 생성되는 힘의 주파수와 연관시킵니다.
측정된 신호에 존재하는 주파수를 확인하기 위해 분석기는 신호에 대해 고속 푸리에 변환(FFT)을 수행합니다. 이 수학적 프로세스는 수집된 복잡한 시간 기반 신호를 시간 영역에서 주파수 영역으로 변환합니다. FFT는 이 복잡한 신호를 구성하기 위해 함께 결합된 진폭과 주파수를 식별합니다.
기계적 결함:
이러한 기계적 결함이 존재할 때 이러한 각 기계적 결함이 생성하는 빈도를 설명하는 수많은 차트, 표 및 논문이 있습니다. 이러한 결함 중 일부는 동일한 결함 주파수를 생성합니다. 불균형, 정렬 불량, 구부러진 샤프트, 금이 간 샤프트, 편심 로터와 같은 결함은 모두 로터의 결함으로 인해 발생하며 샤프트 회전 속도와 관련된 힘을 생성합니다. 많은 경우, 이러한 유사한 문제를 더욱 명확히 정의하기 위해 추가 측정을 수행하거나 추가 기술을 사용해야 합니다.
구름 요소 베어링 결함과 같은 다른 문제에는 베어링의 기하학적 구조뿐만 아니라 결함 단계에 따라 주파수가 달라집니다. 구름 베어링 결함의 문제점 중 하나는 초기 단계의 결함은 매우 낮은 진폭 신호를 생성하여 결함 발생 초기 단계에서 식별하기 어렵다는 것입니다.
전기적 결함:
전기 모터는 회전자 및 고정자의 자기장 상호 작용에 의해 작동합니다. 고정자 또는 회전자에 자기장이 불균형하거나 왜곡되면 모터 내부에 불균형한 전기력이 발생하게 됩니다. 이러한 힘은 회전하는 자기장이 왜곡되거나 불균형한 자기장을 통과할 때 로터가 모터 내부에서 움직이게 합니다.
고정자 전기적 결함:
코어의 모양은 자기장에 의해 결정됩니다. 고정자 코어와 회전자 모두 일반적으로 완벽하게 둥글게 설계됩니다.
불균등한 에어 갭:
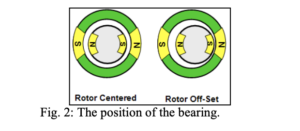
완벽하게 둥근 회전자 내부에 완벽하게 둥근 고정자를 중심으로 모든 자력이 동일하고 반대 방향으로 작용합니다. 그러나 로터가 어느 영역에서든 고정자에 더 가깝게 위치하면 자기장이 좁은 간극을 통과할 때 인력이 강해져 로터가 고정자 쪽으로 당겨지고 로터 반대쪽에는 인력이 약해져 간극이 더 넓은 곳으로 당겨집니다. 이렇게 하면 전기적 불균형이 발생하며 이를 불균등 에어 갭이라고 합니다.
고정자 내부의 로터 위치는 베어링의 위치에 따라 결정됩니다(그림 2 참조). 베어링은 베어링 하우징, 엔드 벨 및 기계 프레임의 가공된 맞춤에 의해 배치됩니다. 좁은 간격은 로터의 위치에 따라 결정되므로 불균등한 간격은 항상 에어 갭 내부의 동일한 위치에 있게 되며 이를 일반적으로 정적 편심이라고 합니다.
고정자 내부의 로터 에어 갭이 10% 상쇄된 2000마력 2극 모터의 경우, 로터가 ISO 밸런스 사양인 G 2.5로 밸런싱될 때 생성되는 전기력이 원심력보다 10배 이상 큰 것으로 확인되었습니다. 밸런스 사양이 G2.5이면 좋은 밸런스로 간주됩니다.
소프트 풋은 일반적으로 정렬 불량과 관련이 있지만, 모터에 교정되지 않은 소프트 풋이 있는 경우 홀드 다운 볼트를 조이면 베어링 위치가 재배치되어 정렬 불량 가능성이 발생할 뿐만 아니라 모터 케이스가 왜곡될 수 있습니다(그림 3 참조).
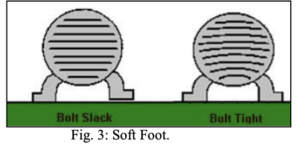
이렇게 왜곡된 케이싱은 고정자 철을 변형시켜 고정자 자기장을 변화시키고 불균등한 에어 갭과 유사한 상태를 만듭니다.
루즈 와인딩/스테이터 아이언:
모터 프레임에 고정자 철심이 느슨하거나 고정자 슬롯에 권선이 느슨한 경우, 고정자에서 발생하는 회전 자기장으로 인해 자기장 중 하나가 느슨한 부품을 통과할 때마다 느슨한 부품이 움직이게 됩니다. 이 세 가지 결함은 일반적으로 고정자 전기로 분류되는 진동 문제의 원인입니다. 이러한 결함의 주파수는 모두 회선 주파수의 2배에서 발생합니다. 다이렉트 드라이브 컨트롤러에서는 60Hz 애플리케이션의 경우 7200 CPM, 50Hz 애플리케이션의 경우 6000 CPM이 됩니다.
로터 전기 결함:
가장 일반적인 산업용 모터는 AC 다람쥐 케이지 유도 회전자입니다. 이 로터는 로터 바를 전도체로 사용하여 로터에 자기장을 생성합니다. 로터 철 또는 코어의 모양은 자기장에 의해 결정됩니다.
편심 로터:
로터 코어 철 또는 엔드 링이 편심되면 로터의 자기장이 왜곡되어 코어 모양이 변형됩니다. 편심 로터를 동심 고정자 내부에 배치하면 로터 자기장과 고정자 자기장 사이에 불균등한 간격이 생깁니다. 그러나 왜곡된 자기장이 로터에 있기 때문에 좁은 간극이 샤프트와 함께 회전합니다. 좁은 간극이 자극 아래에 위치하면 전기적 불균형이 발생합니다. 전기적 불균형은 로터 위치에 따라 변하기 때문에 이 결함을 동적 편심이라고도 합니다.
부러진 로터 바:
다람쥐 케이지 로터에 있는 로터 바의 목적은 로터의 한쪽 끝에서 다른 쪽 끝으로 전류가 흐르는 경로를 제공하기 위한 것입니다. 전류 흐름이 로터에 자기장을 생성합니다. 전류가 한 방향으로 흐르면 북쪽 또는 남쪽 중 한 극성의 자기장을 생성합니다. 이러한 반대 극은 서로 바로 맞은편에 위치하여 균형 잡힌 자기장을 생성합니다.
로터 바 중 하나 이상이 파손된 경우, 로터가 자기장 중 하나 아래에 위치할 때 해당 부분에는 전류가 흐르지 않습니다. 그러나 차단기 양쪽의 막대가 연결되어 있기 때문에 전류가 흐르기 위한 완전한 경로가 있는 경우 이 막대를 통해 전류가 흐르게 됩니다. 이렇게 하면 하나 이상의 막대가 끊어진 위치에 로터에 데드 스팟이 생성됩니다. 이 데드 스팟이 자기장 중 하나 아래에 위치하면 전기적 불균형이 발생합니다. 이러한 전기적 불균형은 로터 시스템에 작용하는 모든 기계적 힘을 결합하여 총 로터 힘을 변화시킵니다.
부러진 막대와 편심 로터는 모두 로터의 기계적 결함이며 로터와 함께 회전합니다. 유도 모터에서 회 전자는 회전하는 자기장의 속도보다 낮은 속도로 회전하므로 기계적 결함은 자기장 아래에서 안팎으로 이동합니다. 결함이 있는 로터가 회전하면 자기장에 대한 파손된 막대의 위치에 따라 로터에 작용하는 전기력이 증가하거나 감소합니다. 이로 인해 전기적 힘과 기계적 힘이 결합되어 변조됩니다. 변조의 주파수는 극의 수에 로터의 슬립 속도를 곱한 값과 같습니다. 이 주파수는 일반적으로 극 통과 주파수(PPF)라고 합니다.
열에 민감한 로터:
일부 AC 유도 모터 로터는 부하에 따라 로터에서 나오는 힘이 변하는 것으로 보입니다. 이는 일반적으로 전류가 흐르고 로터가 증가함에 따라 로터가 구부러지기 때문에 발생합니다. 이러한 현상이 발생하는 이유는 코어 라미네이션이 짧거나 로터 라미네이션의 두께가 균일하지 않거나 주조 로터에 주조 공극이 있기 때문입니다. 위의 경우 로터의 한 쪽이 반대쪽보다 뜨거워져 로터의 더 뜨거운 부분이 늘어나거나 팽창하여 로터가 휘어질 수 있습니다. 로터가 구부러지면 로터가 편심 작동하여 동적 편심으로 나타납니다.
결함이 로터의 자기장에 영향을 미치면 불균형한 힘으로 인해 결합된 로터 힘이 변조됩니다. 이렇게 하면 회전 속도에 따른 기계 진동의 진폭도 변조됩니다. 진폭 변조 신호의 FFT는 기본 주파수 주변에서 측파대를 발생시키며, 이 경우 실행 속도의 1배에 해당합니다. 측파대의 존재는 진폭 변조가 있음을 나타내며, 측파대의 간격은 변조의 주파수를 나타냅니다. 결함이 로터에서 발생하는 경우 사이드밴드는 극 통과 주파수에서 간격을 유지합니다. 위에서 설명한 세 가지 일반적인 로터 결함으로 인해 로터 힘이 변조되기 때문에 각 결함의 FFT는 회전 속도에서 PPF 측 대역의 스펙트럼 피크로 나타납니다.
기계적 결함:
모터의 다른 기계적 결함은 다른 기계와 동일하게 나타납니다. 결함은 주파수 또는 경우에 따라 FFT의 패턴을 기반으로 FFT에서 식별됩니다. 이러한 주파수는 차트나 표에서 얼마든지 얻을 수 있습니다.
전기적 서명 분석(ESA):
전기적 시그니처 분석은 기계가 작동하는 동안 모터 컨트롤러에서 전류와 전압의 세 단계를 모두 측정합니다. 전압과 전류의 세 단계를 모두 측정함으로써 ESA 데이터를 수집할 때마다 모터에 공급되는 전력에 대한 완전한 분석이 수행됩니다. 또한 전압 및 전류 파형에 대해 FFT를 수행합니다.
테스트 및 연구에 따르면 모터 시스템의 많은 기계적 및 전기적 결함으로 인해 모터 전류가 결함 주파수에 따라 변조되는 것으로 나타났습니다.
전력 분석:
전력 분석은 모터와 관련된 문제를 식별할 뿐만 아니라 과도한 고조파 콘텐츠, 전압 불균형, 전압 불일치, 전류 불균형, 모터 시스템의 역률 및 모터 시스템 효율과 같은 유입되는 전력 문제도 식별합니다. 또한 ESA는 전압과 전류의 3상을 모두 동시에 측정하기 때문에 모터의 부하를 매우 정확하게 파악할 수 있습니다. 이를 통해 ESA 소프트웨어는 실제 로터 속도를 정확하게 결정할 수 있으며, 일반적으로 작동 속도는 1RPM 이내로 측정됩니다.
FFT 분석:
전류의 FFT는 MVA 또는 기타 시그니처 분석 기법과 유사하게 모터 시스템의 결함을 식별합니다. 그러나 모터 전압 및 전류 파형 모두에 대해 FFT를 수행하면 MVA 및 MCSA(모터 전류 시그니처 분석)와 비교할 때 추가적인 진단 기능을 제공합니다. MVA와 MCSA는 모두 모터 시스템의 응답만을 측정합니다. 전류 스펙트럼이나 진동 스펙트럼에 큰 스펙트럼 피크가 있는 경우, 이는 수신 전력의 반송파 주파수로 인한 결과이며, 이러한 기술로는 감지할 수 없습니다. 그러나 전압과 전류 모두에 대해 FFT를 수행하면 존재하는 모든 스펙트럼 피크가 들어오는 전력에서 비롯된 것입니다. 그러나 전압 스펙트럼에 전류 스펙트럼에 존재하는 스펙트럼 피크가 없는 경우 모터 또는 구동 기계에서 결함이 발생한 것입니다.
고정자 오류:
ESA의 고정자 오류는 본질적으로 전기적 또는 기계적 오류로 분류됩니다.
고정자 기계적 결함:
고정자 기계적 결함으로 분류되는 결함은 모터 프레임에서 고정자 코어가 느슨해지거나 고정자 슬롯에서 권선이 느슨해지면 발생합니다. 이러한 결함 중 하나는 권선을 변조하기 위해 배치된 고정자 철의 불연속성으로 인해 자기장을 생성합니다. 이러한 주파수는 고정자 슬롯 통과 주파수로 알려져 있으며, 고정자 슬롯 수에 실행 속도를 곱하여 결정됩니다.
당장 치명적이지는 않지만, 느슨해짐이 계속되면 권선 절연이 끊어지거나(느슨해짐으로 인해 권선 절연이 마모되므로) 접지 벽 절연이 끊어져 지락이 발생할 수 있습니다. 이러한 결함 중 하나는 결국 완전한 권선 고장으로 이어지며, 가장 좋은 시나리오는 모터 되감기 또는 모터의 완전한 파손으로 이어집니다. 고장이 발생하는 동안 고정자 철이 손상된 경우, 이 고장은 모터를 완전히 교체해야 합니다. 고정자 슬롯 통과 주파수의 중단은 일반적으로 매우 미미하기 때문에 결함이 매우 진행된 단계가 될 때까지 MVA가 이러한 결함을 포착하지 못합니다. 이러한 결함으로 인해 자기장이 고정자 주위를 회전하면서 느슨한 부품, 고정자 철 또는 권선이 움직이게 되며, 이는 고정자 슬롯 통과 주파수를 둘러싼 라인 주파수 측대역으로 표시됩니다.
고정자 전기:
고정자 권선과 접지 사이의 절연이 끊어지면 권선 결함 또는 접지 결함이 발생합니다. 이러한 결함으로 인해 국부적인 가열과 추가적인 절연 저하가 발생하여 결국 권선이 타서 완전히 파괴되고 심한 경우 내부 층류 절연이 휘거나 타버릴 수 있습니다.
이러한 결함이 발생하면 권선의 약점으로 인해 자기장이 고정자 주위를 회전하면서 고정자 슬롯 통과 주파수가 라인 주파수에서 변조됩니다. 샤프트가 회전함에 따라 추가로 변조되어 라인 주파수 측 대역 주변에 주행 속도 측 대역을 생성합니다.
ESA는 고정자 전기로 분류되는 결함을 식별할 수 있지만, 결함 유형을 확인하려면 모터의 전원을 끈 상태에서 모터 회로 분석을 수행하는 것이 좋습니다.
고정자 슬롯 통과 주파수에서 이러한 변조는 매우 미미하며 생성되는 힘은 매우 작아서 일반적으로 MVA로는 감지할 수 없습니다.
로터 결함:
ESA를 사용하여 감지되는 일반적인 로터 결함은 정적 편심(불균등한 에어 갭), 동적 편심(편심 로터) 및 파손된 로터 바입니다.
스태틱 편심:
로터 코어가 동심이고 자기장 중앙에 있으면 로터 바를 통해 흐르는 전류는 로터의 반대쪽에서 동일하고 극성이 반대입니다. 그러나 로터가 자기장의 중앙에 있지 않으면 고정자에 가장 가까운 로터 바의 자기장 강도가 반대쪽보다 강해집니다. 또한 자극이 고정자 주위를 회전함에 따라 극 중 하나가 좁은 간극을 통과할 때마다 로터 바 주변의 자기장이 변조됩니다. 이렇게 하면 로터 바의 통과 주파수 주변에 라인 주파수 스펙트럼 피크가 두 배로 생성됩니다. 로터 바 통과 빈도는 로터 바의 수에 작동 속도를 곱한 값입니다.
동적 편심도:
로터가 중앙에 있지만 로터 코어가 편심되어 있으면 회전하는 좁은 에어 갭이 발생하여 로터와 에어 갭 안쪽이 좁아집니다. 좁은 에어 갭은 로터 바 통과 주파수 주변에 2배 라인 주파수(2xLF) 측파대를 생성하지만, 좁은 클리어런스가 에어 갭에서 회전하기 때문에 로터 속도에서는 로터 속도에 따라 2xLF 측파대가 변조하게 됩니다. 이렇게 하면 2xLF 측파대 주변에 러닝 스피드 측파대가 생성됩니다.
부러진 로터 바:
로터의 데드 스팟이 자기장 아래를 지나가면 고정자의 자기장과 로터 사이에 인덕턴스가 발생하지 않습니다. 이렇게 하면 모터 전류가 PPF로 변조되어 전류 스펙트럼에서 라인 주파수 주변에 PPF 주파수 측파대가 생성됩니다.
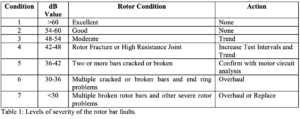
연구에 따르면 로터 바 결함의 심각도는 변조 관계에 따라 결정되며, 7단계의 심각도가 확인되었습니다(표 1 참조).
기계적 결함:
회전하는 장비에 진동을 발생시키는 기계적 결함은 모터에 부하를 주는 것과 같은 역할을 합니다. 베어링 시스템의 고유 진동수와 같은 아주 작은 충격 반응도 ESA를 사용하면 쉽게 감지할 수 있습니다. ESA 스펙트럼에서 기계적 결함은 회선 주파수 측 대역의 중심 주파수로 나타납니다.
데모드 스펙트럼:
ESA는 또한 데모드 저주파 스펙트럼인 Fmax 120Hz를 생성합니다. 디모드 스펙트럼은 캡처된 시간 파형 신호에서 회선 주파수 신호를 제거하는 신호 처리 기법입니다. 처리된 신호에 남는 것은 모터 전류를 변조하는 주파수뿐입니다. 이 공정 신호의 FFT는 불균형, 정렬 불량 등 로터에서 발생하는 결함(모터뿐만 아니라 많은 경우 구동 기계에서도 발생)과 같은 모든 결함 주파수를 매우 명확하게 표시합니다. 정상 전류 스펙트럼에서 일반적으로 라인 주파수 주변의 측 대역으로 나타나는 PPF 및 실행 속도(RS) 피크는 디모드 스펙트럼에서 단일 피크로 나타납니다. 이를 통해 소프트웨어는 데이터가 수집된 시점의 모터 시스템의 실제 RS를 매우 정확하게 결정할 수 있으며, 일반적으로 1RPM 이내의 정확도를 유지합니다. 120Hz 미만의 다른 결함 주파수는 데모드 스펙트럼에서 단일 피크로 나타나며 벨트 결함은 데모드 스펙트럼을 사용하여 매우 쉽게 감지할 수 있습니다.
기타 기계적 결함:
기어 메쉬 문제, 베인 패싱 및 모터 시스템의 어느 곳에나 존재하는 기타 기계적 힘은 고주파 전류 스펙트럼에서 라인 주파수 측 대역 사이의 중심 주파수로 나타납니다.
롤링 요소 베어링 결함:
2단계 베어링 결함은 고주파 전류 스펙트럼에서 주행 속도의 정수가 아닌 배수를 둘러싼 라인 주파수 측 대역으로 매우 명확하게 나타납니다.
ESA의 미래는 어떻게 될까요?
예비 테스트 결과, ESA는 모터 구동 기계를 검사하는 데 사용할 수 있는 가장 강력한 도구 중 하나로 나타났습니다. 기계적 진동과 마찬가지로 결함의 힘이 전체 기계 구조를 움직이기에 충분할 필요가 없기 때문에 거의 모든 경우에 결함은 MVA보다 ESA 데이터에서 훨씬 일찍 나타납니다. 또한 ESA는 모터 시스템에 공급되는 전력의 상태를 파악할 수 있을 뿐만 아니라 모터 효율, 그리고 가장 중요한 데이터가 수집된 시점의 모터의 정확한 작동 속도도 파악할 수 있습니다. 모터 시스템의 대부분의 결함은 속도에 따라 달라지며 정확한 스펙트럼 분석을 위해서는 주행 속도를 정확하게 파악하는 것이 중요하기 때문에 이 측정은 ESA 및 MVA를 사용할 때 매우 중요합니다.
주파수 응답:
ESA는 모터 전류의 변화를 결함 식별자로 사용하기 때문에 매우 낮은 주파수 및 매우 높은 주파수 결함도 감지할 수 있습니다. MVA는 측정 유형(상대 또는 절대) 및 센서의 주파수 응답에 따라 제한이 있습니다.
딥웰 수직 펌프:
수직 펌프에 대한 경험에 따르면 펌프의 고장은 모터에 전달되지 않습니다. 펌프에서 무슨 일이 일어나고 있는지 확인하려면 펌프 자체에 트랜스듀서를 배치해야 합니다. 펌프 결함은 일반적으로 펌프가 완전히 파손될 때까지 모터에서 감지되지 않습니다. 예비 테스트 결과, 펌프의 소량의 캐비테이션과 베인 통과 주파수까지 ESA를 사용하여 쉽게 감지할 수 있는 것으로 나타났습니다. 동시에 촬영한 MVA 스펙트럼에서는 두 가지 결함의 증거가 발견되지 않았습니다.
가변 주파수 드라이브:
ESA를 사용하여 VFD로 구동되는 모터를 테스트하면 모터 시스템 결함을 감지할 수 있을 뿐만 아니라 드라이브의 노후 커패시터 및 기타 전기적 문제도 매우 쉽게 파악할 수 있습니다.
전기적 서명 분석 또는 공장에서 모터 시스템 신뢰성을 개선하는 방법에 대한 자세한 내용은 www.alltestpro.com 또는 이메일 [email protected] 을 참조하세요.


온라인 월드 클래스 모터 진단 세미나 – 레벨 1 – 6월 12일~16일
당신은 들었습니다? 6월 12일-16일 에 World Class Motor Diagnostic Seminar Level 1을 개최합니다. 이 세미나는 매일 오전 8시(EST) 에 시작하는 온라인/가상 세미나 입니다. 이것은 감독자와 기술자가 유지 보수 및 신뢰성 […]

Preconlub 2023년 6월 15-16일 레온, 멕시코
Preconlub 2023에서 발표하는 ATP의 LATAM 지역 관리자 Gloria Urizar와 함께하세요! 자세한 내용은: https://www.preconlub.com/ 글로리아 우리자르 지역 관리자 – 라틴 아메리카