แนวทางการทดสอบเครื่องจักรแบบหมุน
1. Overview
1.1 Scope
This document describes guidelines for evaluating the armature of rotating devices and field windings rated at 1 horsepower (746 watts) and above for winding short circuits, phase imbalance, and rotor impedance. It applies to inductors and transformers.
This document describes typical static coil circuit analysis measurements and how these measurements indicate the condition of the machine, providing guidance on the limits of circuit measurements.
The types of measurements examined are those performed by individuals or groups of instruments that provide basic coil circuit measurements such as resistance, impedance, inductance, capacitance, and specialized test measurements. It is accepted that the measurement techniques must include (Reference: IEEE Std 120-1989):
a) Measuring DC resistance requires a DC current value.
b) Measurements of alternating current, such as inductance and impedance, must be performed using alternating current and sine wave measurements as selected by the instrument manufacturer.
c) All measurements must be evaluated through a bridge circuit and reported within the scope of that bridge. Standard engineering units of measurement, such as inductance and impedance, do not need to be calculated, except where the values are expressed as ratios, degrees, or percentages.
While these preliminary guidelines are outlining, the output voltages for all tests except ground wall insulation measurements are within the electronic range and typically below 10 volts AC/DC. The standard output frequency for these instruments generally ranges above 100 Hz as well. If the instruments are developed using acoustic engineering principles that exceed these values, or if additional values provide accurate motor circuit visualization, those may be included within the scope of these guidelines.
1.2 Objectives
วัตถุประสงค์ของแนวทางนี้คือเพื่อสรุปวิธีการและข้อมูลทั่วไปที่รวบรวมโดยใช้การวิเคราะห์วงจรขดลวด และเพื่อเป็นแนวทางในการตีความผลลัพธ์สำหรับฉนวนระหว่างทางเลี้ยว ฉนวนผนังกราวด์ และการประเมินโรเตอร์กรงกระรอก วิธีการวัดฉนวนผนังกราวด์และผลการทดสอบจะต้องอ้างอิงการปรับปรุงปัจจุบันของมาตรฐาน IEEE 43, “แนวทางปฏิบัติที่แนะนำของ IEEE สำหรับการทดสอบความต้านทานฉนวนของเครื่องจักรที่กำลังหมุน”
ก) แนะนำให้รวมผลการทดสอบที่สม่ำเสมอซึ่งสามารถใช้ในการประเมินสภาพของเครื่องจักรที่กำลังหมุนและหม้อแปลงไฟฟ้า
b) จัดให้มีแนวทางทั่วไปสำหรับวิธีการอ่านค่าวงจรโรเตอร์เหนี่ยวนำและการตีความผลลัพธ์
ค) กำหนดประเภทของการวัดที่ใช้ในการกำหนดประเภทของฉนวนระหว่างการเลี้ยว ฉนวนผนังกราวด์ และความผิดปกติของเครื่องจักรที่กำลังหมุนอื่นๆ
2. ข้อมูลอ้างอิง
ต่อไปนี้เป็นข้อมูลอ้างอิงที่เกี่ยวข้องกับมาตรฐานนี้
ก) IEEE Std 43-2000: แนวปฏิบัติที่แนะนำของ IEEE สำหรับการทดสอบความต้านทานฉนวนของเครื่องจักรที่กำลังหมุน
b) IEEE Std 56-1977: คู่มือ IEEE สำหรับการบำรุงรักษาฉนวนของเครื่องจักรหมุนกระแสสลับขนาดใหญ่ (10,000 kVA และใหญ่กว่า)
c) IEEE Std 118 ñ 1978: รหัสทดสอบมาตรฐาน IEEE สำหรับการวัดความต้านทาน
d) IEEE Std 120-1989: คู่มือการทดสอบหลัก IEEE สำหรับการวัดทางไฟฟ้าในวงจรไฟฟ้า
e) IEEE Std 388 ñ 1992: มาตรฐาน IEEE สำหรับหม้อแปลงและตัวเหนี่ยวนำในอุปกรณ์แปลงพลังงานอิเล็กทรอนิกส์
f) IEEE Std 389 – 1996: แนวทางปฏิบัติที่แนะนำของ IEEE สำหรับการทดสอบหม้อแปลงไฟฟ้าและตัวเหนี่ยวนำ
g) IEEE Std 1068 ñ 1990: แนวทางปฏิบัติที่แนะนำของ IEEE สำหรับการซ่อมแซมและการกรอกลับมอเตอร์สำหรับอุตสาหกรรมปิโตรเลียมและเคมี
3. ข้อพิจารณาด้านความปลอดภัย
คำว่า ‘การวิเคราะห์วงจรขดลวดคงที่’ หมายถึงวิธีทดสอบที่ดำเนินการกับอุปกรณ์ที่ไม่ได้รับพลังงาน เครื่องมือที่ใช้ต้องเป็นไปตามการรับรองที่ได้รับการยอมรับ เช่น UL, CE, CSA หรือเทียบเท่า ไม่สามารถครอบคลุมประเด็นด้านความปลอดภัยทั้งหมดได้ในแนวปฏิบัตินี้ เจ้าหน้าที่ทดสอบควรศึกษาคู่มือการใช้งานของผู้ผลิต สหภาพแรงงาน บริษัท และข้อบังคับของรัฐบาล
4. ทฤษฎีทั่วไปการวิเคราะห์วงจรขดลวด
4.1 วงจรแม่เหล็ก
ขดลวดไฟฟ้าและเครื่องจักรประกอบด้วยวงจรแม่เหล็กไฟฟ้าควบคู่กัน วงจรแม่เหล็กได้รับการพัฒนาขึ้นจากกระแสไฟฟ้าที่ไหลผ่านตัวนำและถูกนำทางผ่านวัสดุแม่เหล็ก
ขั้นแรก ให้พิจารณาตัวนำที่มีความยาว l วางอยู่ในมุมฉากกับขั้วของแม่เหล็กขณะแบกกระแส I ผลลัพธ์ที่ได้คือแรงระดับ F โดยที่ B คือขนาดของความหนาแน่นฟลักซ์แม่เหล็ก (ในเทสลาหรือ T) และฟลักซ์แม่เหล็กคือการวัดความแรงของสนามแม่เหล็ก พบสูตรผลลัพธ์ดังนี้:
สูตร 1: แรง (นิวตัน)
ฉ = บีไอ ล
ขึ้นอยู่กับตำแหน่งที่กำหนดของตัวนำโดยที่ l เป็นเวกเตอร์ที่มีขนาด l ในทิศทางของกระแส
สูตร 2: บังคับด้วยตำแหน่งตัวนำโดยพลการ
F = อิล x บี
สมมติว่า B มีขนาดคงที่กับพื้นที่ A:
สูตร 3: ฟลักซ์แม่เหล็ก (Φ, เว็บเบอร์)
Φ = BA หรือ B = Φ/A
B แสดงเป็น Webber(Wb)/m
ความสัมพันธ์ระหว่าง I และ B มีดังนี้:
สูตร 4: กฎวงจรของแอมแปร์
A/m *d*l = ฉัน
โดยที่ A/m คือความเข้มของสนามแม่เหล็ก H
เมื่อวงจรปิดถูกส่งผ่านด้วยกระแส N ครั้ง เช่น ในขดลวด ผลลัพธ์ของแรงแม่เหล็ก (mmf หรือ ℑ) จะเป็นดังนี้:
สูตร 5: MMF
ℑ = NI
NI เรียกอีกอย่างว่า กระแสแอมแปร์ (At) N ของหนึ่งจะเรียกว่าหนึ่ง ëturn.í
ตัวเหนี่ยวนำ (L) หมายถึงการเชื่อมโยงฟลักซ์ต่อหน่วยกระแสที่แสดงเป็นหน่วยของเฮนรี่ (H) 1
สูตร 6: ตัวเหนี่ยวนำ
L = (NΦ)/I
สำหรับแผลแบบทอรอยด์ที่มีขดลวดที่แตกต่างกัน ëní อาจนิยามความเหนี่ยวนำได้:
สูตร 7: ทุ่ง Toroid1
Lpq = (Np(kpqΦq))/iq
พลังงานที่สะสมอยู่ในตัวเหนี่ยวนำสามารถคำนวณได้ โดยมีกระแส (i):
สูตร 8: พลังงานอุปนัย
W = (1/2)หลี่ 2
ความถี่ส่งผลกระทบต่อสนามภายในตัวนำ เมื่อความถี่ที่ใช้เพิ่มขึ้น กระแสและสนามผลลัพธ์จะเคลื่อนที่เข้าใกล้พื้นผิวของตัวนำมากขึ้น (เอฟเฟกต์ผิวหนัง) “นี่เป็นเพราะความจริงที่ว่ามีแรงเคลื่อนไฟฟ้าเหนี่ยวนำในตัวนำซึ่งมีฟลักซ์สลับกัน แรงเคลื่อนไฟฟ้าเหล่านี้อยู่ที่ศูนย์กลางมากกว่าที่เส้นรอบวง ดังนั้นความต่างศักย์มีแนวโน้มที่จะสร้างกระแสที่ตรงข้ามกับกระแสที่ศูนย์กลางและช่วยเหลือที่เส้นรอบวง ดังนั้นกระแสไฟฟ้าจึงถูกบังคับให้ไหลออกด้านนอกตัวนำ ทำให้พื้นที่ที่มีประสิทธิภาพของตัวนำลดลง
1 เครื่องจักรไฟฟ้าและกลไฟฟ้า, Syed A Nasar, ซีรี่ส์โครงร่างของSchaum, 1981
คู่มือมาตรฐานสำหรับวิศวกรไฟฟ้า 2 เล่ม ฉบับที่ 14, Donald G Fink, Wayne Beaty, McGraw Hill, 2000
4.2 ระบบฉนวน
“ฉนวนไฟฟ้าคือตัวกลางหรือวัสดุซึ่งเมื่อวางระหว่างตัวนำที่มีศักย์ไฟฟ้าต่างกัน จะยอมให้มีกระแสไฟฟ้าเพียงเล็กน้อยในเฟสพร้อมกับแรงดันไฟฟ้าที่ใช้ให้ไหลผ่านได้ คำว่าไดอิเล็กทริกแทบจะมีความหมายเหมือนกันกับฉนวนไฟฟ้า ซึ่งถือได้ว่าเป็นฉนวนไฟฟ้า อิเล็กทริกที่ใช้ อิเล็กทริกที่สมบูรณ์แบบไม่ผ่านกระแสการนำไฟฟ้าและมีเพียงกระแสประจุไฟฟ้าแบบคาปาซิทีฟระหว่างตัวนำเท่านั้น”2 (ดู IEEE Std 120-1989 หัวข้อ 5.4.2 ด้วย)
การแสดงวงจรที่ง่ายที่สุดของอิเล็กทริกคือตัวต้านทานและตัวเก็บประจุแบบขนาน ความจุไฟฟ้าระหว่างตัวนำ (ในสุญญากาศ) คือ 0.0884 x 10-12 A/t โดยที่ A คือพื้นที่ของตัวนำเป็นตารางเซนติเมตร และ t คือระยะห่างของตัวนำเป็นเซนติเมตร “เมื่อวัสดุอิเล็กทริกเติมปริมาตรระหว่างอิเล็กโทรด ความจุไฟฟ้าจะสูงขึ้นโดยอาศัยประจุภายในโมเลกุลและอะตอมของวัสดุ ซึ่งดึงดูดประจุไปยังระนาบตัวเก็บประจุมากขึ้นด้วยแรงดันไฟฟ้าที่ใช้เท่ากัน ความจุไฟฟ้าที่มีอิเล็กทริกระหว่าง อิเล็กโทรดคือ: “3
สูตร 9: ความจุระหว่างตัวนำไฟฟ้าแบบวงกลมขนาน
C = (2π∈í∈oL)/cosh-1(D/2r)
สภาพอนุญาตของระบบฉนวนจะลดลง (บริเวณการกระจายตัว) โดยมีความถี่ที่ใช้เพิ่มขึ้น เช่นเดียวกับโพลาไรเซชันของอินเทอร์เฟซไอออนิกและโพลาไรเซชันไดโพลาร์ของโมเลกุล ในโพลีเมอร์ การกระจายตัวของไดโพลาร์จะเกิดขึ้นที่ความถี่ต่ำมาก
4.3 การแยกย่อยของฉนวน
การพังทลายของฉนวน เรียกว่า “ความผิดพลาด” ภายในแนวทางปฏิบัตินี้ ซึ่งรวมถึงการปนเปื้อน การติดตามส่วนโค้ง การเสื่อมสภาพจากความร้อน และความผิดพลาดทางกล ข้อผิดพลาดแต่ละประเภทมีปัจจัยร่วมกัน: การเปลี่ยนแปลงคุณสมบัติความต้านทานและความจุของฉนวนไฟฟ้า
การปนเปื้อน โดยเฉพาะอย่างยิ่งการซึมผ่านของน้ำ จะทำให้ค่าการนำไฟฟ้าของฉนวนเพิ่มขึ้น น้ำมีแนวโน้มที่จะสะสมในรอยแตกร้าวของฉนวนและการรวมภายในระบบฉนวน สนามไฟฟ้าทำให้เกิดการเปลี่ยนแปลงต่อสิ่งปนเปื้อน รวมถึงการขยายตัว ซึ่งทำให้ระบบฉนวนพังทลายลงไปอีก สิ่งปนเปื้อนอื่นๆ รวมถึงก๊าซ ไอระเหย ฝุ่น ฯลฯ สามารถโจมตีองค์ประกอบทางเคมีของระบบฉนวนได้ เมื่อระบบฉนวนเชื่อมเสร็จสมบูรณ์แล้ว ระบบจะถือว่าลัดวงจร โดยปกติสิ่งนี้จะเกิดขึ้นก่อนระหว่างตัวนำ โดยที่ระบบฉนวนมีจุดอ่อนที่สุด พื้นที่ข้อบกพร่องที่สำคัญ ได้แก่ ส่วนที่ไม่ยึดแน่นของขดลวด เช่น จุดสิ้นสุดของการหมุนของเครื่องจักรที่กำลังหมุน (ซึ่งเป็นจุดความเครียดทางไฟฟ้าสูงสุดของขดลวด) และจุดความเค้นเชิงกลสูงสุด เช่น จุดที่ขดลวด ปล่อยช่องไว้บนเครื่องที่หมุนอยู่
การติดตามส่วนโค้งของระบบฉนวนเกิดขึ้นเมื่อกระแสสูงไหลผ่านระหว่างตัวนำผ่านพื้นผิวของระบบฉนวน ฉนวนที่จุดเหล่านั้นจะเกิดคาร์บอไนซ์ โดยเปลี่ยนส่วนประกอบคาปาซิทีฟและตัวต้านทานของระบบฉนวนไฟฟ้า การติดตามส่วนโค้งมักเป็นผลมาจาก: ความเค้นทางไฟฟ้าที่รุนแรง การปนเปื้อน; หรือทั้งคู่. ข้อผิดพลาดประเภทนี้ส่วนใหญ่เกิดขึ้นระหว่างตัวนำหรือขดลวด และโดยปกติจะจบลงด้วยการลัดวงจร
การเสื่อมสภาพเนื่องจากความร้อนของระบบฉนวนเกิดขึ้นเมื่อระบบฉนวนไฟฟ้าเสื่อมสภาพอันเป็นผลมาจากสมการเคมีของอาร์เรเนียส กฎง่ายๆ ที่ยอมรับโดยทั่วไปคืออายุความร้อนของระบบฉนวนจะลดลงครึ่งหนึ่งเมื่ออุณหภูมิในการทำงานเพิ่มขึ้นทุกๆ 10o C ฉนวนจะสลายตัวอย่างรวดเร็วและเป็นคาร์บอนเมื่อถึงขีดจำกัดอุณหภูมิสำหรับระบบฉนวน
ปัจจัยด้านสิ่งแวดล้อมอื่นๆ ยังส่งผลต่ออายุการใช้งานทางความร้อนของระบบฉนวนด้วย เช่น: การปนเปื้อนของขดลวด; ความชื้น; กระแสไฟฟ้า; และความเครียดทางไฟฟ้าอื่นๆ
ข้อผิดพลาดทางกลในระบบฉนวนไฟฟ้า ได้แก่ การแตกร้าวจากความเค้น การสั่นสะเทือน การบุกรุกทางกล และความผิดปกติทางกล แรงภายในขดลวดระหว่างการทำงานต่างๆ จะทำให้เกิดการเคลื่อนที่ทางกลและอาจสิ้นสุดในการแตกหักของวัสดุฉนวน การสั่นสะเทือนทางไฟฟ้าและทางกลทำให้เกิดความเครียดเกินควรต่อระบบฉนวน ส่งผลให้เกิดการแตกหักของความเครียดและการหลวมของระบบฉนวน การบุกรุกทางกลรวมถึงการเคลื่อนตัวของวัสดุเข้าสู่ระบบฉนวนระหว่างตัวนำและ/หรือระบบฉนวนลงดิน ข้อผิดพลาดทางกลไกรวมถึงความล้มเหลว เช่น ข้อบกพร่องของตลับลูกปืน ในเครื่องจักรที่กำลังหมุน ซึ่งทำให้ตลับลูกปืนแยกออกจากกันและทะลุผ่านส่วนประกอบที่เคลื่อนไหวของระบบ ฟอลต์เหล่านี้อาจสิ้นสุดเนื่องจากการลัดวงจรระหว่างตัวนำ คอยล์ หรือคอยล์ลงดิน
4.4 ขั้นตอนของความล้มเหลวของฉนวนที่คดเคี้ยว
สาเหตุหลักของความล้มเหลวของขดลวดได้แก่: การพังทลายของฉนวน (ความร้อน); การปนเปื้อน; การบุกรุกของความชื้น ชั่วคราว; และความเครียดทางกล และประการแรกส่งผลให้เกิดการพังทลายของฉนวนระหว่างตัวนำภายในขดลวดเดียวกัน ระหว่างขดลวดในเฟสเดียวกัน หรือระหว่างขดลวดที่มีเฟสแยกกัน การม้วนแบบสั้นเหล่านี้อาจจบลงที่ข้อผิดพลาดด้านความต้านทานของฉนวนแต่ไม่เสมอไปเมื่อการม้วนล้มเหลวจริง ๆ การตรวจจับการเปลี่ยนแปลงระหว่างตัวนำทำให้มีโอกาสมากขึ้นในการซ่อมแซมหรือเปลี่ยนก่อนเวลาก่อนที่อุปกรณ์จะหยุดทำงาน โปรดทราบว่าอัตราความผิดปกติจะขึ้นอยู่กับความรุนแรงของความผิดปกติ (เช่น อัตราส่วนการหมุน) และศักยภาพระหว่างตัวนำ (เช่น ข้อบกพร่องอาจมีแนวโน้มในอุปกรณ์ที่ต่ำกว่า 600 Vac และจะเกิดความล้มเหลวอย่างรวดเร็วในระบบที่มีแรงดันไฟฟ้าเกิน 1,000 Vac
ขั้นตอนทั่วไปของความผิดปกติของขดลวดระหว่างตัวนำมีดังนี้:
• ขั้นที่ 1: ฉนวนระหว่างตัวนำเกิดความเค้น ทำให้เกิดการเปลี่ยนแปลงค่าความต้านทานและตัวเก็บประจุของฉนวนที่จุดฟอลต์ อุณหภูมิสูงและข้อผิดพลาดที่เกิดปฏิกิริยาที่คล้ายกันส่งผลให้เกิดคาร์บอนไดออกไซด์ของฉนวน (ไดอิเล็กทริก) ที่จุดนั้น คาร์บอไนซ์อาจเกิดขึ้นเนื่องจากการติดตามทั่วทั้งระบบฉนวน
• ขั้นที่ 2: จุดที่เกิดความผิดปกติจะมีความต้านทานมากขึ้น การเหนี่ยวนำร่วมกันเกิดขึ้นระหว่างส่วน ëgoodí ของขดลวด (และส่วนประกอบที่รับกระแสไฟฟ้าอื่น ๆ ของระบบ) และรอบการลัดวงจร การสูญเสีย I2 R จะเพิ่มขึ้น ณ จุดที่เกิดฟอลต์ เนื่องจากกระแสที่เพิ่มขึ้นภายในรอบการลัดวงจร ทำให้อุณหภูมิ ณ จุดนั้นเพิ่มขึ้น และทำให้ระบบฉนวนเกิดคาร์บอไนซ์อย่างรวดเร็ว มอเตอร์อาจเริ่มสะดุด ณ จุดนี้ แม้ว่าอาจสามารถทำงานได้หลังจากช่วงระบายความร้อนสั้นๆ ก็ตาม
• ขั้นที่ 3: ฉนวนแตกตัวและพลังงานภายในจุดที่ลัดวงจรอาจทำให้เกิดการแตกร้าวของระบบฉนวนและการระเหยของขดลวดได้
4.5 การเปรียบเทียบอุปกรณ์
เครื่องจักรและหม้อแปลงที่หมุนได้ทำงานเนื่องจากหลักการที่คล้ายคลึงกัน ตัวอย่างเช่น มอเตอร์เหนี่ยวนำสามเฟสมีวงจรหลัก (ขดลวดสเตเตอร์) และวงจรทุติยภูมิ (ขดลวดโรเตอร์) เช่นเดียวกับขดลวดปฐมภูมิและขดลวดทุติยภูมิของหม้อแปลง ข้อแตกต่างคือพลังงานไฟฟ้าถูกแปลงเป็นค่าพลังงานไฟฟ้าที่แตกต่างกันด้วยหม้อแปลงไฟฟ้า พลังงานไฟฟ้าเดียวกันจะถูกแปลงเป็นพลังงานกลโดยใช้มอเตอร์ไฟฟ้า
ขดลวดหม้อแปลงได้รับการออกแบบเพื่อให้โดยทั่วไปมีความสมดุลระหว่างเฟส ซึ่งจะช่วยให้พลังงานที่สมดุลบนอิมพีแดนซ์ของวงจรทุติยภูมิและสมดุลทั่วทั้งระบบ เครื่องจักรหมุนสามเฟส (ประกอบแล้ว) มีการเปลี่ยนแปลงความเหนี่ยวนำร่วมเมื่อตำแหน่งของโรเตอร์เปลี่ยนไป ผลลัพธ์อาจเป็นความไม่สมดุลแบบเหนี่ยวนำที่ทดสอบ และส่งผลให้อิมพีแดนซ์ไม่สมดุล โดยโรเตอร์อยู่ในตำแหน่งเดียวในขณะที่ทั้งสามเฟสถูกทดสอบ ความไม่สมดุลของขดลวดเครื่องจักรที่กำลังหมุนสามารถประเมินได้โดยการชดเชยตำแหน่งโรเตอร์หรือโดยการเปรียบเทียบการอ่านค่าอิมพีแดนซ์และความเหนี่ยวนำ
4.6 การทดสอบการวัดเพื่อการประเมินผล
การวัดทางไฟฟ้าขั้นพื้นฐานสำหรับการประเมินขดลวดของหม้อแปลงและการหมุนของเครื่องจักรประกอบด้วย:
ก) ความต้านทาน (IEEE Std 118-1978, IEEE Std 389-1996) ñ ใช้สำหรับตรวจจับความแปรผันของขนาดสายไฟ การเชื่อมต่อ และวงจรความต้านทานเปิด/สูง
b) ตัวเหนี่ยวนำ (IEEE Std 388-1992: ส่วนที่ 5.2 ตัวเหนี่ยวนำ (อิมพีแดนซ์) ความไม่สมดุล, 5.6.1 วิธีการวัดตัวเหนี่ยวนำสะพาน, IEEE Std 120-1989) ตัวเหนี่ยวนำเป็นฟังก์ชันของเรขาคณิตและการซึมผ่าน ไม่ขึ้นกับแรงดัน กระแส และความถี่ การเหนี่ยวนำโดยรวมที่วัดได้คือการรวมกันของการเหนี่ยวนำร่วมกันและการเหนี่ยวนำภายในของวงจร ที่เรียกว่าการเหนี่ยวนำวงจร การตรวจจับข้อผิดพลาดสามารถทำได้ในการม้วนขดลวดเมื่อความจุของระบบฉนวนอิเล็กทริกกลายเป็นความต้านทานและมีไฟฟ้าลัดวงจร ส่งผลให้เกิดการเหนี่ยวนำร่วมกันระหว่างส่วนที่ “ดี” ของขดลวดและการหมุนที่ลัดวงจร การเหนี่ยวนำร่วมยังใช้ในการประเมินขดลวดโรเตอร์ในเครื่องจักรหมุนด้วย
c) ความจุไฟฟ้า (IEEE Std 389-1996, IEEE Std 120-1989) ñ ใช้สำหรับวัดความจุไฟฟ้าวงจรโดยรวมและความจุฉนวนผนังกราวด์ ปกติจะมีแนวโน้มตามกาลเวลา
d) อิมพีแดนซ์ (IEEE Std 388-1992: Section 5.2 Inductance (Impedance) Unbalance, IEEE Std 389-1996: Section 8.3 Impedance Unbalance, 8.4 Balance Tests, IEEE Std 120-1989: Section 5 Impedance Measurings) ñ อิมพีแดนซ์คือความถี่ ความต้านทาน ขึ้นอยู่กับความเหนี่ยวนำและความจุ ความต้านทานมีผลกระทบค่อนข้างน้อยต่ออิมพีแดนซ์โดยรวม และความถี่ที่ใช้ส่งผลต่อส่วนประกอบรีแอกแตนซ์แบบเหนี่ยวนำและแบบคาปาซิทีฟ การเหนี่ยวนำที่เพิ่มขึ้นจะมีผลบวกต่อค่าอิมพีแดนซ์ ในขณะที่ความจุจะส่งผลผกผันกับอิมพีแดนซ์ของวงจร ตัวอย่างเช่น การเพิ่มขึ้นของค่าความเหนี่ยวนำของวงจรโดยรวมจะสร้างอิมพีแดนซ์เพิ่มขึ้นแบบขนานโดยประมาณ การเพิ่มค่าความจุของวงจรโดยรวมจะทำให้อิมพีแดนซ์ลดลง
e) มุมเฟส (IEEE Std 120-1989) ñ มุมเฟสของวงจรคือการวัดเวลาหน่วงระหว่างแรงดันและกระแสที่แสดงเป็นระดับการแยก โดยจะได้รับผลกระทบโดยตรงจากอิมพีแดนซ์ของวงจร แรงดันไฟฟ้า และความถี่ที่ใช้
f) การทดสอบการตอบสนองความถี่ (IEEE Std 389-1996: ส่วน 11.1 การตอบสนองความถี่ของหม้อแปลงไฟฟ้า) การทดสอบการตอบสนองความถี่สามารถประเมินได้โดยใช้หลายวิธี เพื่อวัตถุประสงค์ของแนวทางนี้ การประเมินจะแสดงเป็นเปอร์เซ็นต์การลดลงของกระแสของคอยล์เมื่อความถี่เพิ่มขึ้นเป็นสองเท่า หรือที่เรียกว่าการทดสอบการตอบสนองกระแส/ความถี่ การตอบสนองกระแส/ความถี่ได้รับผลกระทบจากการเปลี่ยนแปลงความจุของวงจรเมื่อความถี่เพิ่มขึ้น
g) การทดสอบความต้านทานของฉนวน ñ ครอบคลุมภายใต้ IEEE Std 43-2000
วัตถุประสงค์หลักคือเพื่อระบุความไม่สมดุลระหว่างขดลวดที่คล้ายกัน เช่น ระหว่างเฟสในเครื่องหมุนสามเฟสหรือหม้อแปลงสามเฟส โดยไม่คำนึงถึงการวัดที่ให้ไว้
5.0 การประเมินอุปกรณ์
5.1 การประเมินหม้อแปลงสามเฟส
ขณะทำการทดสอบหม้อแปลงสามเฟสโดยใช้เทคนิคการวิเคราะห์ขดลวด วงจรตรงข้ามด้านที่ทดสอบจะต้องลัดวงจรและต่อสายดิน (IEEE Std 388-1992: ส่วน 5.6.1 วิธีการวัดสะพานเหนี่ยวนำ, IEEE Std 389-1996) แต่ละขั้นตอนในสามขั้นตอนได้รับการวัดและประเมินเพื่อความสมดุล ดูตารางที่ 1 สำหรับขีดจำกัดผลการทดสอบที่แนะนำ
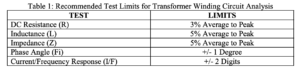
ก) การทดสอบ Fi และ I/F จะตรวจจับการพังทลายของฉนวน – การเปลี่ยนแปลงความจุและความต้านทานของวงจรระบบฉนวน
b) การวัดค่าความเหนี่ยวนำและอิมพีแดนซ์จะตรวจจับข้อบกพร่องของการพันขั้นสูงและข้อบกพร่องของเทิร์นในการผลิตหรือการซ่อมแซม
ค) ความต้านทานใช้ในการตรวจจับการเชื่อมต่อที่หลวม ตัวนำที่ขาด และปัญหาที่เกี่ยวข้อง
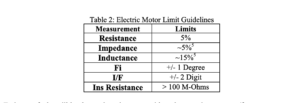
5.2 การประเมินเครื่องจักรหมุนเหนี่ยวนําสามเฟส
สเตเตอร์และโรเตอร์ได้รับการประเมินแยกกันโดยใช้เทคนิคการวิเคราะห์วงจรขดลวด หลักเกณฑ์ต่อไปนี้จะครอบคลุมทั้งสองกรณี
5.2.1 การทดสอบโรเตอร์มอเตอร์แบบประกอบ
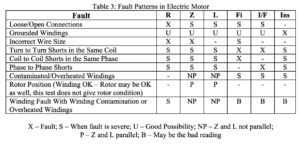
ประเภทของข้อผิดพลาดทั่วไปในโรเตอร์ของมอเตอร์ไฟฟ้าคือ:
ก) ช่องว่างอากาศ (ความเยื้องศูนย์กลางของโรเตอร์): ซึ่งโดยปกติไม่ถือเป็นความล้มเหลวแบบก้าวหน้า เว้นแต่จะมีการหลวมในโรเตอร์ หรือมีความผิดปกติภายในเพลามอเตอร์หรือแบริ่งที่รุนแรง ปัญหาการหลวม แบริ่ง และเพลามอเตอร์สามารถตรวจพบได้เร็วและปลอดภัยยิ่งขึ้น โดยใช้เทคนิคการวิเคราะห์การสั่นสะเทือน ปัญหาช่องว่างอากาศในการผลิตและการซ่อมแซมสามารถตรวจพบได้ด้วยการวิเคราะห์วงจรขดลวดคงที่ระหว่างการทดสอบการยอมรับหรือที่ร้านค้าของผู้ผลิต/ร้านซ่อมก่อนที่จะเสียเวลาในการติดตั้งอุปกรณ์ การทดสอบการยอมรับประเภทนี้ใช้เพื่อตรวจสอบว่ามีการตั้งค่าช่องว่างอากาศอย่างถูกต้องหรือไม่ (+/- 10% ของการอ่านค่าช่องว่างอากาศโดยเฉลี่ยที่ปลายด้านใดด้านหนึ่งของโรเตอร์ระหว่างการติดตั้ง)4
b) Casting Voids และ Rotor Bar Connections: ซึ่งอาจคืบหน้าไปสู่ความผิดปกติของโรเตอร์ barí เมื่อเวลาผ่านไป มักจะมีช่องว่างในการหล่อในโรเตอร์อะลูมิเนียมหล่อ การแปรผันของโลหะผสมอะลูมิเนียม และการเปลี่ยนแปลงข้อต่อของแท่งโลหะผสมทองแดงที่จะส่งผลต่อการเหนี่ยวนำ ข้อผิดพลาดสามารถตรวจพบได้โดยการอ่านค่าความเหนี่ยวนำของวงจรหรืออิมพีแดนซ์เป็นชุดในขณะที่เพลาหมุน 360 องศา การอ่านเหล่านี้สามารถเขียนกราฟเป็นรูปคลื่นและดูความผิดปกติได้โดยการดูที่ตำแหน่งของตัวเหนี่ยวนำและ/หรือการเปลี่ยนแปลงอิมพีแดนซ์ของรูปคลื่น การเปลี่ยนแปลงเล็กน้อยบนความลาดเอียงหรือความชันของรูปคลื่นบ่งชี้ว่ามีข้อบกพร่องเล็กน้อยซึ่งมักจะไม่ก้าวก่าย ในขณะที่การเปลี่ยนแปลงที่สำคัญที่จุดสูงสุดของรูปคลื่นบ่งชี้ถึงความผิดปกติของโรเตอร์อย่างรุนแรง ข้อผิดพลาดร้ายแรงอาจรบกวนลักษณะการทำงานของมอเตอร์
ค) แถบโรเตอร์หัก: เป็นความผิดปกติแบบก้าวหน้าซึ่งปกติเกิดขึ้นเนื่องจากการทำงานของมอเตอร์ไฟฟ้าไม่ถูกต้อง เมื่อสตาร์ทมอเตอร์ไฟฟ้า ความร้อนจะสะสมในโรเตอร์เนื่องจากมีกระแสสูงและความถี่สูง ซึ่งต้องใช้เวลาทำให้เย็นลง ในกรณีอื่นๆ โรเตอร์อาจหยุดทำงาน ทำให้เกิดกระแสสูงและความถี่โรเตอร์สูง อัตราการขยายตัวของโลหะผสมทองแดง (หรืออะลูมิเนียม) และวัสดุโรเตอร์จะแตกต่างกัน ทำให้เกิดความเค้นทางกลกับแท่งโลหะเอง ภายใต้ความเครียดที่รุนแรง แท่งโรเตอร์อาจแตก ส่งผลให้ความสามารถของมอเตอร์ในการสร้างแรงบิดลดลง เมื่อแท่งโรเตอร์แตกหัก แท่งโรเตอร์ที่อยู่รอบๆ จะจ่ายกระแสไฟเพิ่มเติม ส่งผลให้อุณหภูมิของแท่งโรเตอร์เพิ่มขึ้นอีก และอาจเกิดรอยแตกเพิ่มเติมได้
ความสามารถของอุปกรณ์ทดสอบในการตรวจจับความผิดปกติผ่านการเหนี่ยวนำและอิมพีแดนซ์เกิดจากการเปลี่ยนแปลงในการเหนี่ยวนำร่วมของวงจรเมื่อตำแหน่งของโรเตอร์เปลี่ยนไป เนื่องจากมอเตอร์ไฟฟ้าเป็นหม้อแปลงไฟฟ้าที่มีวงจรทุติยภูมิหมุนอยู่ เมื่อตำแหน่งของโรเตอร์เปลี่ยนอัตราส่วนระหว่างขดลวดสเตเตอร์ที่มีประสิทธิผล (ขดลวดสเตเตอร์) กับทุติยภูมิ (ขดลวดโรเตอร์) การเปลี่ยนแปลง และการเหนี่ยวนำร่วมโดยรวมและอิมพีแดนซ์ของวงจรที่ตามมาจะเปลี่ยนไป เนื่องจากธรรมชาติของอุปกรณ์ที่หมุน การเปลี่ยนแปลงเมื่อเวลาผ่านไปจะเป็นแบบไซน์ซอยด์ (หรือการเปลี่ยนแปลงบางอย่าง) และสมมาตร
กระบวนการทั่วไปในการดำเนินการทดสอบความเหนี่ยวนำหรืออิมพีแดนซ์ของโรเตอร์คือการอ่านค่าความเหนี่ยวนำหรืออิมพีแดนซ์โดยเพิ่มขึ้นทีละ 360 องศา หรือโดยใช้การทดสอบตามความเหนี่ยวนำหรืออิมพีแดนซ์แบบเรียลไทม์ ผลการทดสอบควรมีกราฟเพื่อการตีความ
5.2.2 การทดสอบสเตเตอร์ของอุปกรณ์หมุนแบบประกอบ
การประเมินผลการทดสอบอุปกรณ์หมุนที่ประกอบเข้าด้วยกันจะให้ความแม่นยำในการตรวจจับข้อบกพร่องในระดับที่แตกต่างกัน ตัวอย่างเช่น ผลการทดสอบการเหนี่ยวนำจะให้ค่าที่สูงและแปรผันเมื่อโรเตอร์ถูกวางในตำแหน่งที่แตกต่างกัน ดังนั้นจึงต้องปรับตำแหน่งของโรเตอร์เพื่อให้ค่าของการเหนี่ยวนำร่วมกันระหว่างขดลวดปฐมภูมิ (สเตเตอร์) และขดลวดทุติยภูมิ (โรเตอร์) ค่อนข้างจะเหมือนกัน อย่างไรก็ตาม ความเหนี่ยวนำควบคู่กับอิมพีแดนซ์แสดงให้เห็นถึงผลกระทบด้านความจุของการพังทลายของฉนวนหรือการปนเปื้อนของขดลวด ตัวอย่างเช่น หากอิมพีแดนซ์และตัวเหนี่ยวนำค่อนข้างขนานกัน ความไม่สมดุลของเฟสอาจเกิดจากตำแหน่งของโรเตอร์ หากมีการลดอิมพีแดนซ์อย่างน้อยหนึ่งเฟส หรืออิมพีแดนซ์และความเหนี่ยวนำไม่ขนานกัน แสดงว่าความจุของวงจรเปลี่ยนไป บ่งชี้ว่าอาจเกิดการปนเปื้อนของขดลวดหรือการพังทลายของฉนวน
ข้อบกพร่องของการเลี้ยวก่อนกำหนดจะถูกตรวจพบว่าเป็นการเปลี่ยนแปลงของมุมเฟสหรือการตอบสนองกระแส/ความถี่เป็นการเปลี่ยนแปลงในการอ่าน กะสามารถระบุได้ เช่น Fi: 77/76/77 และ/หรือ I/F: -44/-46/- 44
5 การอ่านค่าความต้านทานและความต้านทานที่ไม่สมดุลของอิมพีแดนซ์สามารถนับได้เฉพาะเมื่อคำนึงถึงตำแหน่งของโรเตอร์แล้วเท่านั้น การอ่านจะต้องดำเนินการที่จุดสูงสุดหรือหุบเขาของคลื่นไซน์จากการเปลี่ยนตำแหน่งโรเตอร์
6.0 บรรณานุกรม
ก) IEEE Std 43-2000: แนวปฏิบัติที่แนะนำของ IEEE สำหรับการทดสอบความต้านทานฉนวนของเครื่องจักรที่กำลังหมุน
b) IEEE Std 56-1977: คู่มือ IEEE สำหรับการบำรุงรักษาฉนวนของเครื่องจักรหมุนกระแสสลับขนาดใหญ่ (10,000 kVA และใหญ่กว่า)
c) IEEE Std 118-1978: รหัสทดสอบมาตรฐาน IEEE สำหรับการวัดความต้านทาน
d) IEEE Std 120-1989: คู่มือการทดสอบหลัก IEEE สำหรับการวัดทางไฟฟ้าในวงจรไฟฟ้า
e) IEEE Std 388-1992: IEEE standard for transformers and inductors in electronic power conversion devices.
f) IEEE Std 389-1996: IEEE Recommended Practices for Testing Transformers and Inductors
g) IEEE Std 1068-1990: IEEE Recommended Practices for Repair and Rewinding of Motors for the Petroleum and Chemical Industries
h) Penrose, Dr. Howard W., Motor Circuit Analysis: Theory, Applications and Power Analysis, Achieved by Design, 2001.
i) Fink, Donald and Beaty, H. Wayne, Standard Handbook for Electrical Engineers, Fourteenth Edition, McGraw-Hill, 2000.
j) Sarma, Mulukutl, Electric Machines: Steady-State Theory and Dynamic Efficiency, 2nd Edition, PWS Publishing House, 1996.
k) Mazur, Glen and Proctor, Thomas, Troubleshooting Electric Motors, 2nd edition, ATP Publishing, 1997.
l) Nasar, Syed, Electrical and Electromagnetic Machinery, McGraw-Hill, 1981

AT34™
วิเคราะห์และแนวโน้มความสมบูรณ์ของส่วนประกอบมอเตอร์สำหรับความผิดปกติของกราวด์ ความผิดปกติของขดลวดภายใน การเชื่อมต่อแบบเปิด และการปนเปื้อน – ทั้งหมดนี้ทำได้ด้วยอุปกรณ์มือถือเครื่องเดียว

